Example
| UR10 CB3.0 |
|

| Joint Graphs |
|
| Description |
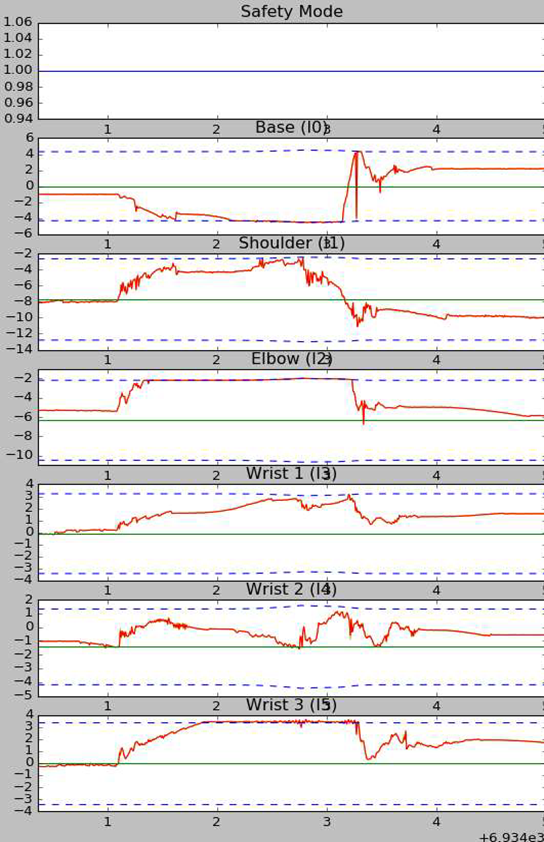
According to the above data plots, although the robot is in steady mode and no protective stop has occurred, this is not an acceptable scenario for a high torque screwdriving application.
The Base, Elbow and Wrist 3 currents are deviating from their targets as expected, but they are then hitting a limit, shown by the plots flattening to horizontal. This means that these joints cannot apply any more torque to oppose to the force that is transferred from the screwdriver, and position deviation protective stops are likely to occur.
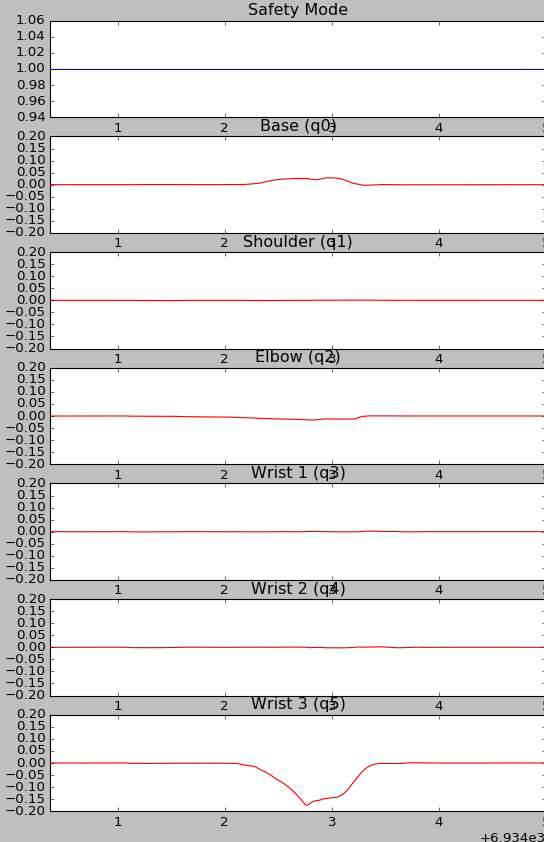
In the right plots, angle deviations can be observed in all three joints that hit the limit in the left plots, with the biggest deviation in Wrist 3. Mounting a right-angle nut runner with Wrist 3 aligned with the tightening axis is likely to produce a large deviation in that joint when torque limits are reached. Wrist 3 deviation reaches roughly 10 degrees, at which point it would also be clearly visible to the naked eye.
The robot pose has the tip of the screwdriver (TCP) beneath the lower arm very close to the elbow joint axis of the robot. This condition together with the default safety settings force limit restricts the allowed torque of this joint, and it is subsequently the first one to hit its limit.
A number of the recommendations presented in this document to increase the torque withstanding capabilities of the robot have been applied in this example, but due to the 120 Nm target torque (that we earlier classified in the most difficult category - not extensively researched, most likely requires innovative technologies or additional hardware), careful consideration of all recommendations and an exhaustive analysis of data is required. Even then, alternative solutions such as pulse-driven tools or torque arms may be necessary to successfully deploy this application.
|