Tilføj Indtil
| Beskrivelse |
Programknuden Indtil definerer stopkriterier for en bevægelse. Du kan tilføje Indtil-knuder fra Retning- og Viapunkt-kommandoer. Du kan kun tilføje en retningsknude til en BevægL og BevægP. Robotten bevæger sig langs en bane og standser, når der registreres kontakt.
Du kan føje flere stopkriterier til en enkelt bevægelse. Bevægelsen standser, når den første Indtil-tilstand opfyldes. Du kan tilføje flere på hinanden følgende Tilføj Indtil, fordi der kan være flere betingelser, der skal være opfyldt, før en handling udføres eller køres.
|

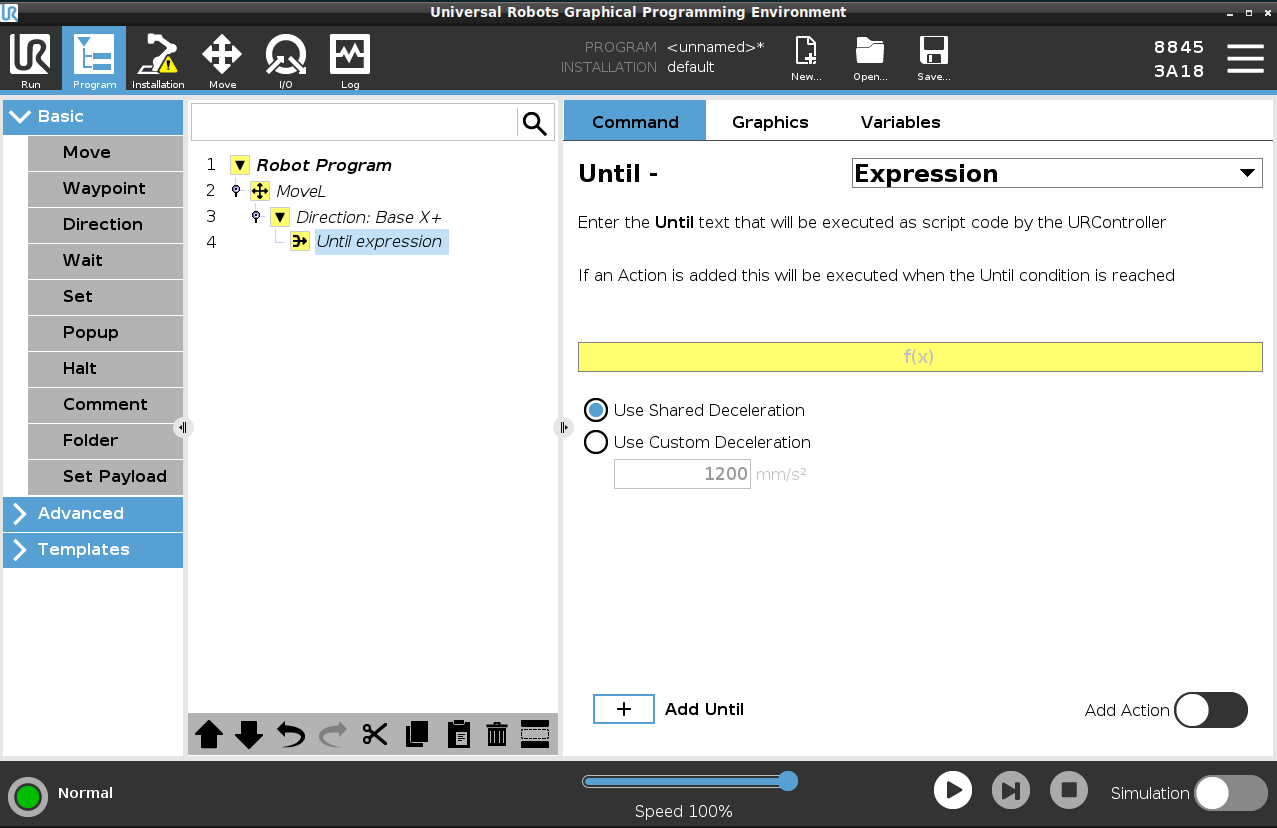


| Tilføj handling |
Denne knude giver dig mulighed for at tilføje en programknude, hvis en specifik Indtil-betingelse er opfyldt. Du kan også tilføje en ekstra handling, der skal udføres lige efter en Indtil-kommando. |
| Eksempel |
Indtil værktøjskontakt kan aktivere gribehandlingen for et griberværktøj. Hvis der ikke er defineret nogen Handling, fortsætter programudførelsen til næste programknude i programtræet.
|
| Tilføj en Ingen handling efter en Indtil-kommando |
|