Sikkert hjem
| Beskrivelse |
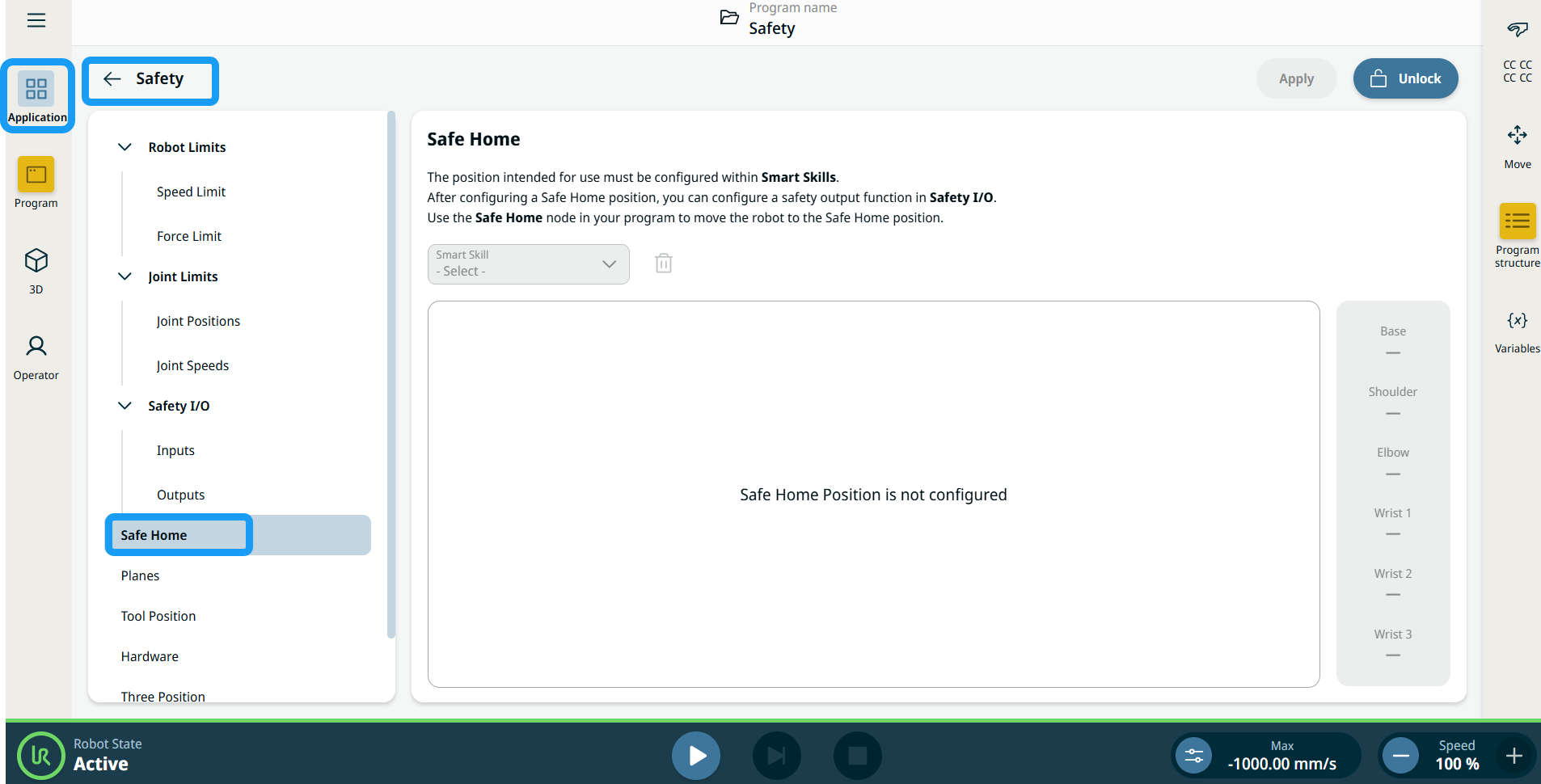
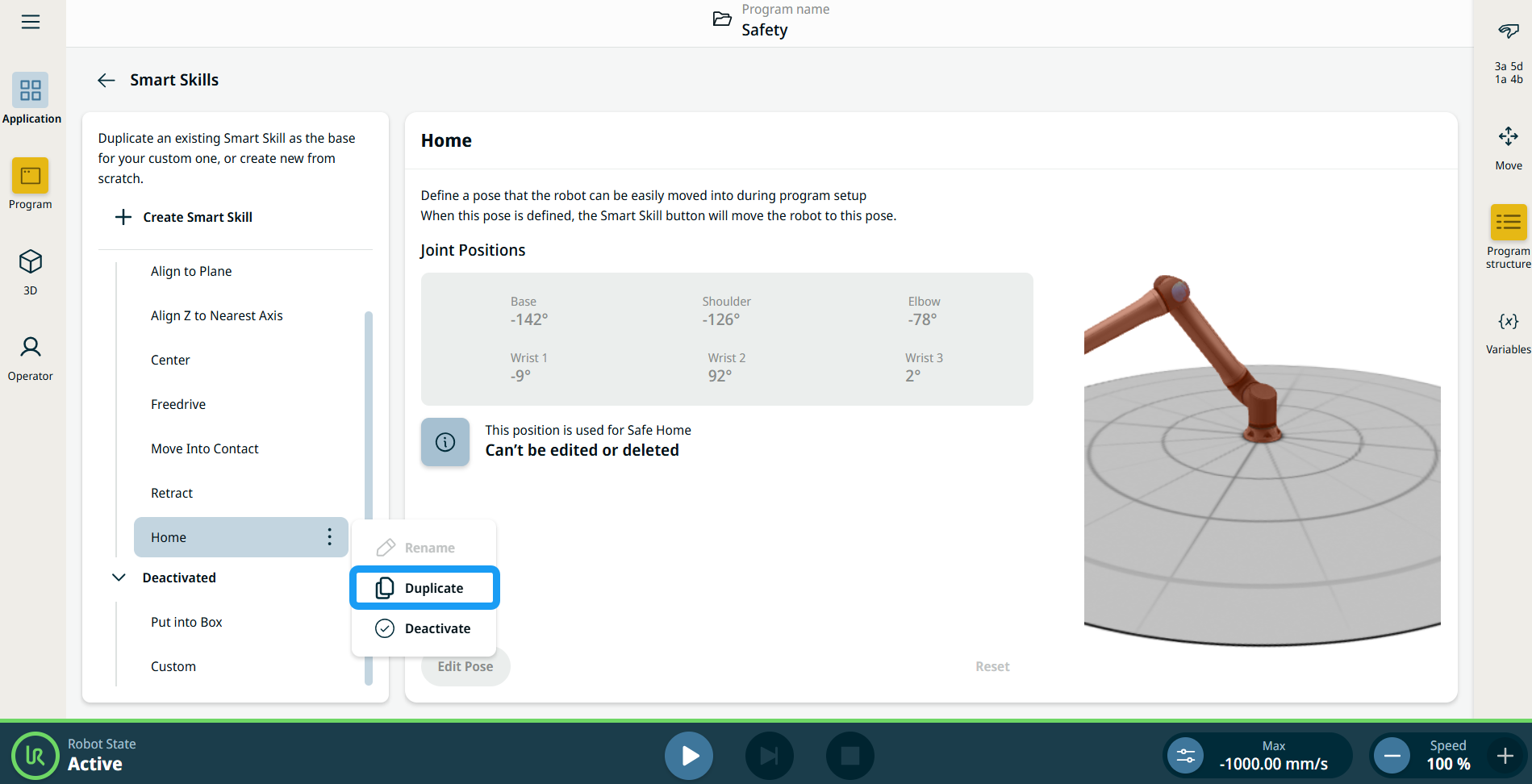
Sikkert hjem er en PolyScope X-funktion, der gør det muligt for brugerne at definere en sikkerhedsrelateret udgang, der aktiveres, når robotten når den konfigurerede sikker hjem-position. Brugeren vælger Hjem i rullemenuen med tilgængelige Smart færdighed-positioner, der kan tildeles som reference for positionen Sikkert hjem.
|
|
Adgang til Sikker Hjem |
|
|
|
|
|
|
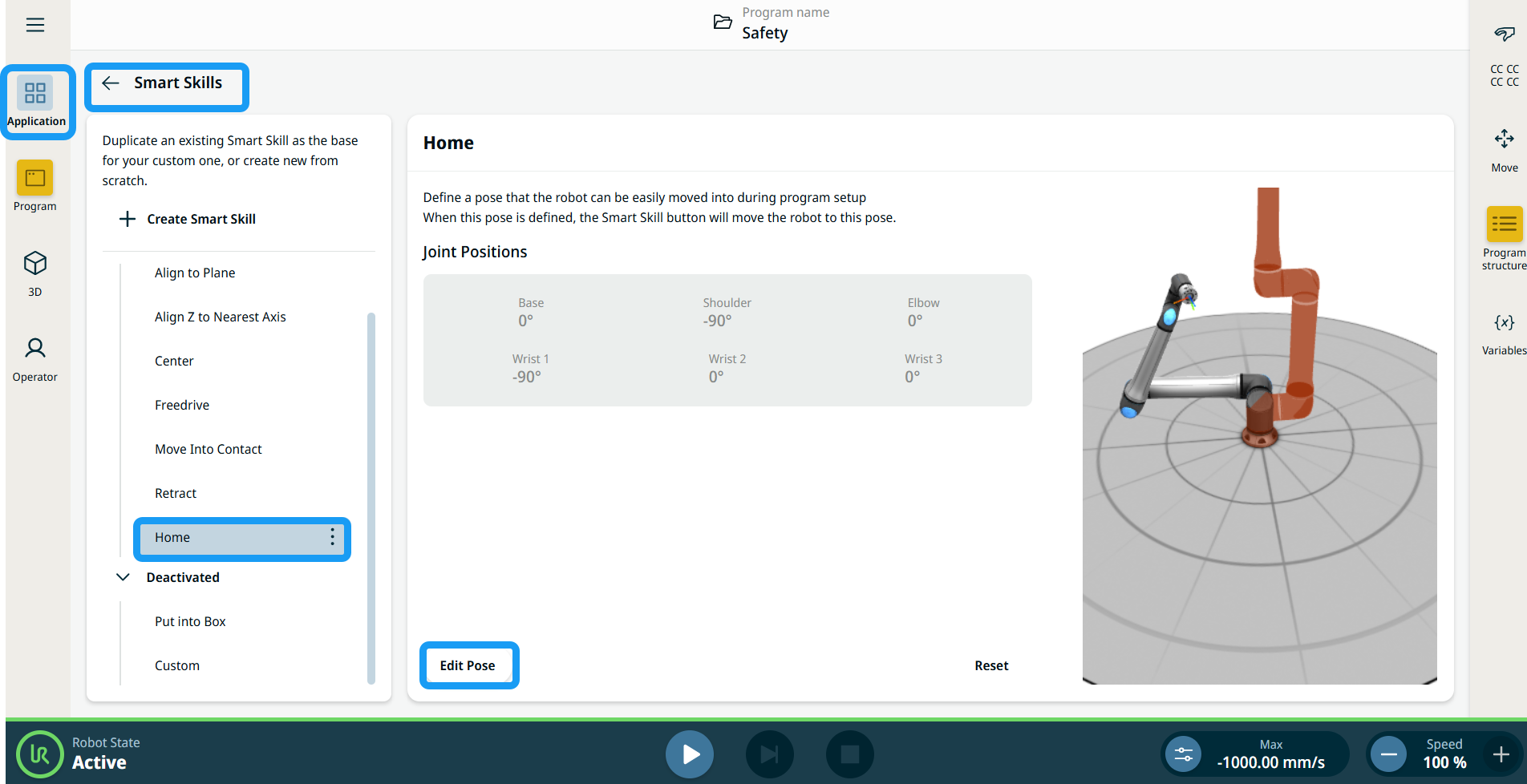
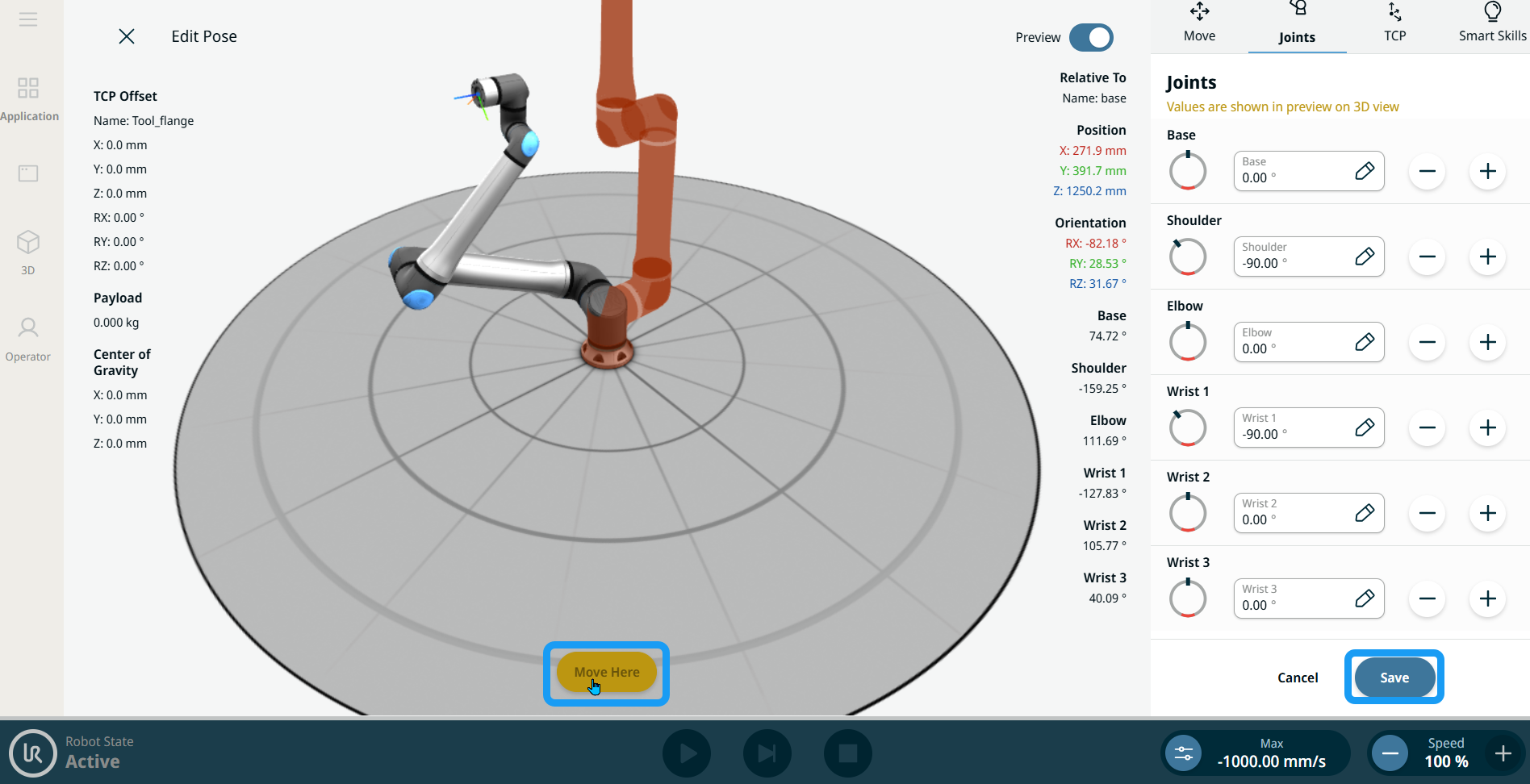
Hvis Position Smart Skill er valgt som positionsreference for Safe Home:
|
|
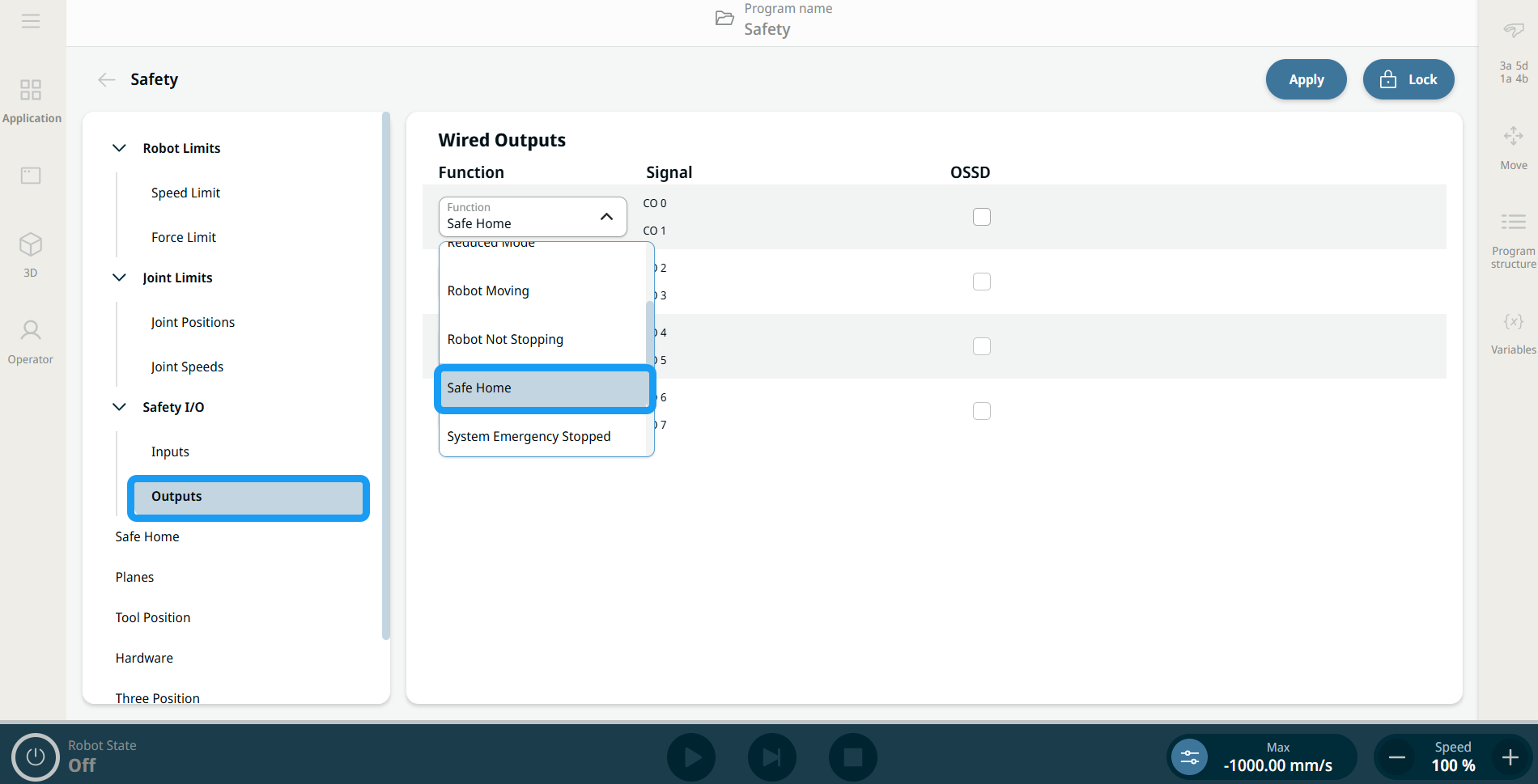
Sikkert hjem-funktion i udgange |
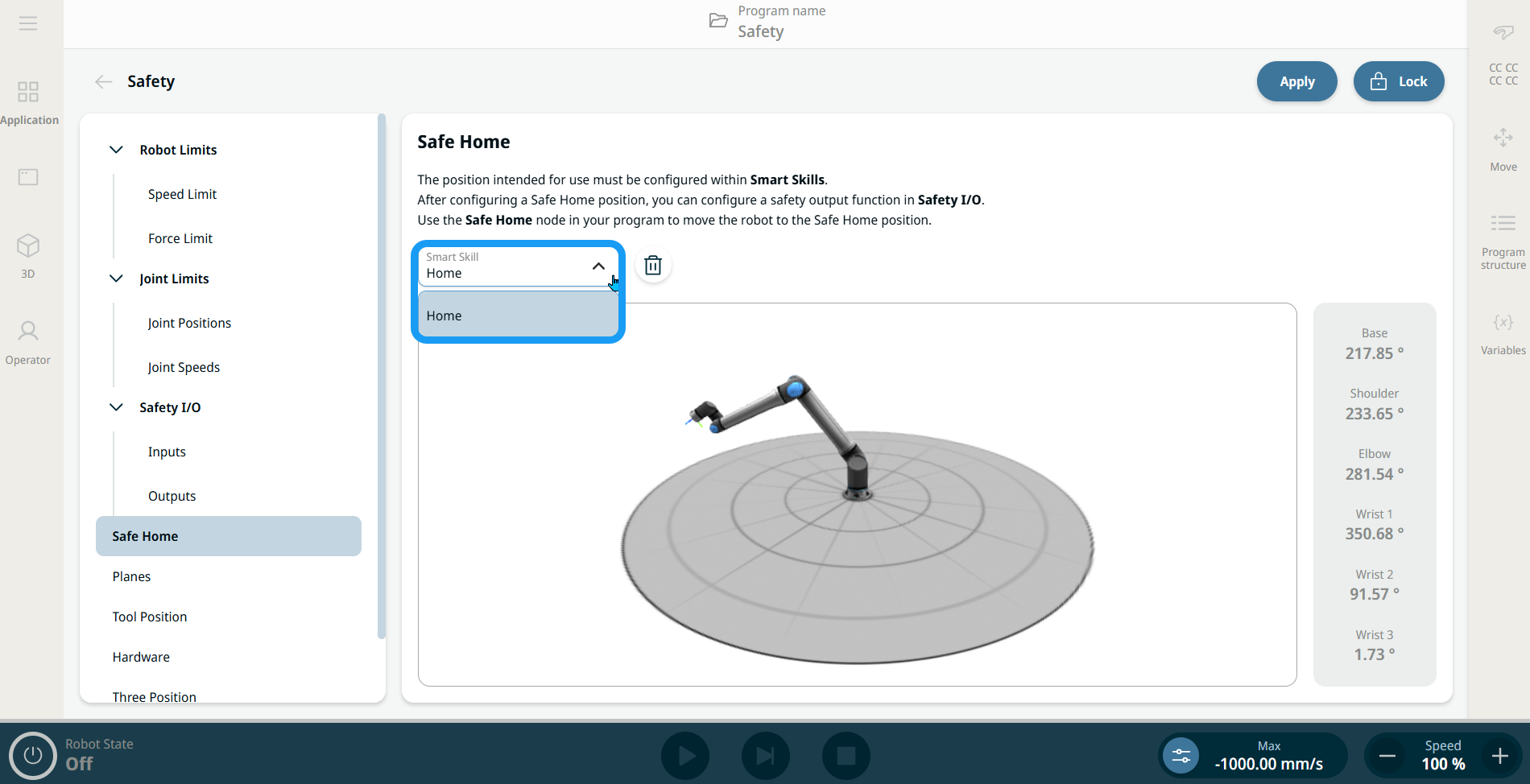
Hvis Hjem-positionen er tildelt en position smart færdighed i Sikkerhed, indeholder rullemenuen for sikkerhedsudgang Sikkert hjem som en ny funktionstildeling. Vælg Sikkert hjem i felterne Funktion i Udgange for Sikkerhed I/O.
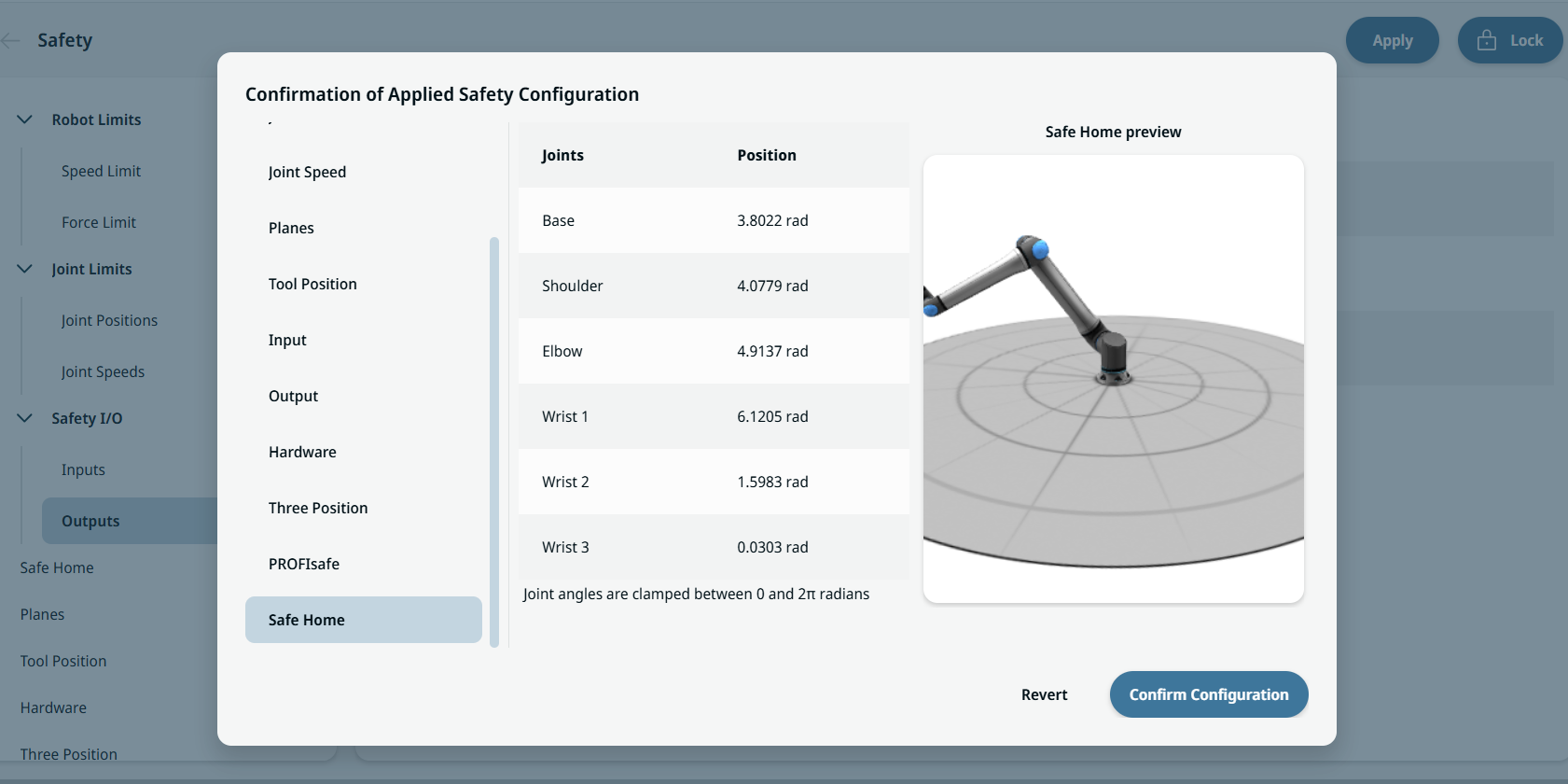
Sikkert hjem kan ses i tabellen over funktionstildeling på oversigtsdialogen Bekræftelse af anvendt sikkerhedskonfiguration.
|
|
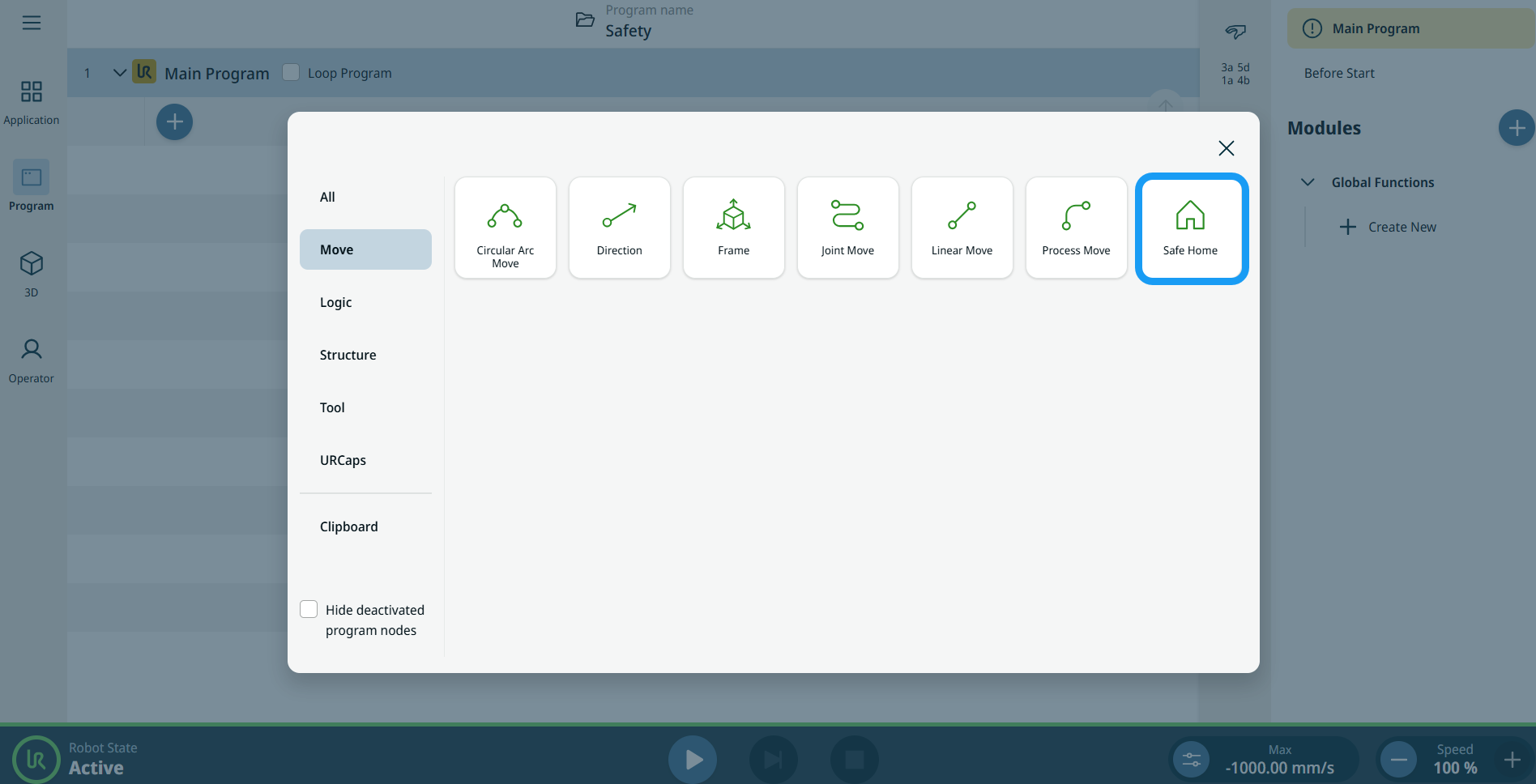
Sikkert hjem som en programknude |
Sikker hjem-programknuden er placeret under kategorien Bevæg-knuder inden for Kommando-knuderne. Denne knude bruges til at få robotten til at bevæge sig til sin foruddefinerede sikker hjem-position, som konfigureret i sikkerhedsprogrammets indstillinger for sikkert hjem.
Tilføjelse af noden uden en sikker hjem-position konfigureret i sikkerhed, vil markere indholdselementet som gult.

Sikker hjem-kommando-noden har bevægelsesprofiler indstillinger og andre avancerede indstillinger, når der trykkes på ellipse-ikonet
|
 .
.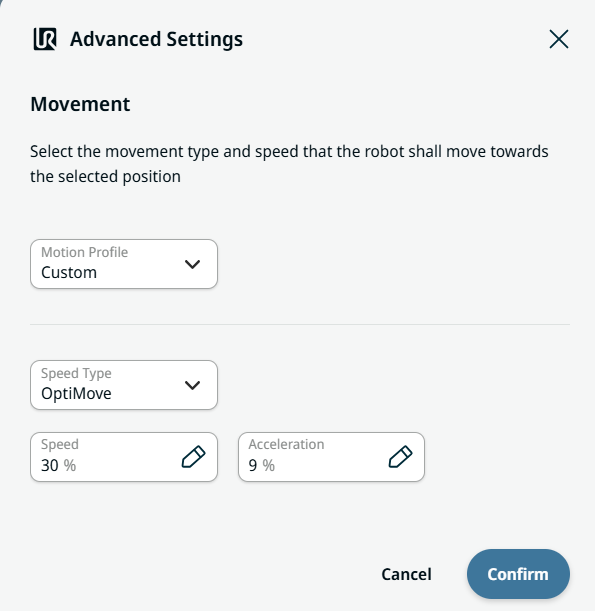
| Avancerede indstillinger |
Brugere kan oprette bevægelsesprofiler i de avancerede indstillinger ved hjælp af de to faner og to felter:
Bevægelsesprofil er en funktion, der gør det muligt for brugerne at indstille foruddefinerede bevægelsesprofiler i bevæg-knuder: Led bevæg, Lineær bevæg, cirkulær bue bevæg, Process bevæg og Retning. Tilpasset bevægelsesprofil giver brugerne mulighed for at definere bevægelsesdata i en bevæg-knude. I feltet Hastighedstype er OptiMove standardindstillingen. Vælg Classic bevægelse, hvis du vil indtaste hastighed og acceleration i grader pr. sekund eller mm pr. sekund. OptiMove-indstillinger er angivet i procent for at forenkle brugen og opsætningen. Brugere kan konfigurere procentdelen af foretrukken hastighed i fanen Hastighed, som fastsætter den tilstræbte kørehastighed som en procentdel af robottens maksimale hastighedskapacitet. Brugere kan konfigurere procentdelen af foretrukken acceleration i fanen Acceleration, som sætter grænserne for måldrejningsmoment under acceleration og deceleration som en procentdel af robottens maksimale effekt.
|