基本程序节点: 移动
| 描述 |
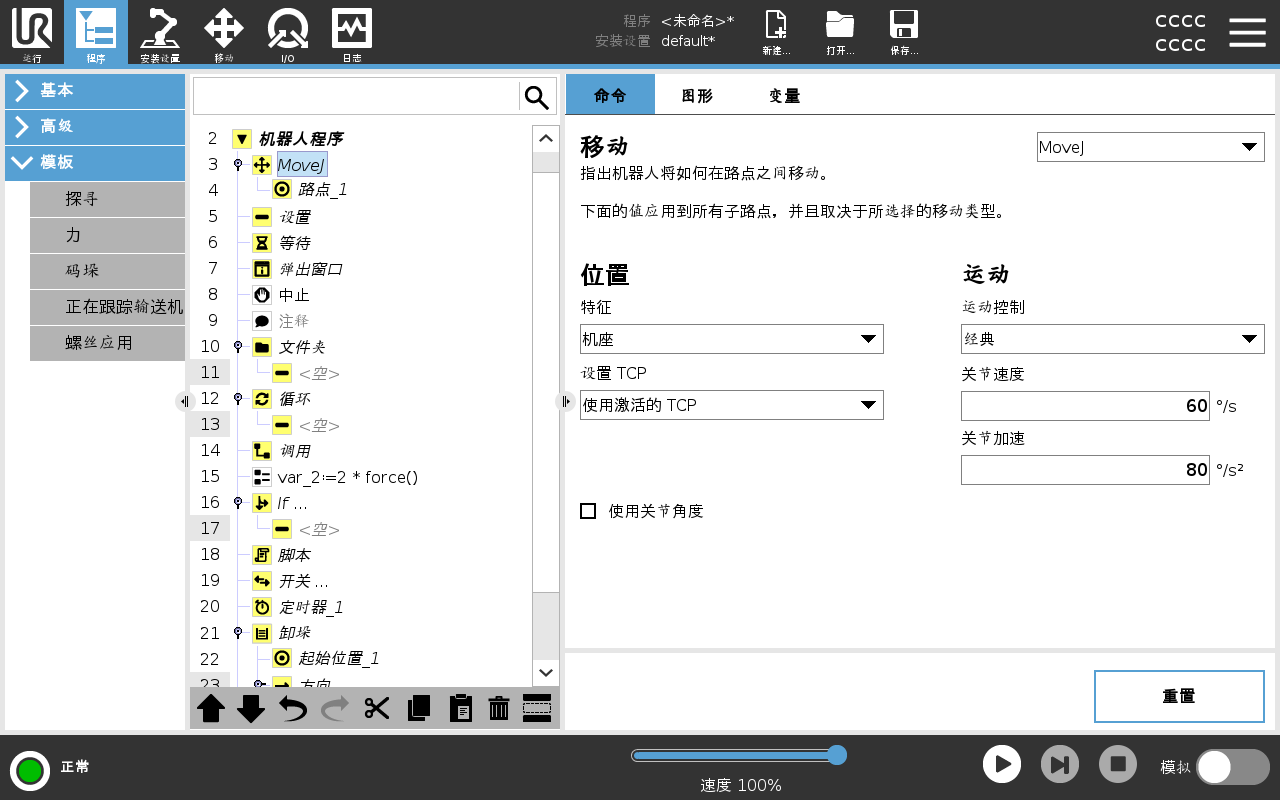
“移动”命令允许机器人从 A 点移动到 B 点。机器人的移动方式对于机器人正在执行的任务非常重要。 当您将“移动”添加到程序树时,“移动”窗格会出现在屏幕右侧。 “移动”窗格中的各种选项可用于配置“移动”和附加的路点。
|
| 速度设置 |
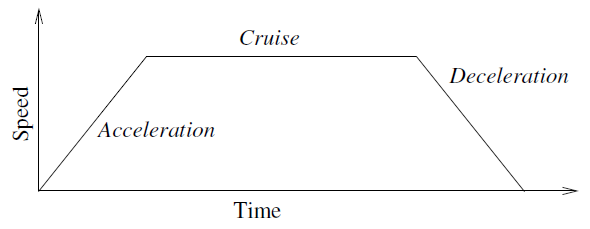
应用于运动类型的共享参数是最大关节速度和关节加速度。
|
|
OptiMove 是一种运动控制选项,用于指定机器人的速度和加速度,同时保持硬件限值。 这意味着机器人的最佳运动不会超过预期限值。 因此,100% 是硬件限值范围内的最大速度百分比和加速度。
|
| “移动”命令 |
当您向程序添加“移动”命令时,会自动添加路点。 您还可以使用“移动”命令来设置机械臂在路点之间移动的加速度和速度。
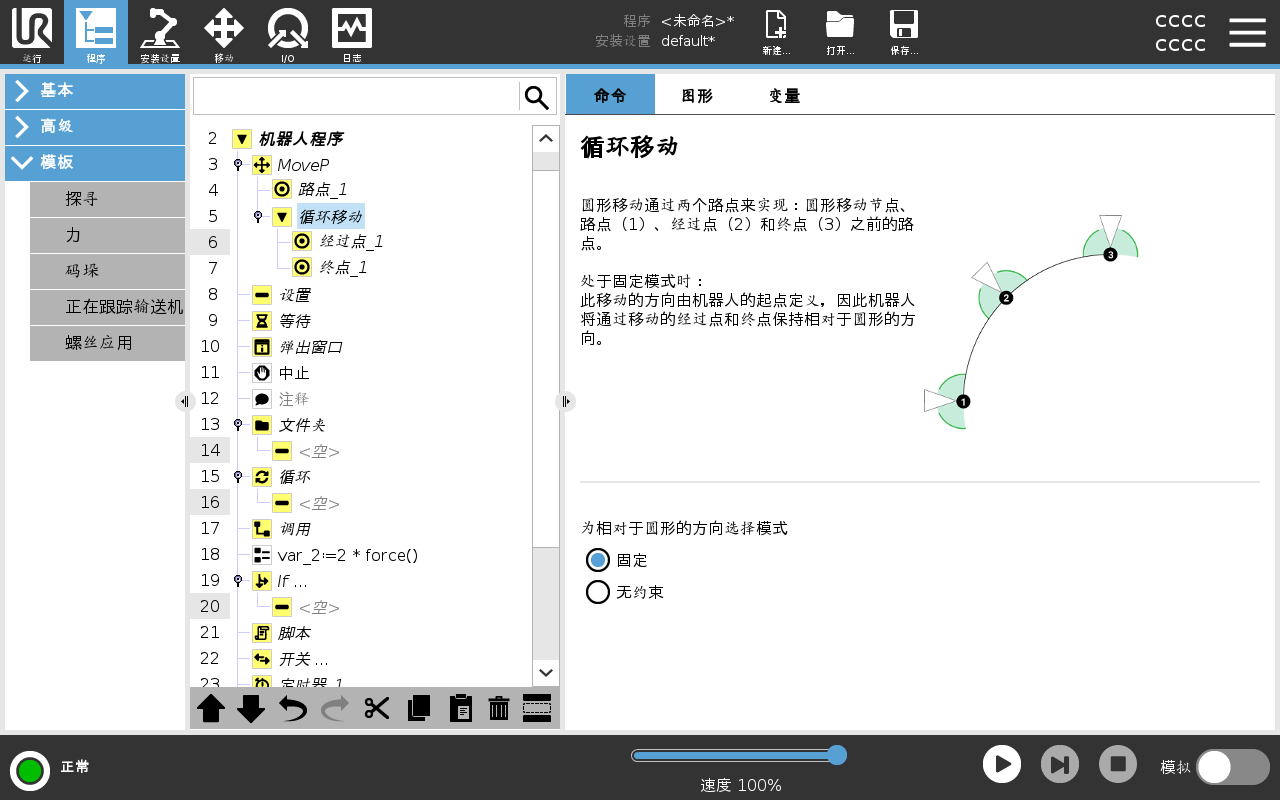
机器人使用四个“移动”命令进行移动,如以下小节所述:
|
|
使用 MoveJ 定义路点时,可以使用“使用关节角度”选项代替 3D 位姿。
当程序在机器人之间移动时,不会改变使用“使用关节角度”定义的路点。 如果您要在新机器人中安装程序,这会很有用。
使用“使用关节角度”会使 TCP 选项和特征不可用。 |
|
如果您需要在机器人程序执行期间更改 TCP,请使用此设置。 如果您需要在机器人程序中操作不同的对象,这会很有用。 机器人的移动方式会根据设为有效 TCP 的 TCP 进行调整。 忽略活动TCP 允许相对于工具法兰调整此移动。 |
|
| 在“移动”中设置 TCP |
|
|
此功能适用于设置路点的情况(请参阅特征)。
在以下情况下,可以使用特征: |
|
“移动”屏幕右下角的共享参数适用于从机械臂的上一个位置到命令下的第一个路点的移动,以及从该路点到每个后续每个路点的移动。 “移动”命令设置不适用于从“移动”命令下的最后一个路点开始的路径。
|