PROFISafe
| Opis |
Omrežni protokol PROFIsafe (vgrajen v različici 2.6.1) omogoča robotu komunikacijo z varnostnim PLC v skladu z zahtevami standarda ISO 13849, kategorija 3, PLd. Robot pošilja varnostne informacije varnostnemu PLC-ju in prejema varnostne informacije. Komunikacija v zvezi z varnostjo lahko vključuje sporočila o stanju ali sprožitev varnostne funkcije (npr. zmanjšane nastavitve, zaustavitev). Ukazi za zaustavitev so opisani v skladu z IEC 60204-1, kjer je Zaustavitev v sili zaustavitev kategorije 1, varnostna zaustavitev pa zaustavitev kategorije 2.
Vmesnik PROFIsafe zagotavlja varno, omrežno alternativo povezovanju žic z varnostnimi IO zatiči krmilne omarice robota. Uporaba vmesnika PROFIsafe ohranja specifikacije funkcionalne varnosti robota UR (PL, kategorija in PFH). Za podrobnosti glejte poglavje »Tabela varnostnih funkcij« v priročniku UR. Na primer, »varnostni izklop« je kategorije PLd 3 z vrednostjo PFH manjšo od 1,8E-07 (1,8 x 10-7).
PROFIsafe je na voljo samo za robote, ki imajo omogočitveno licenco, ki jo lahko pridobite tako, da se obrnete na lokalnega prodajnega zastopnika. Ko pridobite licenco, jo prenesite na strani myUR. Za informacije o registraciji robota in aktivaciji licence si oglejte poglavje »Registracija robota in datoteke z licenco URCap«.
|
| Vhod varnostnega krmilnika PLC |
Statusno sporočilo, ki ga robot pošlje varnostnemu krmilniku PLC, vsebuje informacije, prikazane v naslednji tabeli.
|
||||||||||||||||
|
|
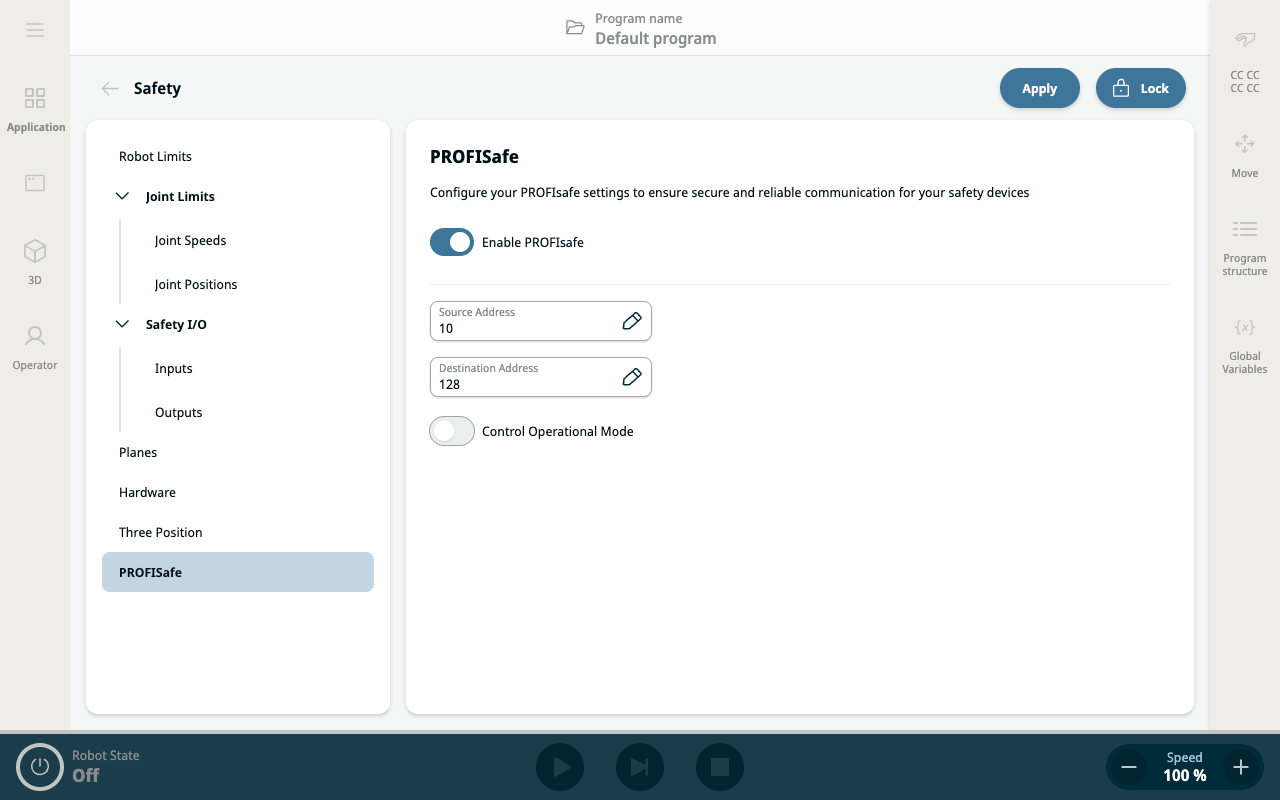
| Konfiguriranje PROFIsafe |
|
|
|
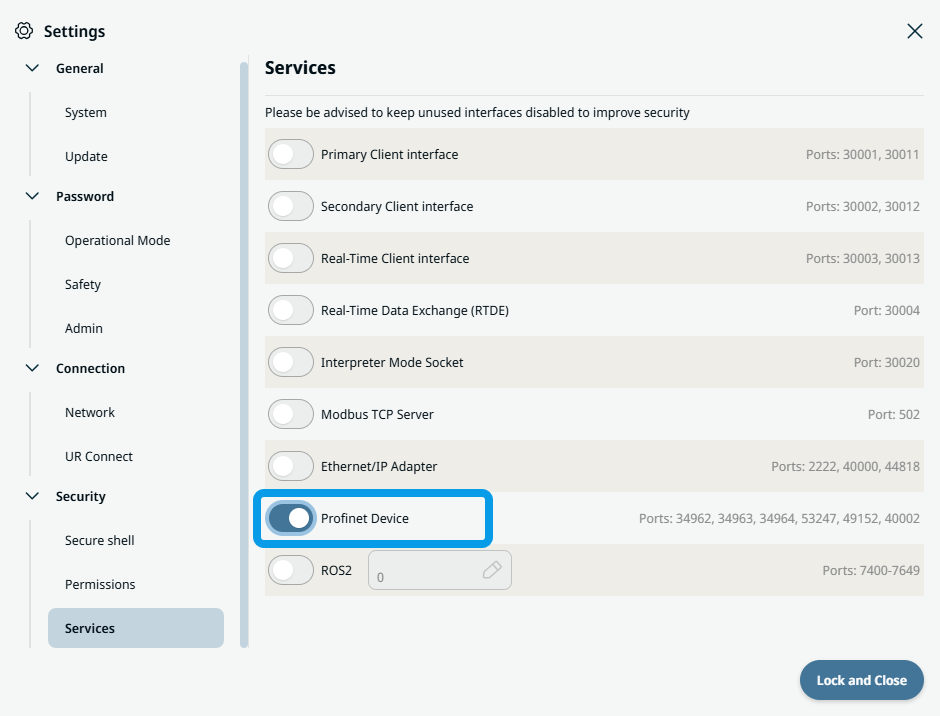
Če želite konfigurirati in uporabljati PROFIsafe, mora biti v meniju nastavitev varnostnih storitev omogočena možnost Naprava Profinet.
 Preberite podrobnosti in lokacijo vmesnika „Profinet“.
|