First Program
| Description |
The first program creation in PolyScope X enables you to teach the robot arm how to move using a series of waypoints to set up a path for it to follow. An End Effector tool should be attached at the end of the arm. See End Effectors Application on how to configure the tooling at the end of the arm. See End Effectors Application in the Software Handbook on how to configure the tooling at the end of the arm.
|
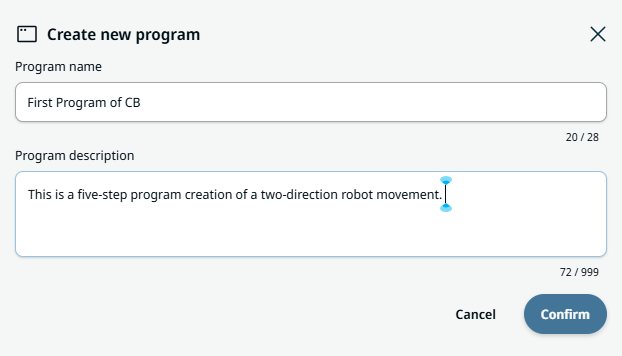
| To create a simple program |
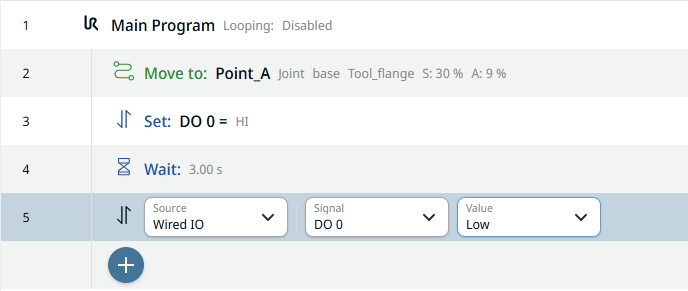
These are the processes of this first program:
|
|
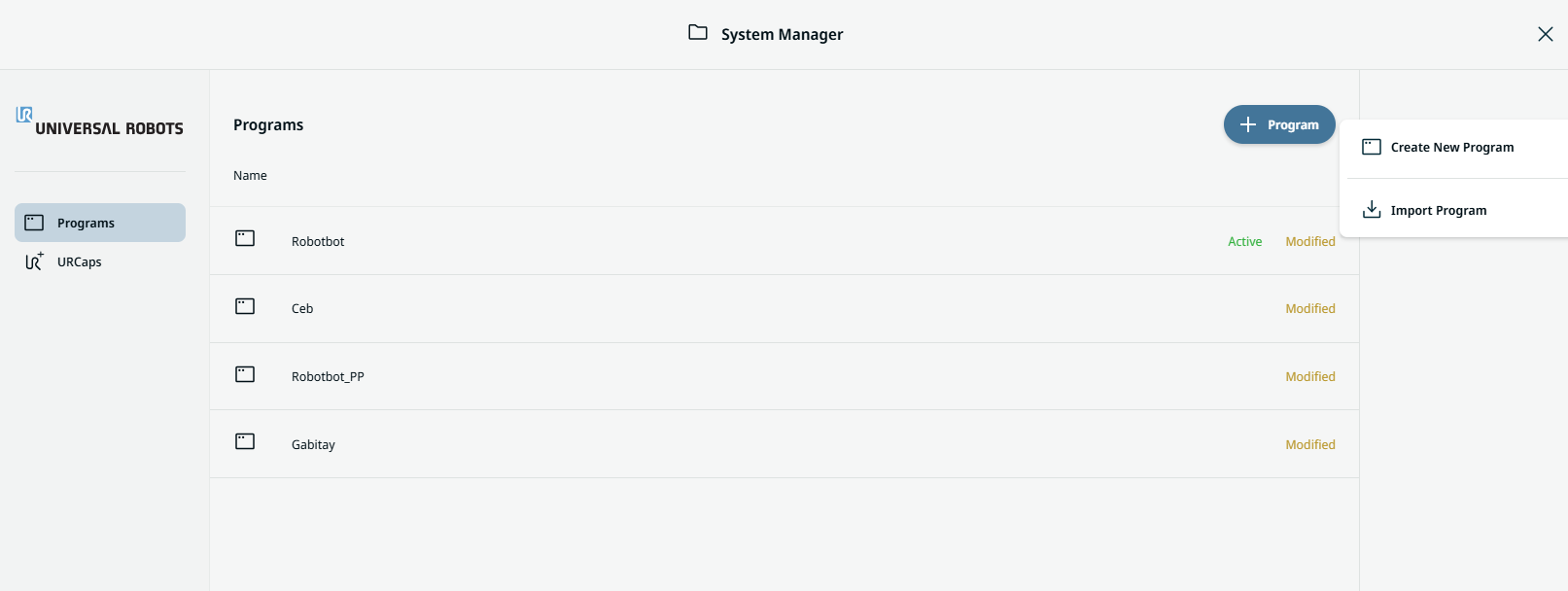
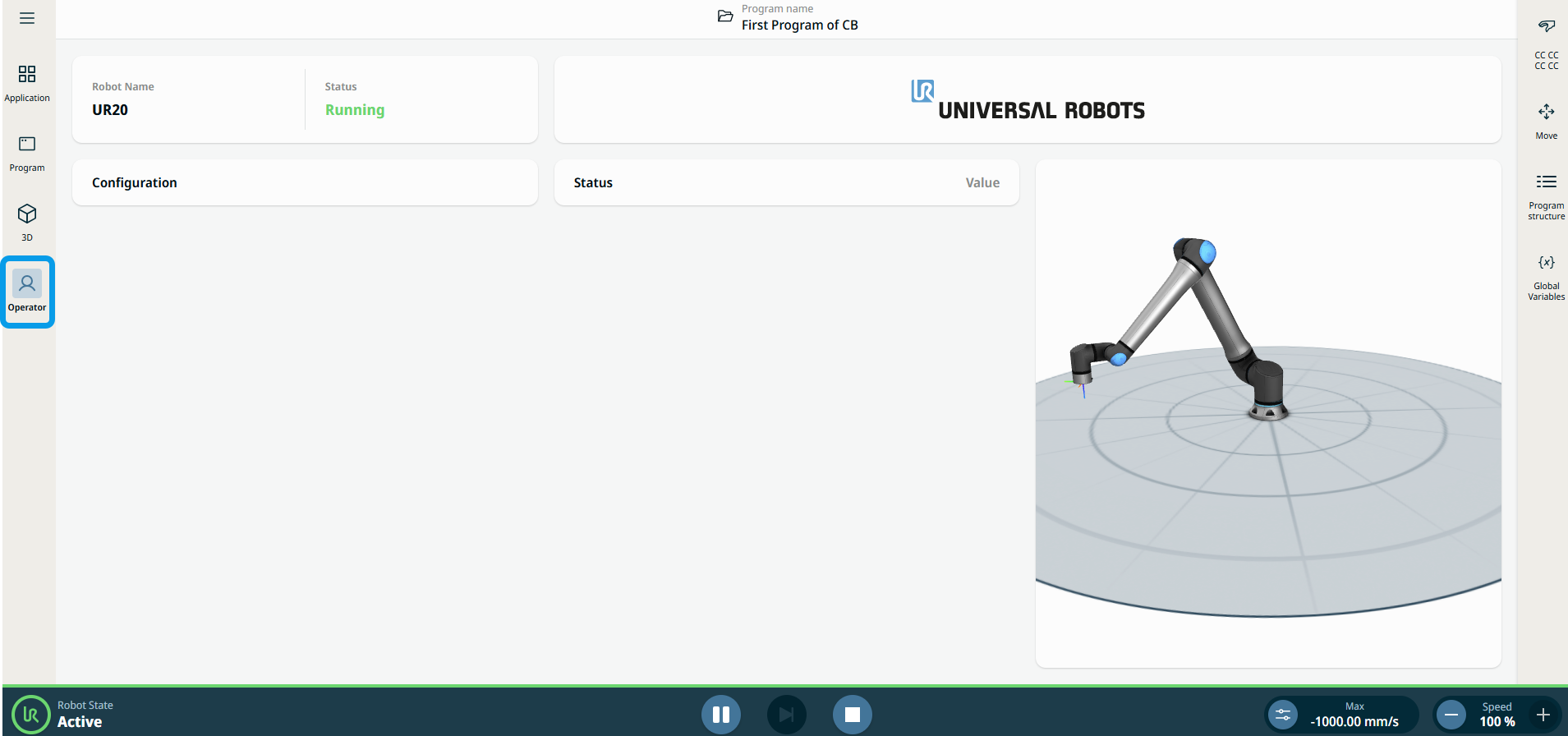
System Manager access |
|
|
|
| Initialize Robot |
|
|
|
|
|
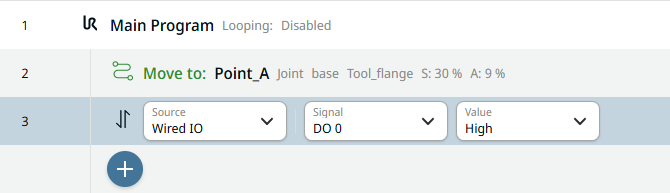
First command: Joint Move
Action: move to |
|
|
|
|
|
Name the first waypoint |
|
|
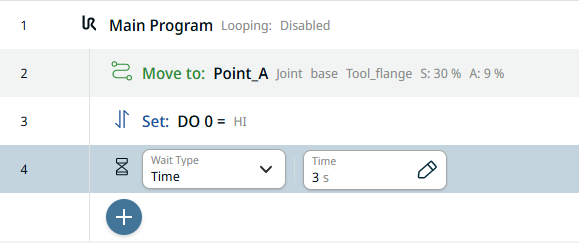
Second command: Set Action: Set an IO for the end effector |
|
|
Third command: Wait
Action: robot waits for a specified number of seconds |
|
|
Fourth command: Set
Action: Unset an IO for the end effector |
|
|
Fifth command: Joint Move
Action: move to |
|
|
Name the second waypoint |
|
|
Verify the program in 3D viewer |
|
|
|
|
|
Verify the program in Communication |
|