PROFIsafe
| 高级选项 |
发送到安全PLC的状态消息包含下表中的信息。
|
| 高级选项 |
|
| 高级选项 |
|
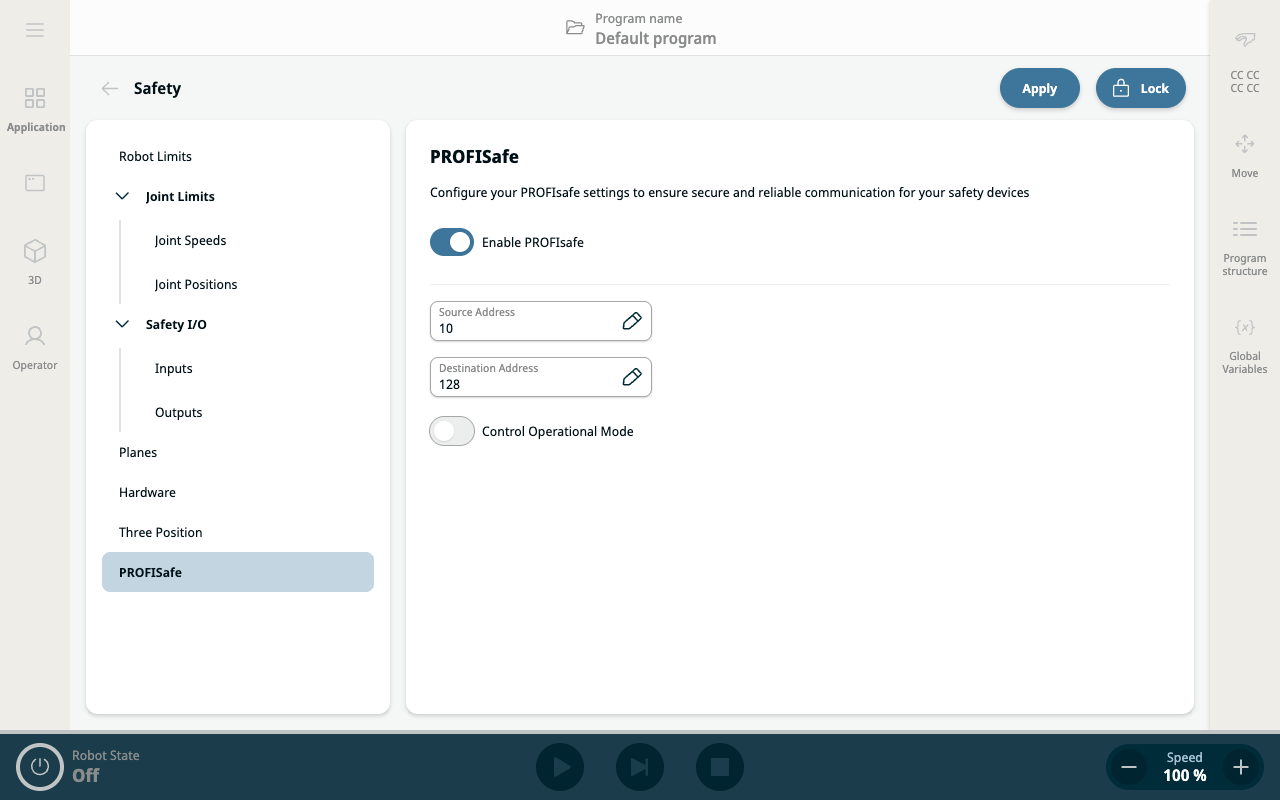
| 配置PROFIsafe |
|
|
|
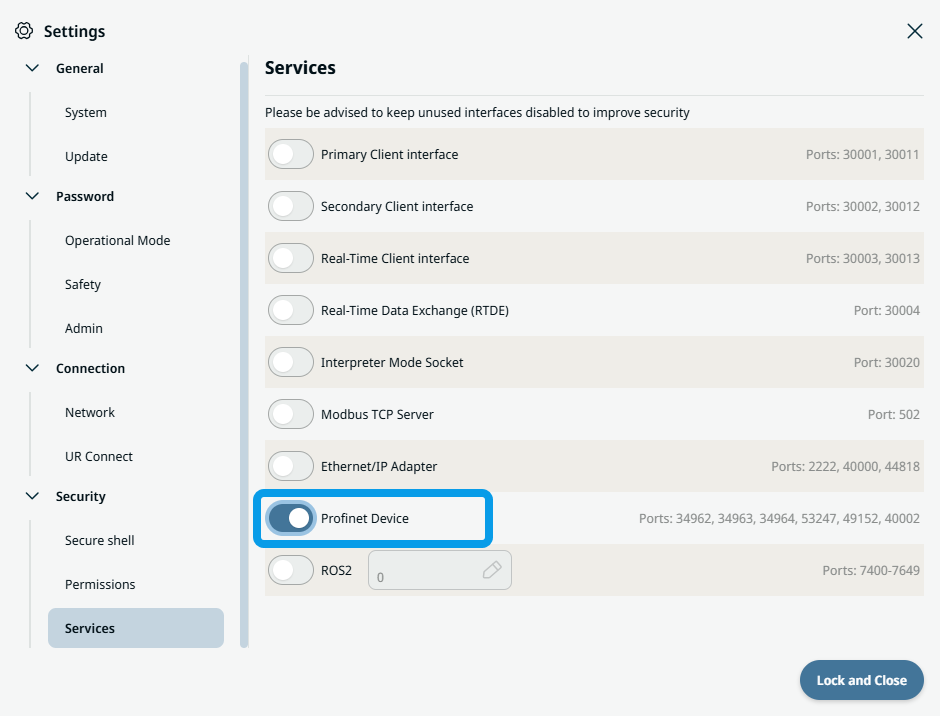
為配置和使用 PROFIsafe ,必須在安全服務設定選單中啟用 Profinet 裝置。
 若要了解詳細資訊和介面位置,請參閱 Profinet 章節。
|