How To Attach The Calibration Connector
| Description |
The Calibration Connector attaches the two robot arms via the tool flanges.
|
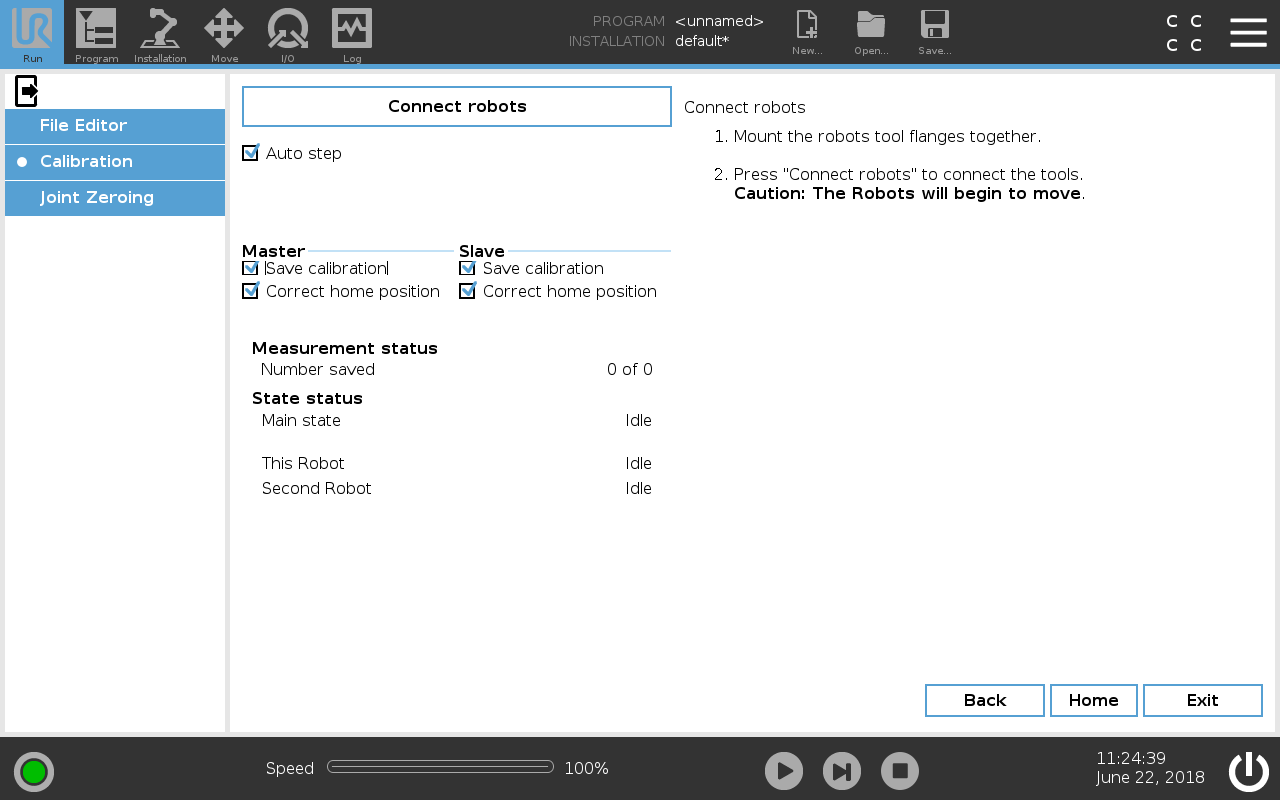
| To attach the Calibration Connector |
As both robots move to bring the tool flanges close to each other, the Slave robot enters Freedrive.
|
| The following illustrations show the Calibration Connector in use |
|
