Linearni premik
| Opis |
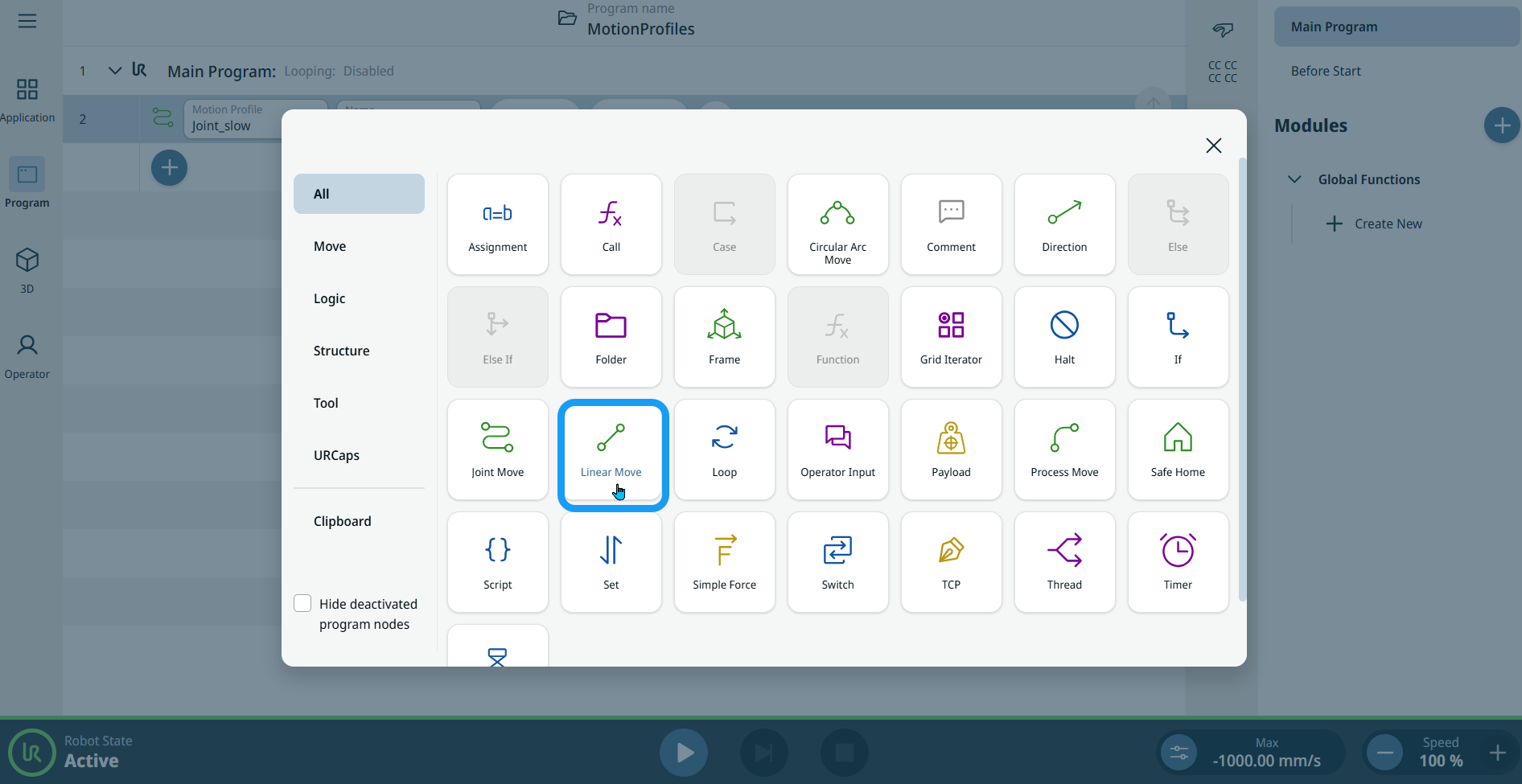
The Linear Move command node supports Motions Profiles as Joint Move, but it creates a movement that is a direct line from point A and point B. It moves the Tool Center Point (TCP) linearly between waypoints. To pomeni, da vsak spoj izvede bolj zapleteno gibanje, da orodje ostane na ravni poti.
|
|
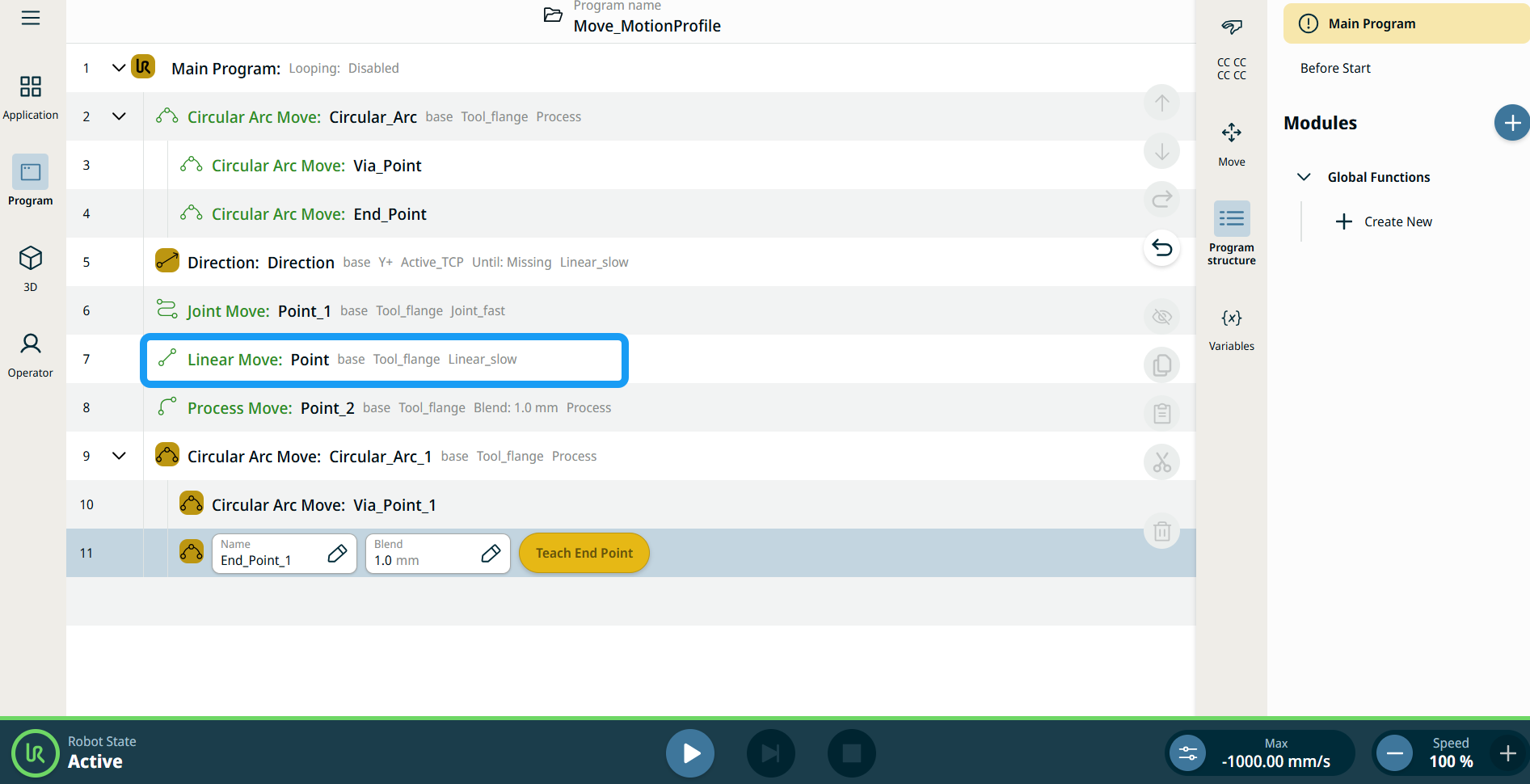
To access Linear Move command |
|
|
|
|
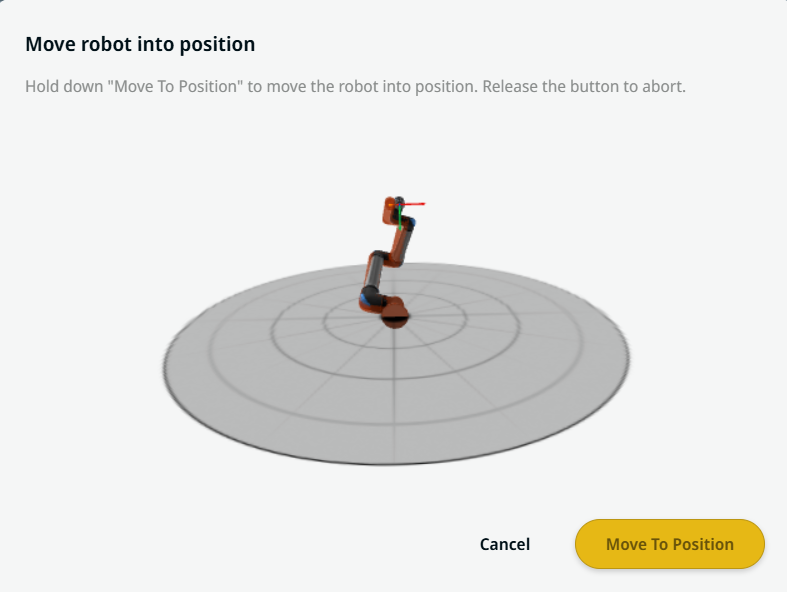
| Uporaba gumba Premik sem |
Gumb Premik sem je viden v ukazih Linearni premik in Premik člena. Ta funkcija vam omogoča, da se premaknete na smerno točko neposredno iz drevesa programa. S pritiskom gumba Premik sem se odpre pogovorno okno Premik robota v položaj. Gumb je viden, ko je bila naučena smerna točka, in je omogočen le, če je stanje robota v načinu Normalno ali Reducirano.
|

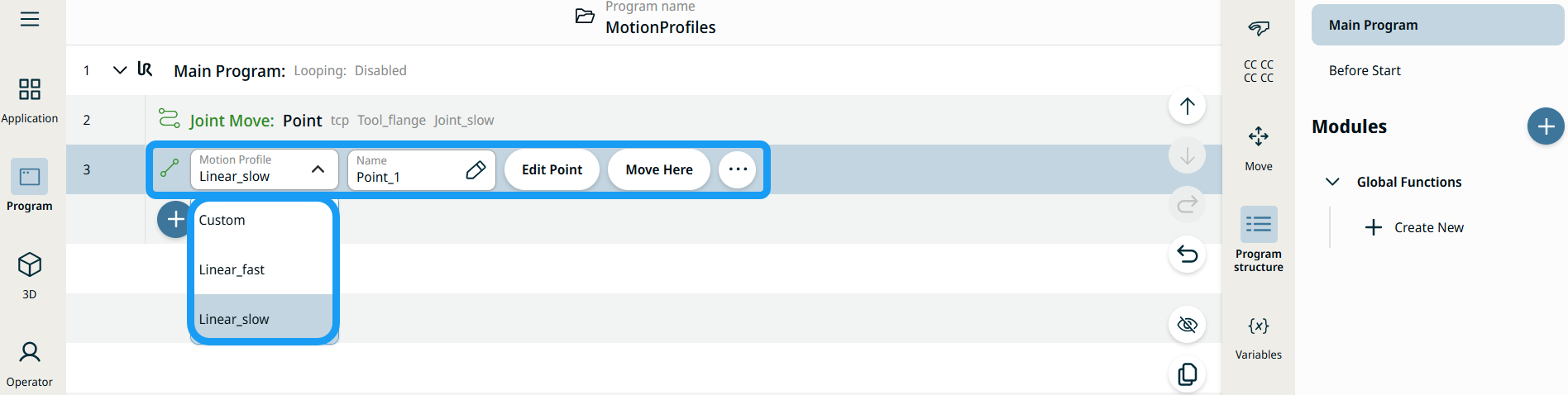
| Oznake profila premikanja na vozliščih premika |
Vsi ukazi, povezani s premikanjem v drevesu programa prikazujejo profil premika, povezan z vsakim vozliščem. Ta funkcija omogoča uporabnikom, da vidijo izbrani profil premikanja na vozlišču premika. Ta funkcija je implementirana na naslednjih ukaznih vozliščih: Vozlišča premika s profilom premikanja po meri bodo prikazala vrednosti za hitrost in pospešek namesto profila premikanja. |
|
|
|
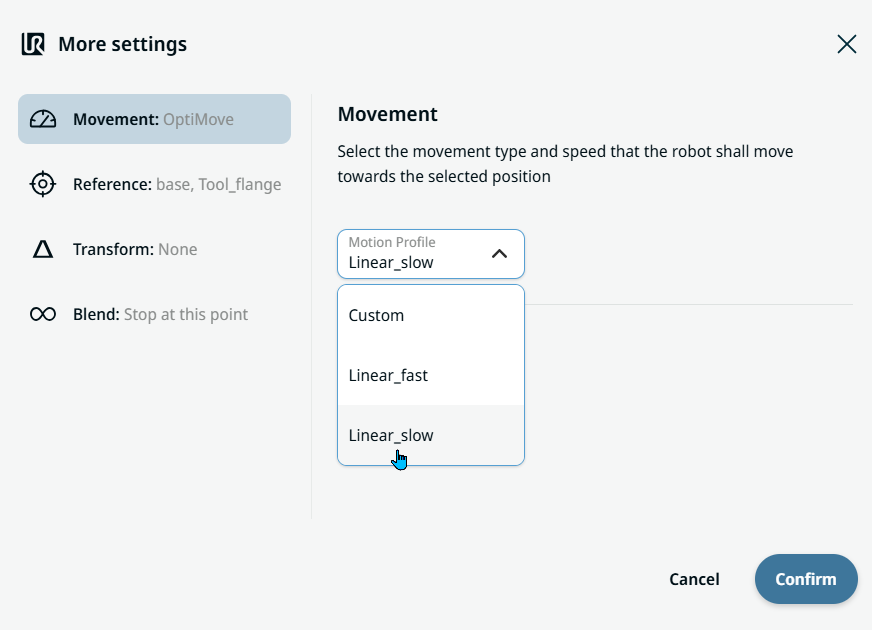
| Movement setting |
|
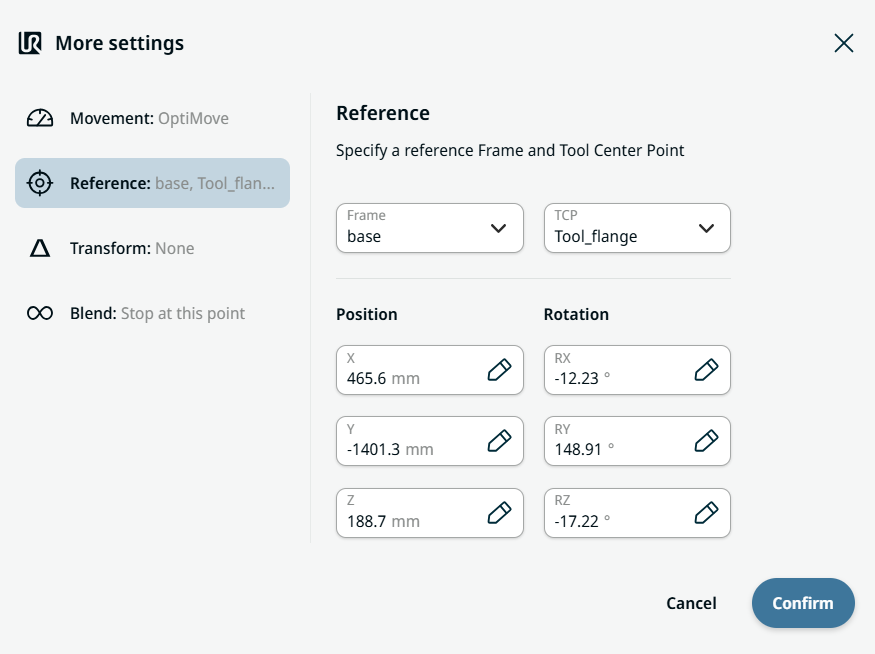
| Reference setting |
|
| Transform setting |
|
|
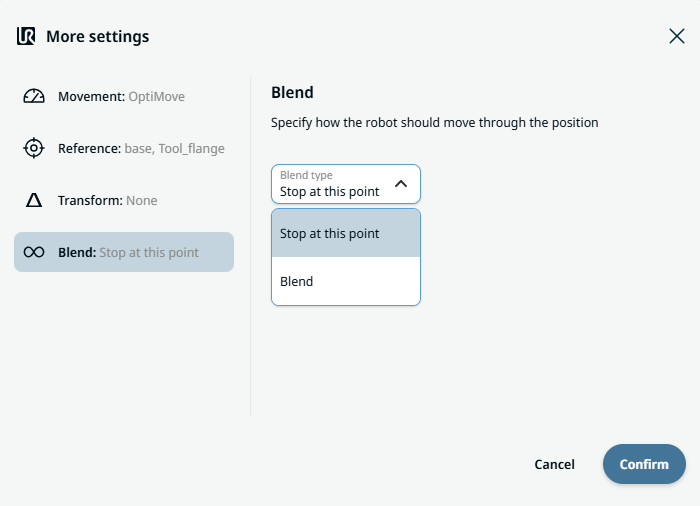
Blend setting |
|