

사출 성형기는 다목적 코봇 (cobots) 을 배치하여 생산성을 400% 향상시킵니다.
요약하자면
적층 트레이, 컨베이어에서 부품 피킹 및 텐딩 기계는 많은 지루한 작업 중 일부일 뿐입니다. AIM Processing 은 이제 UR (Universal Robots) 핸들링의 협업 로봇을 보유하고 있습니다. 인력 부족에 직면한 콜로라도 사출 성형기는 워크 스테이션 간에 신속하게 이동하여 혼합/저용량 환경에서 수많은 작업을 처리할 수 있는 다목적 자동화 솔루션을 원했습니다. 정답은 Flexx Reference가 장착된 UR5e cobot 모바일 플랫폼이었습니다. 이 기능은 cobot 용도를 단 몇 분 만에 변경하여 15주 미만의 투자 회수로 생산성을 4배 향상시킵니다.
비즈니스 혁신 AIM Processing 은
다양한 산업 분야의 100개 이상의 고객을 위해 1300개 이상의 다양한 부품을 생산합니다. 오너인 존 겔스턴 (Jon Gelston) 은 "이곳은 하루하루가 새롭고 오랫동안 생산 가동이 거의 이루어지지 않습니다." 라고 말합니다. 존 겔스턴은 극도로 부족한 노동 시장에 직면하기도 했습니다. 다목적 모듈식 자동화 솔루션을 찾기 시작한 Gelston은 "이로 인해 자동화를 조사하고 생산량을 늘리고 비용을 제어할 수 있는 방법을 찾게 되었습니다." 라고 말합니다. 그의 팀은 몇 년 전 무역 박람회에서 유니버설 로봇 (Universal Robots) 을 만났습니다. "그것은 우리 환경에서 일할 잠재력을 가진 무언가로 우리를 강타했습니다." 라고 AIM Processing 소유자는 말합니다. 그는 앞서서 UR5e cobot 을 구입했습니다.
AIM Processing
Jon Gelston, Owner, AIM Processing첫 적용부터 cobot 은 생산성 향상 측면에서 우리의 기대치를 훨씬 뛰어넘었습니다.
애플리케이션 간 cobot 이동에 도전
Gelston은 "일단 로봇을 가동하고 실행한 후에는 정말 아름다웠고, 애플리케이션 간에 로봇을 이동시키고 싶었습니다." 라고 말합니다. "그러나 다음 번에는 로봇이 자유 공간에서 이동하는 웨이포인트를 재교육하기 위해 필요한 모든 시간을 설정하는 것이 어려웠습니다." 라고 그는 설명하면서 어떤 지점에서 0.5mm까지의 정확도가 필요하다고 강조합니다. "한 번 작동하는 것을 얻는 것은 한 가지이지만, 전용 생산 라인과 UR5e 가 정확한 위치에 고정되어 있지 않다면 어떻게 다시 설정할 수 있을까요?"

어플리케이션 프로그램
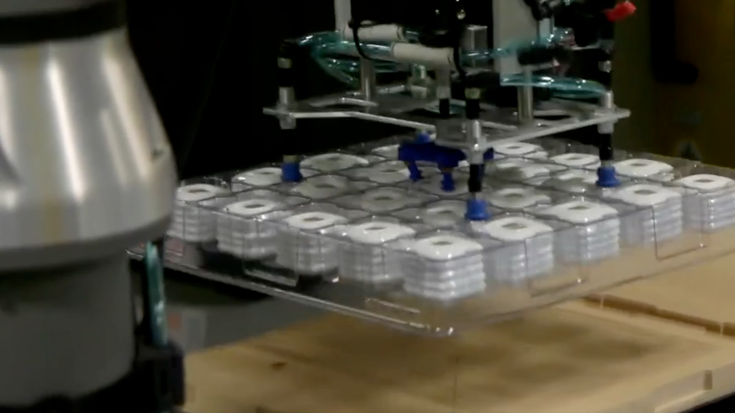
예를 들어, 응용 프로그램 중 하나는 UR5e 피킹 및 트레이에 작은 부품을 팔레트 화하여 트레이의 구획으로 만드는 직교 로봇 앞에 트레이를 배치합니다. 로봇의 위치가 여전히 약간 떨어져 있어 전체 애플리케이션이 동기화되지 않을 수 있기 때문에 회사는 이전에 동일한 애플리케이션에 사용된 저장된 프로그램을 단순히 시작할 수 없었습니다.

방문 평가에서 드러난 사실
이 회사는 현지 UR cobot 유통업체인 In-Position Technologies 의 영업 엔지니어인 Seth Leinbach를 불러 Gelston과 함께 공장 방문을 진행했습니다. Leinbach는 "우리는 여러 응용 분야를 검토했지만 전용 로봇 셀을 정당화하기에 충분한 양이 없었습니다." 라고 말합니다. “Jon은 또한 로봇의 용도 변경 방법과 UR의 좌표 시스템을 사출 성형 기계에 매칭하는 방법에 대한 질문이 많았으며, 곧바로 Flexx Reference 라는 Flexxbotics의 UR + 솔루션에 딱 맞는 솔루션이라고 생각했습니다.” Flexxbotics

Flexx 참조 솔루션
Cobot 이 애플리케이션으로 돌아갈 때마다 정확히 동일한 위치에 있는지 확인하기 위해, AIM Processing 은 Flexxbotics 의 Flexx Reference 솔루션을 사용하고 있습니다. 6도 기계적 결합 시스템인 Flexx Reference의 락아웃 어셈블리에 코봇 (cobot) 을 배치할 때, 시스템은 코봇의 티치 펜던트에 있는 Flexx Reference 소프트웨어의 버튼을 클릭하면 cobot 좌표를 캡처합니다. 그런 다음 모든 코봇 (cobot) 의 프로그래밍된 웨이포인트와 공간에서의 이동이 락아웃 어셈블리의 캡처된 위치에 대해 업데이트됩니다. 이제 사용자는 cobot 잠금을 해제하고 포지션을 다시 시작할 필요 없이 프로그램을 시작할 수 있습니다.







4배의 생산성 증가
회사의 첫 번째 cobot 배포 이후, AIM Processing 은 UR5e 경향 사출 성형 기계, 스택 트레이 및 컨베이어에서 부품을 추출하는 등 12 개 이상의 특정 응용 분야를 출시했습니다. 첫 번째 목표는 팔레타이징 카르테시안 로봇의 트레이 피킹 및 배치를 자동화하는 것이었습니다. 이전에는 90초마다 한 사람이 앉아서 몇 초 동안 트레이를 움직이기를 기다리는 활동이었습니다.
“이 작업을 자동화하는 것의 이점은 명백한 노동 회피만이 아니었습니다. 이제 주당 40시간이 아닌 연중무휴 24시간 작동으로 훨씬 더 높은 용량과 처리량으로 기계를 실행할 수 있습니다. 이는 기본적으로 생산 생산성을 4배 증가시켰습니다." 라고 Gelston은 말합니다. 또 다른 이점은 일관성입니다. "파트 생산량 측면에서 사이클 시간은 두 번째와 정확히 동일하여 일관된 제품으로 이어집니다."

15주 이내 ROI
존 겔스턴 (Jon Gelston) 은 종종 UR5e 코봇 (cobot) 에 대해 얼마를 지불했는지, 그리고 더 중요한 것은 얼마나 빨리 갚을 것인지 묻습니다. "내 반응은 항상 사용하지 않으면 갚지 않는다는 것입니다." 라고 그는 모듈식 배포가 어떻게 ROI를 실현하는 데 실제로 도움이 되었는지 강조합니다.
"다양한 기간 동안 다양한 부품을 실행할 때의 불확실성 중 일부는 투자 회수 (payback) 를 계산하는 측면에서 어렵습니다. 하지만 제가 말씀드릴 수 있는 것은 첫 번째 응용 프로그램에서 다섯 번째로 로봇을 실행한 후 로봇 자체에 대한 비용을 지불했다는 것입니다. 즉, 15주 이내에 ROI를 얻을 수 있었습니다." 라고 자동화가 필요한 곳마다 공장 현장을 로밍하기 위해 두 번째 UR5e 를 배포한 AIM Processing 소유자는 말합니다.

교육 및 UR Academy
AIM Processing 팀은 유니버설 로봇 (Universal Robots) 과 함께 일하기 전에 로직 흐름과 프로그래밍에 대한 기본적인 이해를 가지고 있었지만, 소유자 존 겔스턴 (Jon Gelston) 이 말했듯이 "로봇 프로그래밍에 대한 직접적인 경험은 거의 없다" 며 UR Academy 의 무료 온라인 부분을 통해 발견한 리소스를 강조했다. 그는 "비디오 및 읽기 형식의 셀프 트레이닝 모듈이 있었기 때문에 다양한 응용 프로그램에 도움이 되는 응용 프로그램 및 절차 개선 측면에서 찾고 배울 수 있었습니다." 라고 인정합니다. "우리의 첫 번째 응용 프로그램은 아마도 지금 우리의 표준에 따르면 매우 복잡하지는 않았지만 당시에는 그렇게 느껴졌습니다. Gelston은" UR 교육 데이터베이스 및 지원 사이트와 부가가치 리셀러 및 애드온 구성 요소로 구성된 Universal Robots 커뮤니티에서 찾은 리소스를 활용함으로써 이 프로젝트가 큰 성공을 거둘 수 있었습니다. "라고 말합니다.


사용된 UR + 제품
해결된 자동화 과제:
애플리케이션 간에 코봇 (cobots) 을 쉽게 이동할 수 있는 기능 그리퍼 및 비전 카메라와 같은 주변 장치와 쉽게 연결할 수 있는 기능 대량/저용량 생산 자동화 기능
핵심 가치 동인:
15주 만에 400% 생산성 향상 ROI 제품 품질 향상
협동 로봇이 해결하는 과제
데카르트 로봇과 인터페이스하여 완성품이 담긴 트레이를 골라 배치합니다. 컨베이어에서 부품의 비전 유도 피킹.
유니버설 로봇과 연락하세요
수천 개의 기업이 협동 로봇을 활용하여...
- 생산성 향상
- 변화하는 제품 수요에 적응
- 직원 복지 및 유지 개선
- 노동력 부족 문제 해결