安全平面
| 描述 |
定义安全平面仅限制定义的工具球体和弯头,而不是机器人手臂的总体限制。 定義安全平面並不能保證機器人手臂的其他部分會遵循此類限制。 |
| 配置安全平面 |
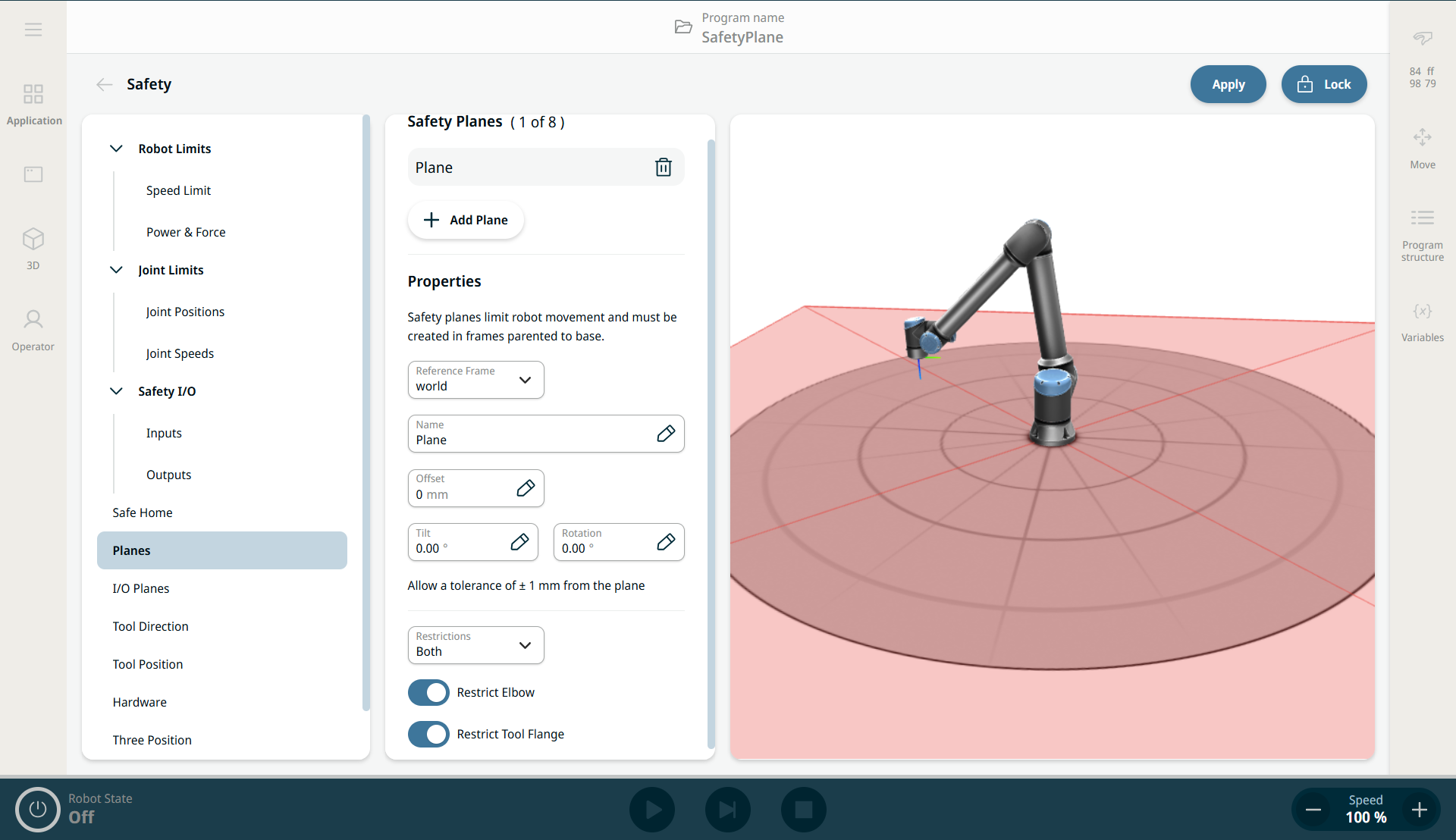
可使用下列屬性配置安全平面:
可使用下列限制配置每個平面:
|
| 肘部關節限制 |
依預設啟用此功能。 您可以使用「限制肘部」來防止機器人肘部關節通過您定義的任何平面。 禁用限制肘部,以使肘部穿过平面。
|
| 工具法蘭限制 |
限制工具法蘭可防止工具法蘭和連接的工具穿過安全平面。 當您限制工具法蘭時,非限制區是安全平面內的區,在該區域內的工具法蘭可正常操作。 工具法蘭不得越過安全平面外的限制區。 移除限制將讓工具法蘭超過安全平面,到達限制區域,而連接的工具仍會在安全平面內。 使用較大的工具偏移時,可移除工具法蘭限制。 這能讓工具的移動距離更大。 限制工具法蘭時需要建立平面特徵。 平面特徵用於稍後在安全設定中設定安全平面。
|