PolyScope X 概览
| 概览 |
PolyScope X 是安装在示教盒上的图形用户界面 (GUI),可以通过触摸屏来操作机械臂。 PolyScope X 界面可用于创建、加载和执行程序。 请务必将软件更新至最新版本。
|
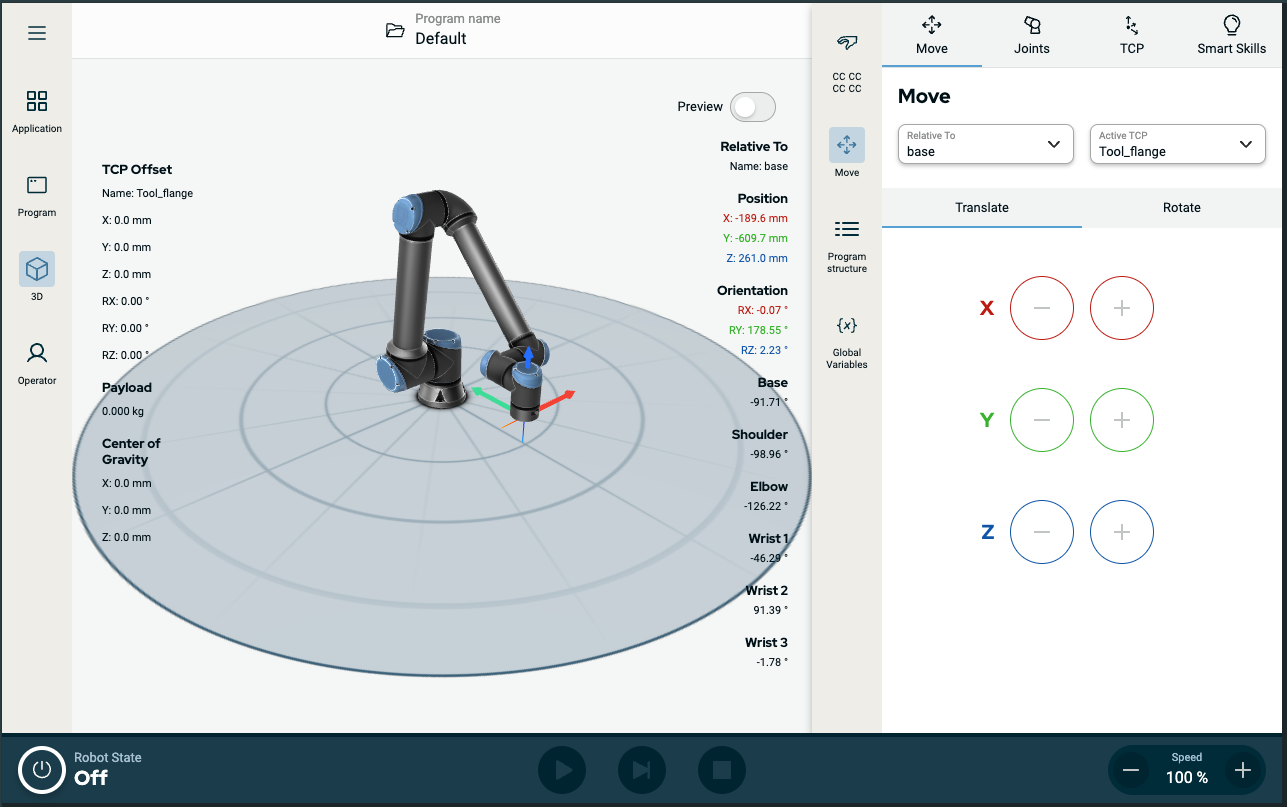
| 查看主屏幕 |
|
 。 这可以为您提供机械臂在 X-Y-Z 坐标下的三维视图。
。 这可以为您提供机械臂在 X-Y-Z 坐标下的三维视图。



|
屏幕 布局 |
PolyScope X GUI 分为下图所示的几个部分:
|

| 屏幕组合 |
主屏幕和多任务屏幕构成了机器人的操作屏幕组合。 多任务屏幕独立于主屏幕,因此您可以执行单独的任务。 例如,您可以在主屏幕中配置程序,同时在多任务屏幕中移动机械臂。 如果不需要,也可以隐藏多任务屏幕。
|
| 显示/隐藏多任务屏幕 |
|