02 - 도전
가장 높은 평가를 받는 스포츠 안경 브랜드 제조업체인 렘 옵티컬 (LEM Optical) 은 여러 가지 적용 과제에 대응하여 협업 자동화를 도입하기로 결정했습니다. 지금까지 이 회사는 3가지 프로세스에 4대의 Universal Robots 협업 로봇 을 설치했습니다. 각 프로세스는 특정 과제를 제시했습니다.
- 레이저 렌즈 마킹: 이 응용 프로그램의 과제는 레이저 초점과 원통형 렌즈 사이의 일정한 거리를 유지하고 전체 표면의 마킹을 보장하기 위해 렌즈의 움직임으로 레이저 빔을 보간하는 것이 었습니다.
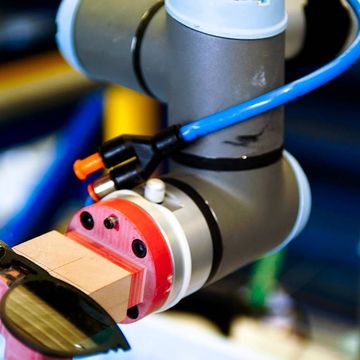
- 수성 접착제 디스펜스: 패딩의 일부 영역을 피하여 미리 설정된 궤적을 따라 스키 고글의 폼 패딩에 특정 양의 접착제를 적용해야 했습니다. 이 애플리케이션은 중장비를 수용할 수 없는 메자닌 바닥에 설치되었기 때문에 일련의 중량/발자국 기준을 충족해야 했습니다.
- 사출 성형기 경향: 비공학적 작동을 자동화하고 사이클 시간과 효율성을 최적화하는 것이 과제였습니다.
사례 하이라이트
01 - 짧은 이야기
렘 옵티컬 (LEM Optical) 은 이탈리아 갈리아테 롬바르도에 위치한 회사로, 선도적인 안경 브랜드를 위한 고성능 안경 및 스키 고글을 제조하고 있습니다. 인건비가 낮은 국가의 경쟁, 모델 변형에 대한 수요 증가, 일반화된 비용 절감과 같은 주요 과제는 LEM이 자동화를 향해 빠르게 나아갈 수 있도록 이끌었습니다. 이 회사는 현재 레이저 마킹, 디스펜싱 및 사출 성형 기계 관리에 4대의 유니버설 로봇 (Universal Robots) 을 배치했습니다.
03 - 해결책
LEM Optical 은 공식 Universal Robots 유통업체인 Alumotion 에 가서 cobots 의 통합을 처리하고 세 가지 프로세스를 자동화했습니다.
협업 레이저 마킹
레이저 렌즈 마킹 적용을 위해 두 개의 동일한 셀에 두 개의 UR3 cobots 가 설치되었습니다. 코봇 (cobot) 은 LEM이 별도로 개발한 진공 그리퍼로 렌즈 (이미 고글 프레임에 삽입됨) 를 집습니다. 그런 다음 레이저 아래에 렌즈를 놓고 초점으로부터의 거리가 일정하게 유지되도록 움직여 블레이드가 렌즈의 가장자리 주위에 작용하여 표시하도록 합니다. 사이클이 끝나면 (두 렌즈의 마킹을 완료하는 데 약 3분 소요) 로봇은 렌즈와 프레임을 랙에 놓습니다. 두 셀은 각각 20 ~ 40개의 렌즈를 포함하는 버퍼에 의해 공급됩니다.
LEM의 제너럴 매니저이자 공동 소유주인 스테파노 로디지아니 (Stefano Lodigiani) 는 "코봇 (cobots) 없이는 이런 일을 할 수 없었을 것" 이라고 말합니다. "수동으로 레이저 초점으로부터 일정한 거리를 유지하는 것은 불가능한 반면, 코봇 (cobots) 은 공정을 완벽하게 수행하는 데 필요한 정밀도와 반복성을 보장합니다. 또한 두 셀의 피드 버퍼 덕분에 이 단계는 이제 완전히 자동화되었습니다. 작업자는 한 시간에 한 번 정도 버퍼 로딩과 품질 관리라는 두 가지 작업만 수행합니다. 이를 통해 우리는 인력을 최적화하고 직원을 이 섬세한 운영에 대한 높은 정밀도를 유지하면서 더 큰 부가가치를 지닌 직무에 배정할 수 있었습니다."
\ *\ * 접착제 디스펜싱\ *\ *
LEM의 핵심 제품에는 여러 스키 고글 모델이 포함됩니다. 고글 프레임에 접착할 폼 패딩의 특정 영역에 접착제를 분배합니다. 생산 매개 변수 조정의 결과로 이제 패딩이 프레임 밖으로 약 2mm 돌출됩니다. 접착제는 프레임과 접촉하는 부분에만 적용되어야 합니다. Stefano Lodigiani는 "수동으로 동일한 궤적과 일정한 속도로 필요한 반복성으로 이 작업을 수행하는 것은 불가능했습니다." 라고 설명합니다. “그래서 탱크에서 공급되는 디스펜서가 장착된 UR5를 설치했습니다. 이 디스펜서는 항상 동일하고 일정한 속도로 궤적을 따라 패딩에 접착제를 분배합니다. 우리는 일관되고 고품질의 제품을 얻었습니다. 또한, 이 단계는 공장 내부의 중이층에서 수행되므로 레이아웃이 이미 상당히 꽉 차 있고 중이층을 과부하시킬 수 없다는 점을 감안할 때 자동화는 특정 중량 및 풋프린트 조건을 충족해야 했습니다. UR5의 무게는 20kg 미만이며, 계단 위로 쉽게 운반하여 어렵지 않게 설치했습니다.”
\ *\ * 사출 성형기의 경향\ *\ *
LEM이 개발한 세 번째이자 마지막 응용 분야는 사출 성형기의 경향입니다. 이 기계는 스키 고글 프레임을 성형합니다. UR10 코봇 (cobot) 은 수형 금형을 기계 내부에 배치하고, 사이클이 완료되면 제거하고, 작업자가 완성된 프레임에서 금형을 분리하는 이송 영역에 배치합니다. 코봇 (cobot) 에는 4점식 픽업 장치가 장착되어 있습니다. 두 개의 점으로 두 개의 빈 수형 금형을 집어 기계에 넣습니다. 동시에 다른 두 점은 성형 프레임으로 다른 두 개의 금형을 제거합니다. 작업자가 분리하면 새로운 사이클이 시작됩니다.
"이 응용 프로그램에서 cobot 은 두 가지 주요 요구 사항을 충족합니다." 라고 Stefano Lodigiani 는 설명합니다. "몰딩 스테이션의 인체 공학성을 향상시키고 (몰드의 무게는 각각 약 1kg이므로 작업자는 60/70마다 약 4kg의 재료를 처리해야 합니다.") 생산 속도를 최적화합니다. 제품 품질을 보장하기 위해 플라스틱 성형에서 사이클 타임은 기본입니다. 코봇 (cobot) 은 적용이 일정한 속도와 압력으로 진행되도록 보장합니다. "
Claudio Marcassa, LEM Optical Business Development Manager and co-owner코봇 자동화 (cobot automation) 가 없었다면 업계의 경쟁적 압력을 유지하거나 고객에게 필요한 맞춤형 서비스를 제공할 수 없었을 것입니다.
04 - 장점
안경 분야의 자동화 수준은 여전히 낮습니다. 많은 작업이 수동으로 수행됩니다. 협업 로봇의 사용으로 LEM은 인력 관리에서 지속적인 생산성과 더 큰 합리성을 달성하고 고객이 요청한 수많은 사용자 정의를 제공할 수 있게 되었으며, 이는 수동으로 달성하기는 불가능했을 것입니다. 또한 코봇 (cobots) 을 통해 회사는 일부 전략적 프로세스를 최적화하여 생산성과 최종 품질을 높일 수 있었습니다.







비즈니스를 자동화할 준비가 되셨나요?
지금 자동화 전문가와 상담하세요!
유니버설 로봇과 연락하세요
수천 개의 기업이 협동 로봇을 활용하여...
- 생산성 향상
- 변화하는 제품 수요에 적응
- 직원 복지 및 유지 개선
- 노동력 부족 문제 해결