Grundlæggende programknuder: Viapunkter
| Beskrivelse |
Viapunkter er en af de mest centrale dele af et robotprogram, der en bevægelse ad gangen fortæller robotarmen, hvor den skal bevæge sig hen.
Se følgende afsnit om brug af viapunkter:
|
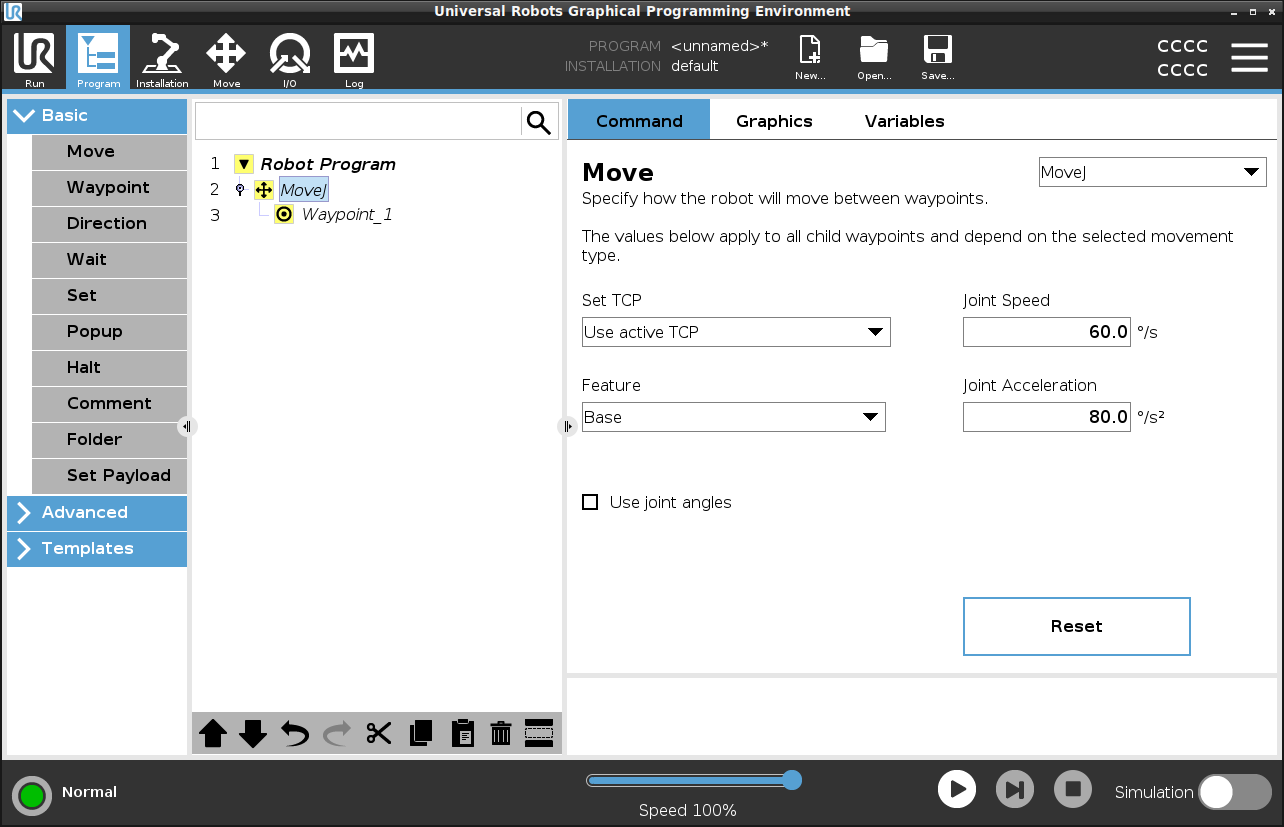
| Tilføj viapunkter
|
Et viapunkt ledsager en Bevæg, så tilføjelse af et Bevæg er påkrævet for det første viapunkt. |
| Tilføj et viapunkt til et robotprogram |
|
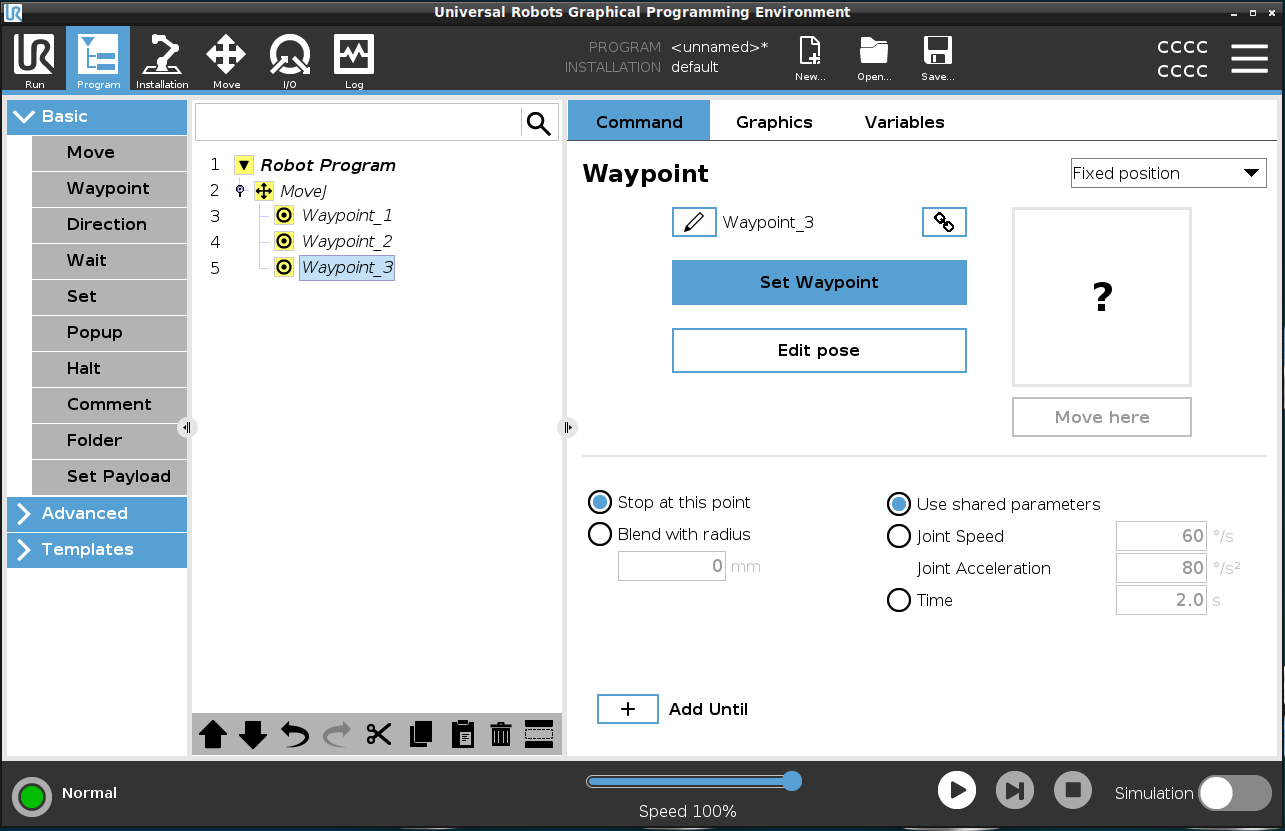
| Tilføj yderligere viapunkter til et Bevæg eller Viapunkt |
Det ekstra viapunkt tilføjes under det viapunkt, du valgte i robotprogrammet.
|
| Detalje |
Brug af et viapunkt betyder, at man anvender den indlærte relation mellem funktionen fra TCP'et i Bevæg-kommandoen. Relationen mellem funktionen og TCP'et, som anvendes på den aktuelt valgte funktion, resulterer i den ønskede TCP-placering. Robotten beregner, hvordan armen skal placeres, så den aktuelt aktive TCP kan nå den ønskede TCP-position.
|