Circular Arc Move
| Popis |
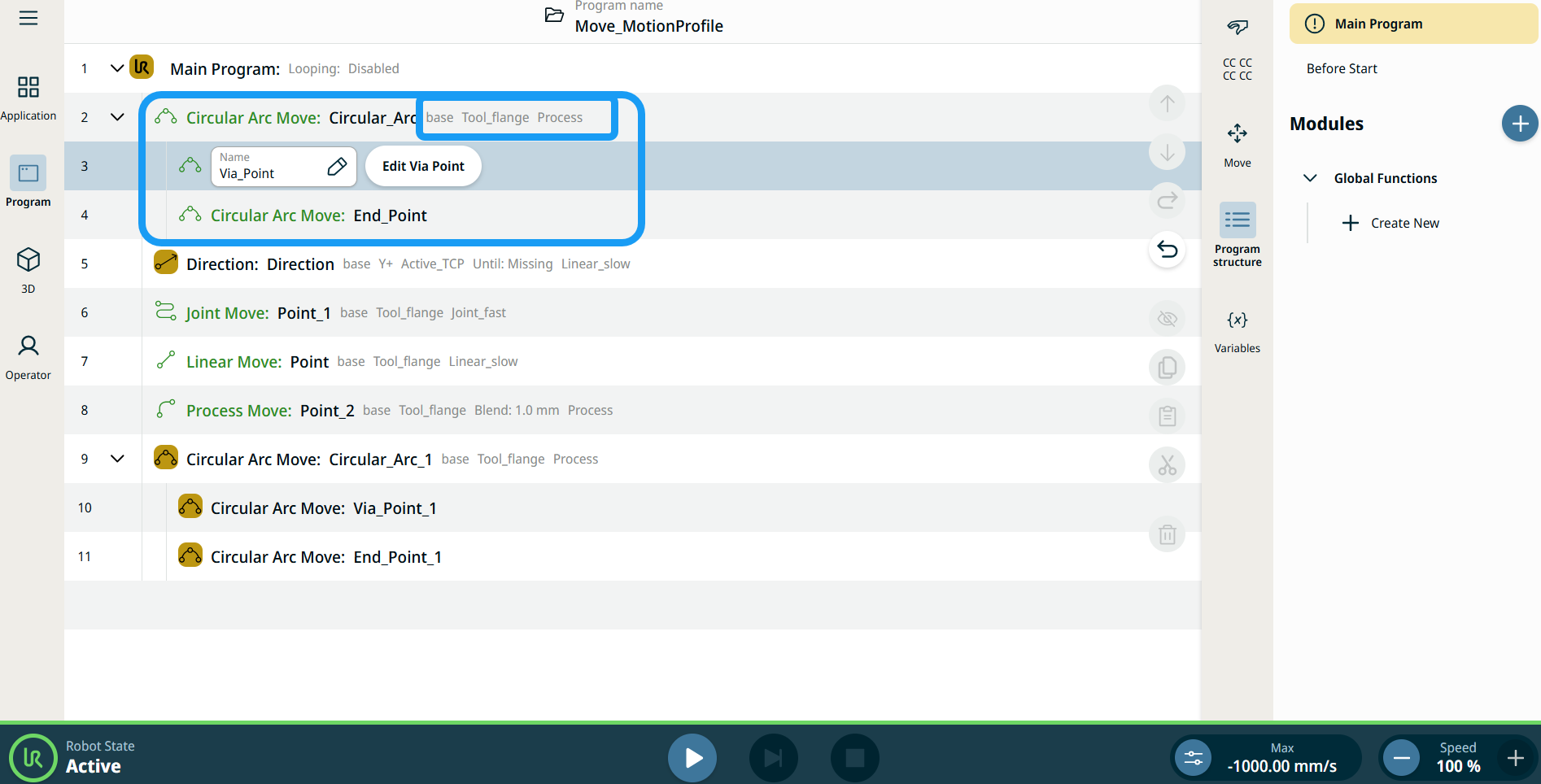
The Circular Arc Move enables you to program the robot to move in a circular motion while keeping the tool orientation either fixed or unconstrained.
|
|
To access Circular Arc Move command |
|
|
The three editable fields are:
|


| Štítky profilu pohybu na uzlech pohybu |
Všechny příkazové uzly související s pohybem ve stromu programu zobrazují profil pohybu přidružený ke každému uzlu. Tato funkce uživatelům umožňuje zobrazit vybraný profil pohybu na uzlu pohybu. Tato funkce je implementována na následujících uzlech příkazů: Uzly pohybu s vlastním profilem pohybu budou místo profilu pohybu zobrazovat hodnoty rychlosti a zrychlení. |
|
|
|
| To access More settings |
Tap the More button, and the More settings screen appears. On the left side, you see four advanced options:
|

|
To use Orientation |
|

|
To use Movement |
|
 Two fields appear:
Two fields appear:|
To use Reference |
|

|
To use Transform |
|
|
To use Circular Arc Move: Via_point |
|

|
To use Circular Arc Move: End_Point |
|
