Joint Deviations
| Description |
When a joint reaches its maximum allowed torque its position will start to deviate from the joint angle it is trying to maintain. Joint deviations often result in protective stop warnings, which are not an acceptable part of normal operation. Having the robot in a pose which results in a large proportion of the torque reaction force impacting a single joint (with joint axis parallel to screw tightening axis for example) increases the chances of this occurring and should be avoided as much as possible.
|
|
|
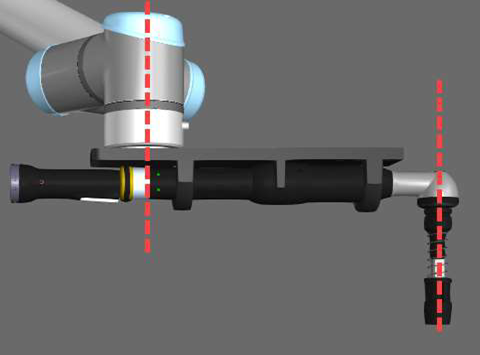
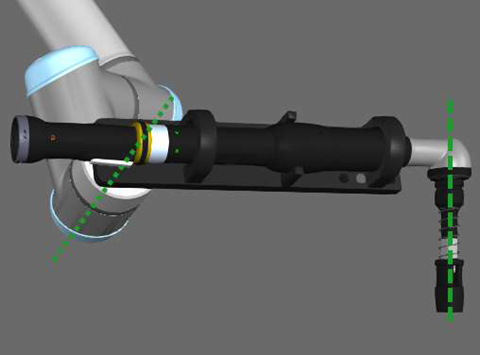
While the angles between rotation axes of the first five robot joints and the tool tightening axis will vary depending on the robot pose when tightening the screw, the relationship between the final joint (Wrist 3) and the tightening axis is fixed and defined by the tool mounting bracket. As such, to inimize possible deviations at this joint, it is recommended to maintain at least a 30 degree angle between the rotational axis of Wrist 3 and the tightening axis. Ideally the tool should be mounted in such a way that the tightening axis is not close to parallel with any of the three robot wrist joints when tightening, but this may not be possible at all screw tightening positions.
The torque reaction force will not directly cause a position deviation in a joint if it is parallel to the tightening axis (the lever arm would suggest it will be pushed by the force not rotated), but it will instead be pulled away from its target position if the other robot joints deviate from their positions as a result of the torque reaction (further explanation of this phenomenon is beyond the scope of this document).
|