Confira neste artigo uma comparação entre as garras pneumáticas e hidráulicas para entender qual se adequa melhor ao seu robô colaborativo.
Comparação entre garras robóticas: garra pneumática vs garra hidráulica

Garras pneumáticas e hidráulicas estão entre as mais populares garras (junto com a servo-elétrica). Caso esteja se perguntando qual a melhor para sua aplicação, pneumática ou hidráulica, este artigo é para você. Aqui, iremos comparar o design, performance e usabilidade da garra pneumática e da hidráulica.
Contudo, um breve spoiler: essa é uma batalha com resultado certo. Para aplicações de robótica colaborativa, as garras pneumáticas são a escolha certa.
Descubra abaixo o porquê.
O que é uma garra hidráulica?
Garras hidráulicas são garras para trabalho intenso que normalmente aplicam forças necessárias para levantar itens pesados (com mais de 50 quilos).
Como funciona uma garra hidráulica?
Garras hidráulicas usam fluidos pressurizados para mover um pistão. Quando o pistão se move, isso transfere força para a garra, abrindo e fechando.
O que é uma garra pneumática e como funciona?
Garras pneumáticas usam pressão de um sistema de ar comprimido para fornecer a energia necessária para mover o pistão interno, permitindo a abertura e fechamento dos dedos pneumáticos (também chamados de “jaws”).
Mecanismos de garras pneumáticas não contém motores ou engrenagens, o que deixa mais fácil a transferência de energia do pistão/cilindro para a força da garra em si.
Como a maioria das manufaturas já tem acesso a ar comprimido, o uso de garras pneumáticas é mais fácil e com melhor custo-benefício na implementação.
Uma das muitas vantagens das garras pneumáticas é que oferecem uma grande quantidade de força em um formato pequeno, leve e barato.
Além disso, são fáceis de manter: assim que são instaladas, podem funcionar por milhões de ciclos sem manutenção.
Qual a diferença entre a garra pneumática e a garra hidráulica?
Uma das principais razões para as garras hidráulicas raramente serem usadas em automação colaborativa é que as capacidades de carga raramente batem.
Por razões de segurança, facilidade de instalação, custo, mobilidade e impacto no chão de fábrica, robôs colaborativos são desenvolvidos para capacidades de carga abaixo da força de garras hidráulicas, ficando normalmente com cargas de até 16kg.
Por isso, para praticamente todas as aplicações desenvolvidas para robôs colaborativos, usar uma garra hidráulica seria um exagero muito caro.
Se você precisa levantar pesos de 500 kg, por exemplo, um robô industrial tradicional com garra hidráulica em uma célula de segurança podem resolver. Mas para os clientes da Universal Robots, as garras pneumáticas oferecem a densidade de energia adequada para aplicações como montagem, manuseio de material e alimentação de máquinas.
Além disso, como garras hidráulicas possuem pistões e partes com fluidos, sua manutenção é mais recorrente comparada às garras elétricas e pneumáticas. Não apenas, mas também é mais complexa, mais cara, e exige técnicos especializados para manter os níveis de óleo e reservatórios em dia.
Isso destaca outro aspecto importante para a preferência das garras pneumáticas para aplicações colaborativas: os robôs colaborativos são desenhados para operações por colaboradores sem experiência prévia.
Então, adicionar um sistema hidráulico complexo a um robô colaborativo aumentaria a dificuldade de uso média do sistema robótico em questão.
Como usam ar no lugar de fluidos líquidos, robôs de garras pneumáticas podem ser usados em salas esterilizadas. Em comparação, garras robóticas hidráulicas são muito problemáticas - em especial nos casos de falhas e vazamentos que afetam a célula de trabalho.
Por regra, a ANVISA não permite que produtos de automação com graxa ou fluidos inorgânicos integrem as linhas produtivas no segmento alimentício, já que os riscos de vazamento de produto tóxico no alimento estão presentes.
Em termos de custo, como dito anteriormente, as garras hidráulicas são muito mais caras que suas contrapartes pneumáticas.
Então, para quem escolhe os robôs colaborativos pelo baixo custo comparado à automação tradicional, não há sentido lógico em escolher uma garra cujo valor pode ser facilmente maior que do robô em si.
Conclusão
Garras pneumáticas vencem essa comparação, mas elas também possuem suas limitações. Por exemplo: por conta da necessidade de ar pressurizado, o controle de força não é tão preciso quanto em garras elétricas.
Garantir um aperto delicado também pode ser um desafio para sistemas pneumáticos, pois o sistema tem dificuldades de controle a baixas pressões.
E se um suprimento de ar pressurizado externo é exigido, isso pode aumentar os custos de implementação. E enquanto muitas garras pneumáticas são utilizadas em salas esterilizadas, caso falhem, podem contaminar o ar dentro da célula de trabalho.
Por essas razões, alguns fabricantes optam por garras elétricas para manuseio de materiais nessas situações.
Modelos de garras robóticas pneumáticas na UR+
Vejamos abaixo alguns dos modelos disponíveis no ecossistema da UR+
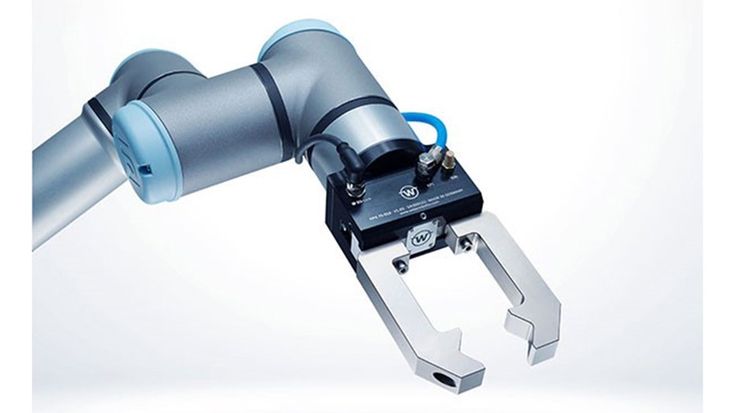
GRIPKIT-P Series da Weiss Robotics
O sistema da GRIPKIT-P contém tudo que os usuários finais precisam para montar linhas de manuseio de material, montagem e alimentação de máquinas em minutos. Se você precisa de processos dinâmicos e força de garra com dimensões compactas, as garras pneumáticas da Weiss Robotics (em design paralelo ou centralizado) são ideais.
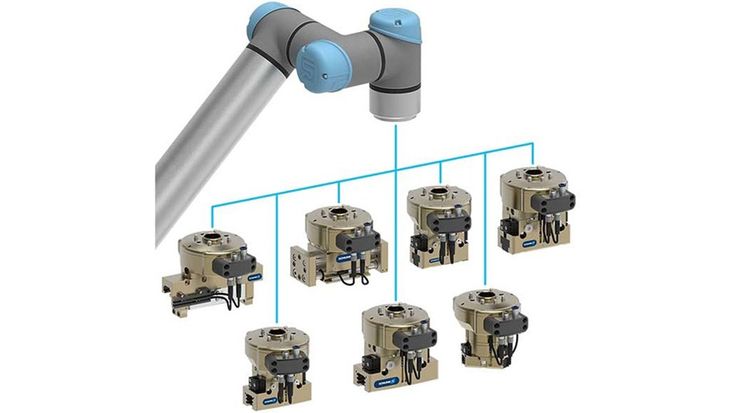
Garras robóticas da SCHUNK
A SCHUNK oferece uma grande variedade de garras pneumáticas certificadas pela Universal Robots no ecossistema da UR+. Por exemplo, a garra para pequenos componentes KGG 100-80 é uma garra estreita de dois dedos paralelos longo-curso, ideal para ambientes esterilizados.
Já a garra pneumática PSH 22 é uma garra de dois dedos paralelos ásperos desenhada para ambientes de trabalho contaminados.
E uma das mais populares garras desenvolvidas pela SCHUNK é a garra universal PGN-plus-P, uma garra de dois dedos paralelos com lubrificação permanente, alta força de aperto e momentos máximos elevados graças à orientação multi-dente. Essa garra é desenhada para peças em ambientes limpos a levemente contaminados.
Outra garra popular é a JGP, uma garra compacta de dois dedos paralelos com orientação em T. Essa garra é usada para muitas aplicações e ambientes, e pode ser instalada nos mesmos ambientes que a PGN-plus-P.
Por fim, para aplicações com temperatura especial, sujeira e resistência química, a Universal 3-Finger Centric Gripper é a escolha certa, além da alta força de aperto.
Garras robóticas do Zimmer Group
O Zimmer Group oferece uma grande variedade de garras pneumáticas certificadas pela Universal Robots, incluindo modelos de 2 dedos paralelos, 3 dedos concêntricos, 2 dedos angulares, interno, garras magnéticas e pinças de corte.
A série de garras oferece forças que vão de 30N para operações delicadas a mais de 2000N para aplicações de cargas pesadas.
A garra GPPP5000 de dois dedos paralela, por exemplo, combina força, longos dedos e proteção à corrosivos. Uma opção extra é o mecanismo de auto-trava, garantindo um aperto seguro mesmo no caso de queda de energia ou E-stop.
O Zimmer Group também desenvolveu uma série de “garras híbridas” para robôs colaborativos da Universal Robots que combinam características de garras elétricas e garras pneumáticas.
Enquanto a maioria dos sistemas de garras pneumáticas necessitam de válvulas externas para controlar o fluxo de ar na garra, o modelo da Zimmer vem com uma válvula integrada capaz de controlar o fluxo de ar.
E também vêm com sensores integrados que oferecem precisão de aproximadamente 0,05mm, além de permitir ao sistema da garra entender as forças aplicadas ao objeto manuseado.

A garra de 2 dedos paralelos GPPP5000IL e a garra de 3 dedos concêntricos GPD5000IL, por exemplo, são modelos robustos especialmente desenvolvidos para uso em ambientes exigentes.
Ambas vêm com o software URCap completamente integrado ao sistema de controle e programação, agilizando a instalação mesmo para colaboradores com pouca ou nenhuma experiência prévia com robótica.
Ambas as garras pneumáticas prometem até 30 milhões de ciclos sem exigirem manutenção e usam IO-Link para garantir comunicação bidirecional para process-data e service-data.

Esse foi apenas um resumo das soluções em garras robóticas disponíveis para os robôs colaborativos da Universal Robots. Caso queira saber mais sobre essas ferramentas, fale com nossa equipe de especialistas.
Escritório
- Universal Robots Brasil
- Rua José Versolato, nº 111
- 09750-730 São Bernardo do Campo - SP
Fale conosco: 0800 777 0442