Håndled klemme-momentgrænse
| Beskrivelse |
Håndled klemme-momentgrænse er en indstilling, der muliggør eller deaktiverer begrænsning af det maksimale klemningsmoment for robottens håndled. Begrænsningen er aktiveret som standard. Denne sikkerhedsfunktion begrænser hvor meget drejningsmoment håndleddet kan anvende ved skubning.
|
|
Oplysninger om håndled klemme-momentgrænse |
Når det er aktiveret, begrænser robotten drejningsmomentet i håndleddene for at forhindre klemning mellem håndleddet, nyttelast og den nederste arm på robotten. Når indstillingen er aktiveret, definerer den også en ikke-sikkerhedsvurderet øvre grænse for de anvendte momentområder ved base-, skulder- og albueleddene. I kraftstyrede applikationer kan de kontaktkræfter der kan opnås være betydeligt lavere end de kræfter, der er angivet i sikkerhedsfunktionerne grænseværdien for værktøjskraft og albuekraft.
Når det er deaktiveretkan robotten bruge størrre skubbekraft med håndleddene til for eksempel kraftstyrede applikationer. Når funktionen er deaktiveret, skal risikoen for klemning mellem håndleddet, nyttelasten og den nedre arm på robotten forebygges med andre midler. Denne sikkerhedsfunktion er som standard aktiveret på alle robotter. I PolyScope X version 10.12 og nyere er det muligt at deaktivere denne sikkerhedsfunktion.
|
|
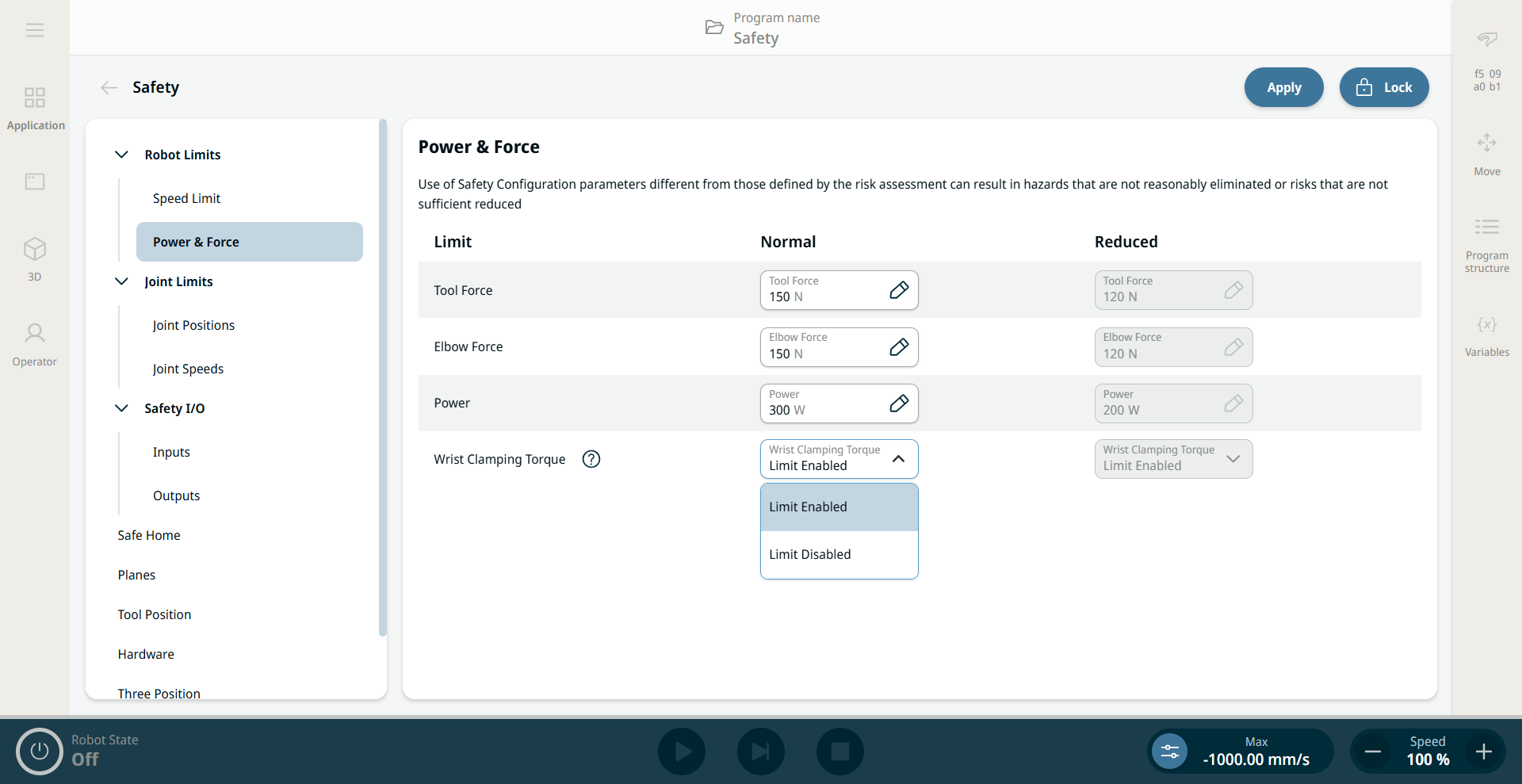
Aktiver og deaktiver Håndled klemme-momentgrænse |
|