Límites del robot
| Descripción |
Los límites de robot restringen los movimientos generales del robot.
Los límites de seguridad restringen las fuerzas y los movimientos en la brida de la herramienta y en el centro de las dos posiciones de la herramienta definidas por el usuario.
|
| Límites de velocidad | 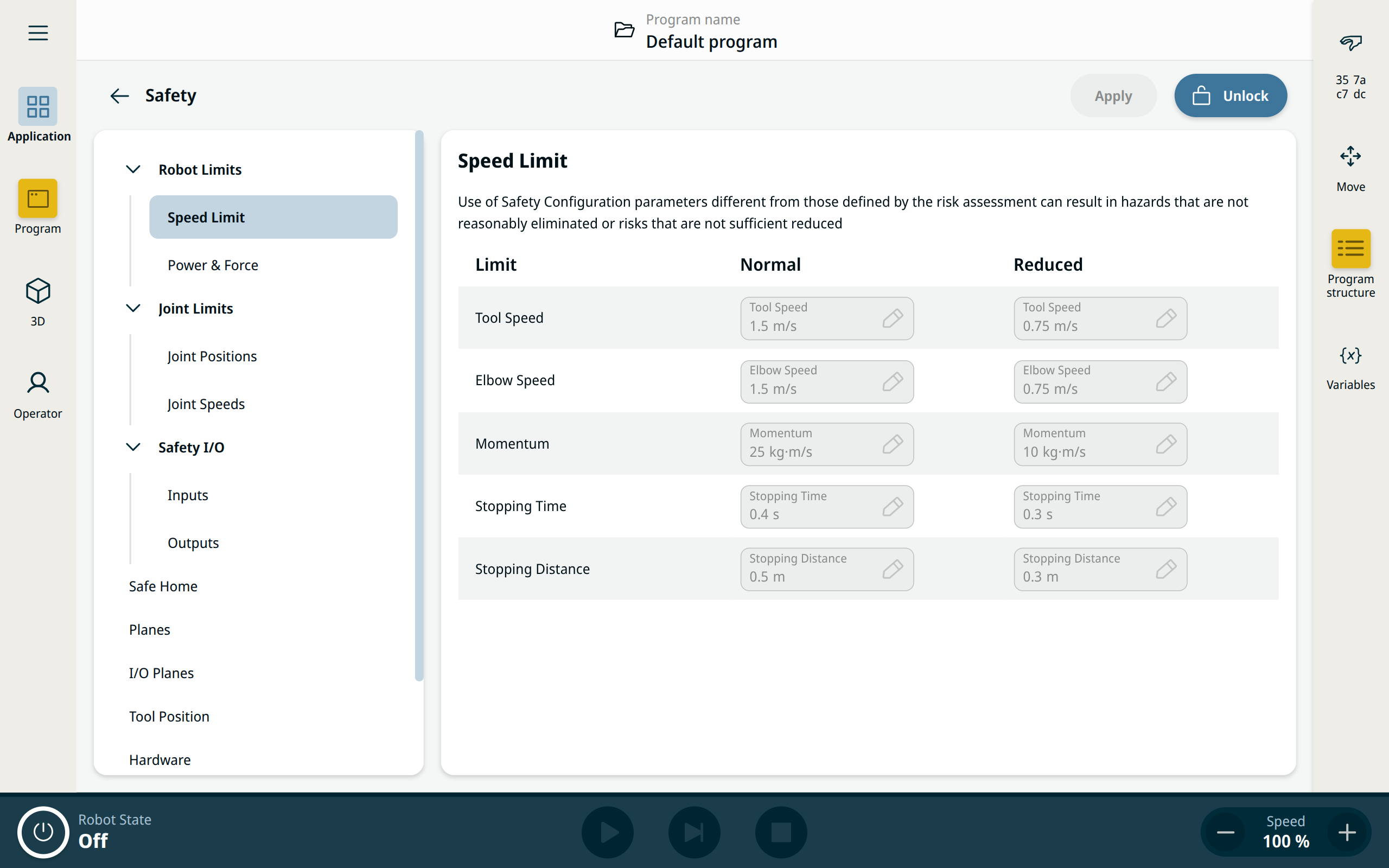
La restricción del tiempo y la distancia de parada afecta a la velocidad general del robot. Por ejemplo, si el tiempo de parada se establece en 300 ms, la velocidad máxima del robot está limitada, lo que permite que el robot se detenga en 300 ms.
|
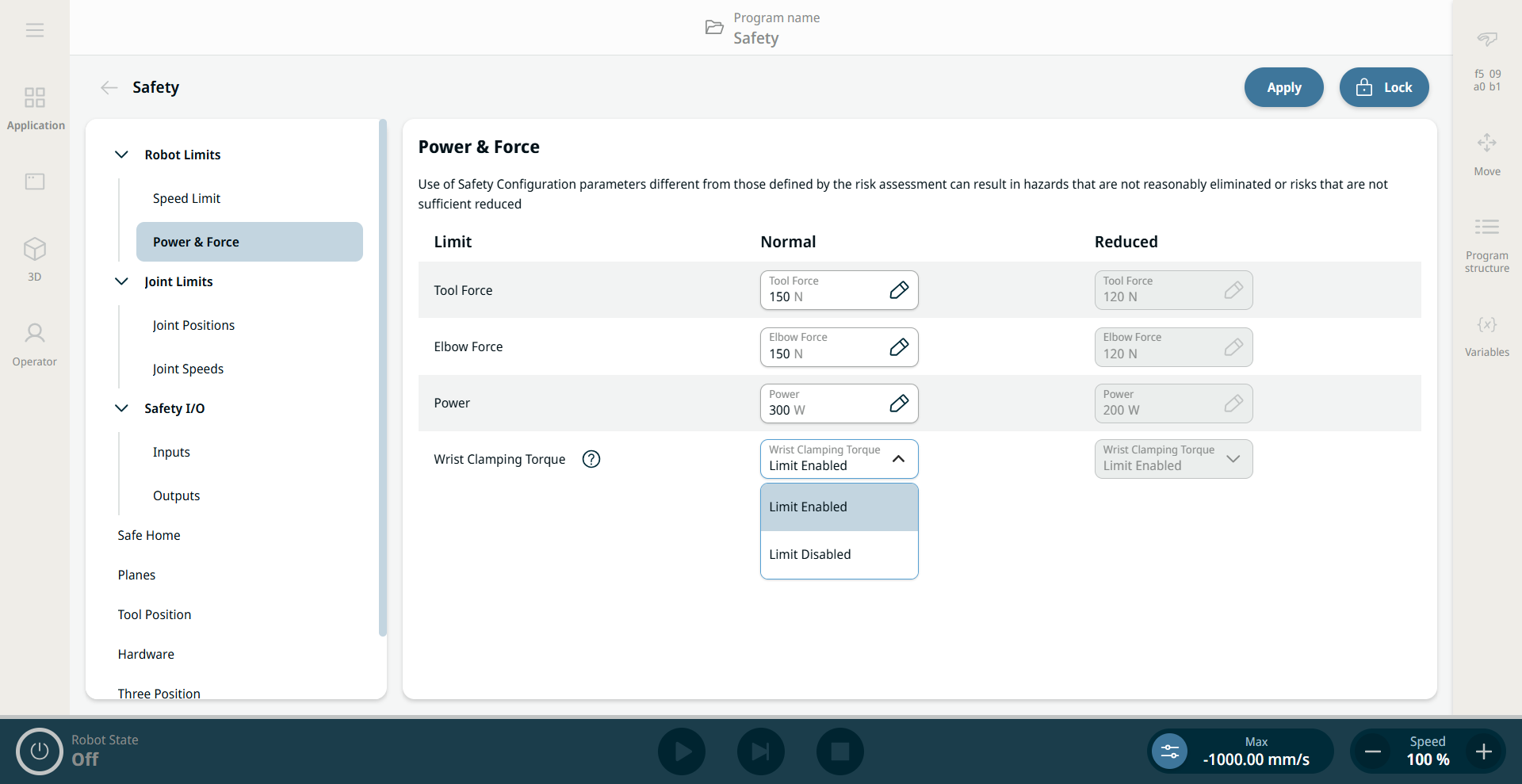
| Potencia y fuerza |
Las fuerzas de la herramienta y del codo pueden superarse por las tres articulaciones de la muñeca si la función de seguridad «par de torsión de obstrucción de muñeca» está deshabilitada.
|