Værktøjspositionsbegrænsning
| Detaljer |
Værktøjsposition har to hovedfordele:
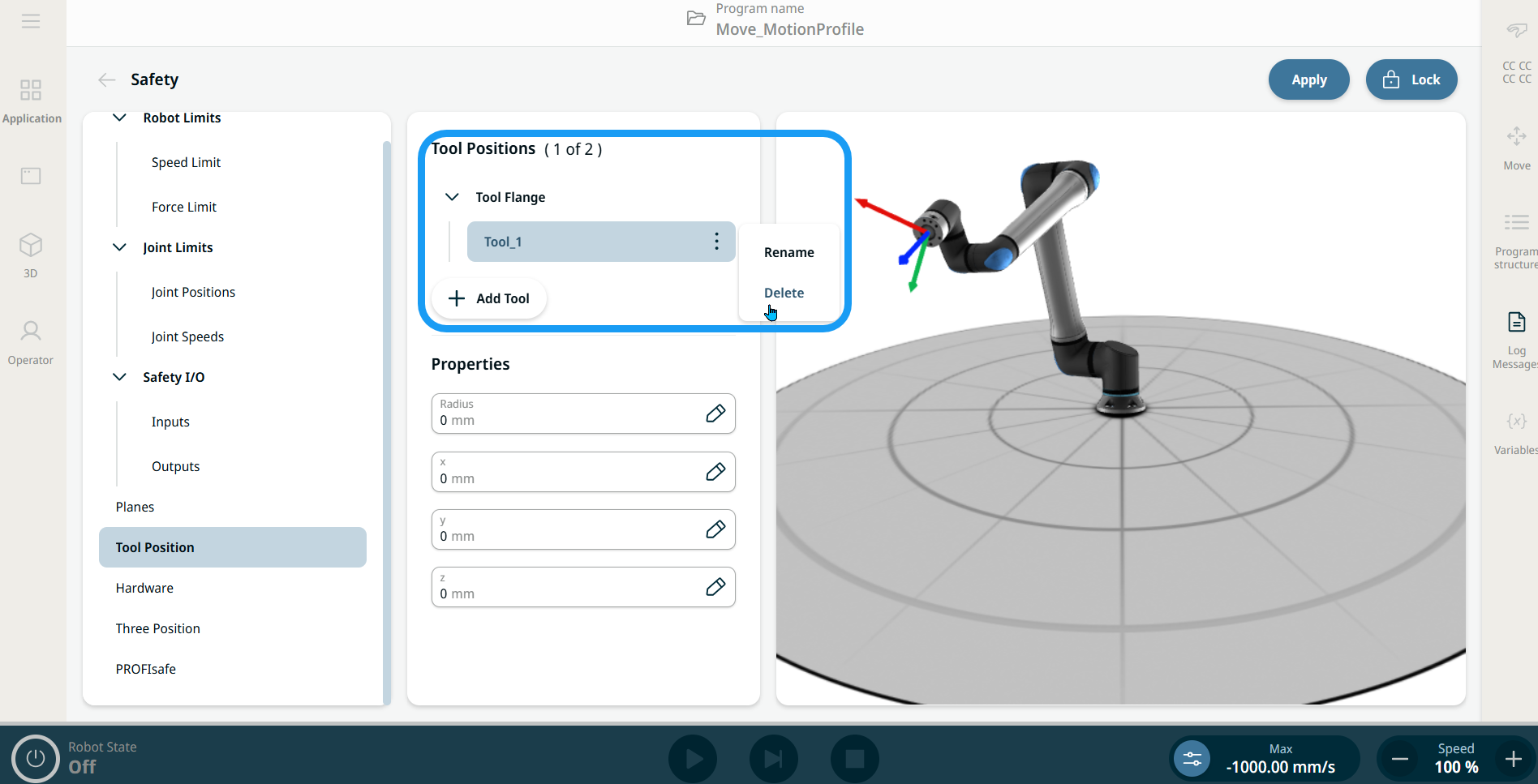
Du kan definere, konfigurere og administrere op til to værktøjspositioner.
|
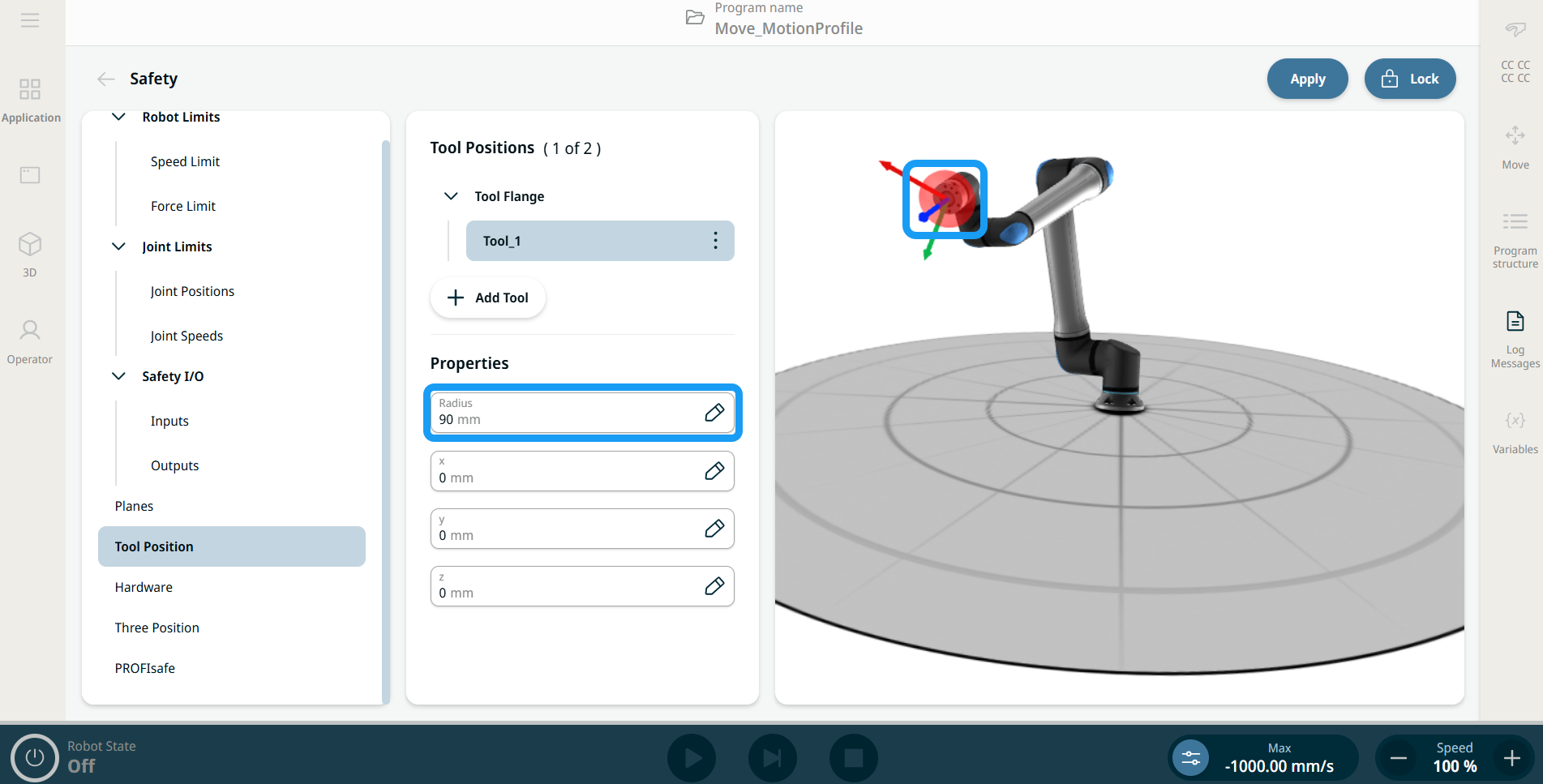
| Brugerdefinerede værktøjer |
For de brugerdefinerede værktøjer kan brugeren ændre:
|
|
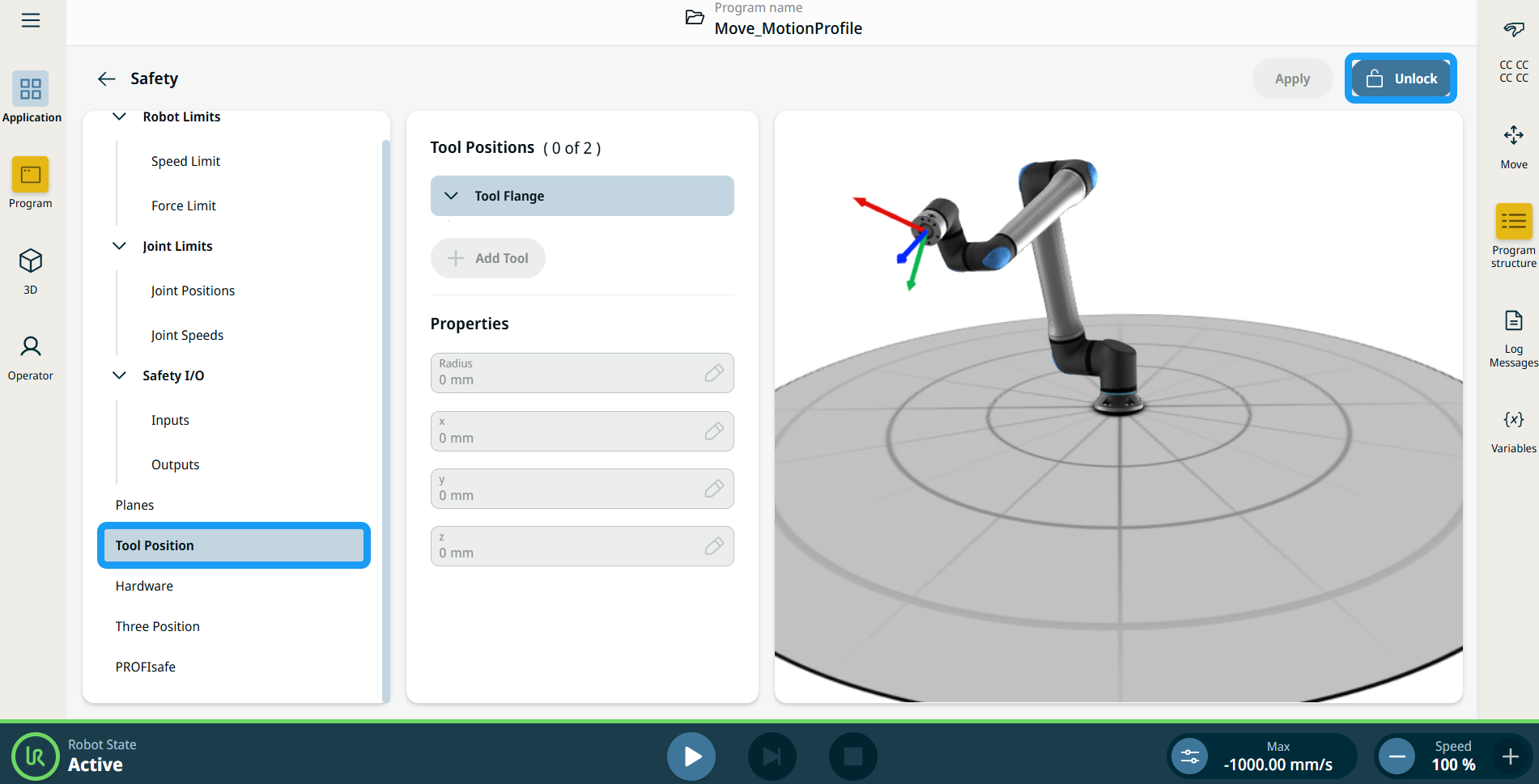
For at få adgang til værktøjsposition |
|
|
|
|
|
|
|