Grundlæggende programknuder: Bevæg
| Beskrivelse |
Kommandoen Bevæg gør det muligt for robotten at bevæge sig fra punkt A til punkt B. Hvordan robotten bevæger sig er vigtigt for den opgave, som robotten udfører. Når du tilføjer en Bevæg til dit programtræ, vises Bevæg-panelet til højre på skærmen. Valgmulighederne i Bevæg-ruden giver dig mulighed for at konfigurere en Bevæg og det vedhæftede viapunkt.
|
| Hastighedsindstillinger |
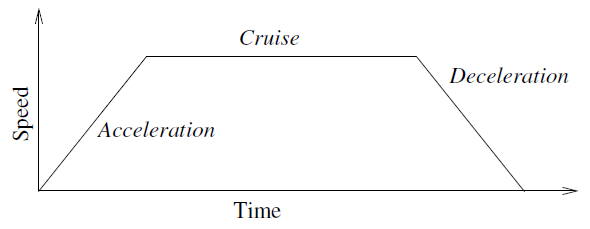
De delte parametre, der gælder for bevægelsestyperne, er den maksimale ledhastighed og ledacceleration.
|

|
Brug ledvinkler-optionen er et alternativ til 3D-posituren, når du bruger BevægJ til at definere et viapunkt.
Viapunkter defineret med Brug ledvinklen ændres ikke, når et program flyttes fra robot til robot. Dette er nyttigt, hvis du installerer dit program i en ny robot.
Brug af Brug ledvinkler gør TCP-indstillinger og funktion utilgængelige. |

|
Brug denne indstilling, hvis du skal ændre TCP mens robotprogrammet kører. Dette er nyttigt, hvis du ønsker at manipulere forskellige objekter i robotprogrammet. Måden hvorpå robotten bevæger sig, justeres afhængigt af, hvilken TCP der er indstillet som en aktiv TCP. Ignorer Active TCP gør det muligt at justere denne bevægelse i forhold til værktøjsflangen. |
|
| For at indstille TCP i en bevægelse |
|
|
Du kan bruge Funktion mellem viapunkter så programmet husker værktøjskoordinaterne. Dette er nyttigt, når du indstiller viapunkterne (se Funktioner).
Du kan bruge Funktion under følgende omstændigheder:
|