Bezpečné bývanie
| Popis |
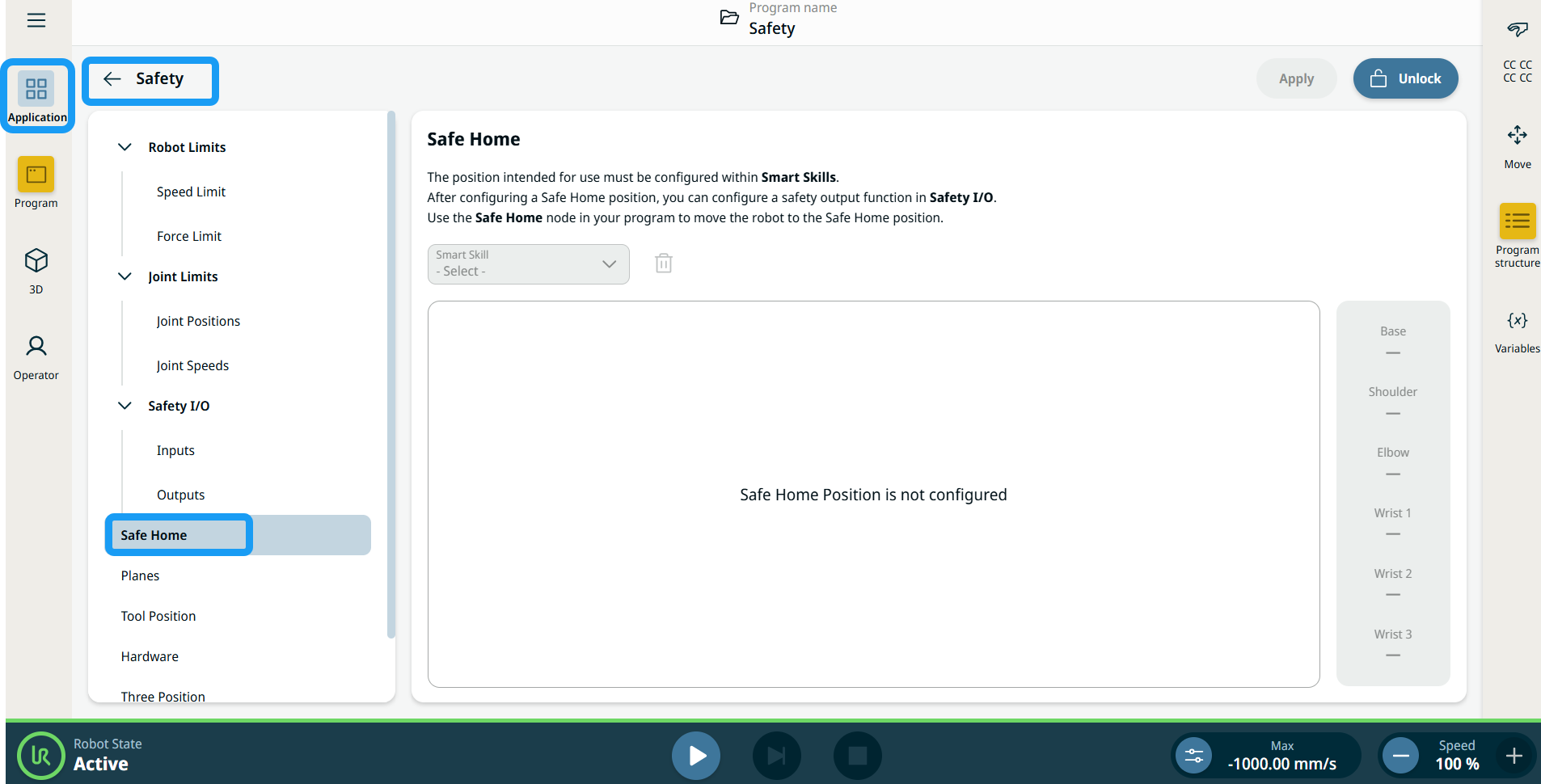
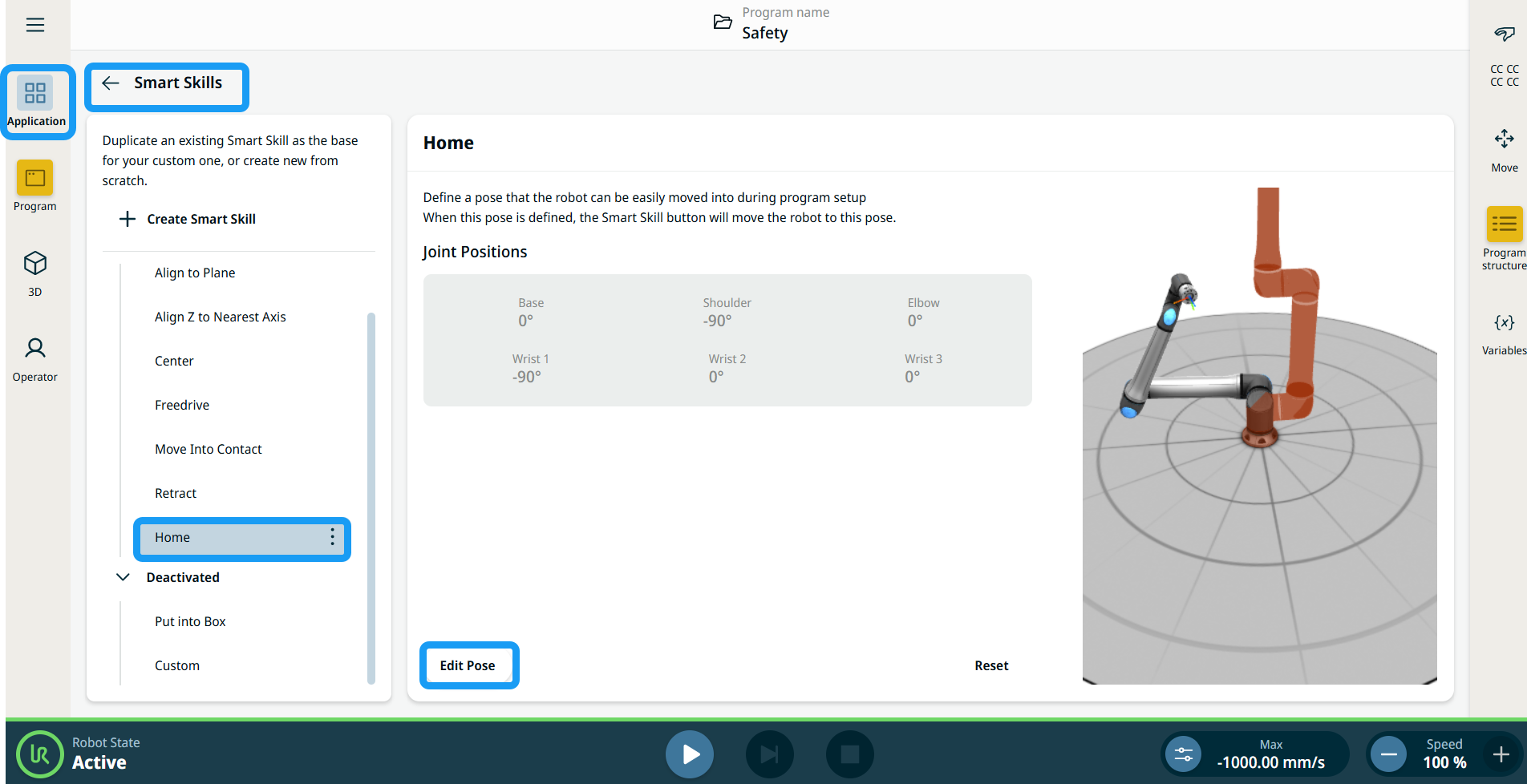
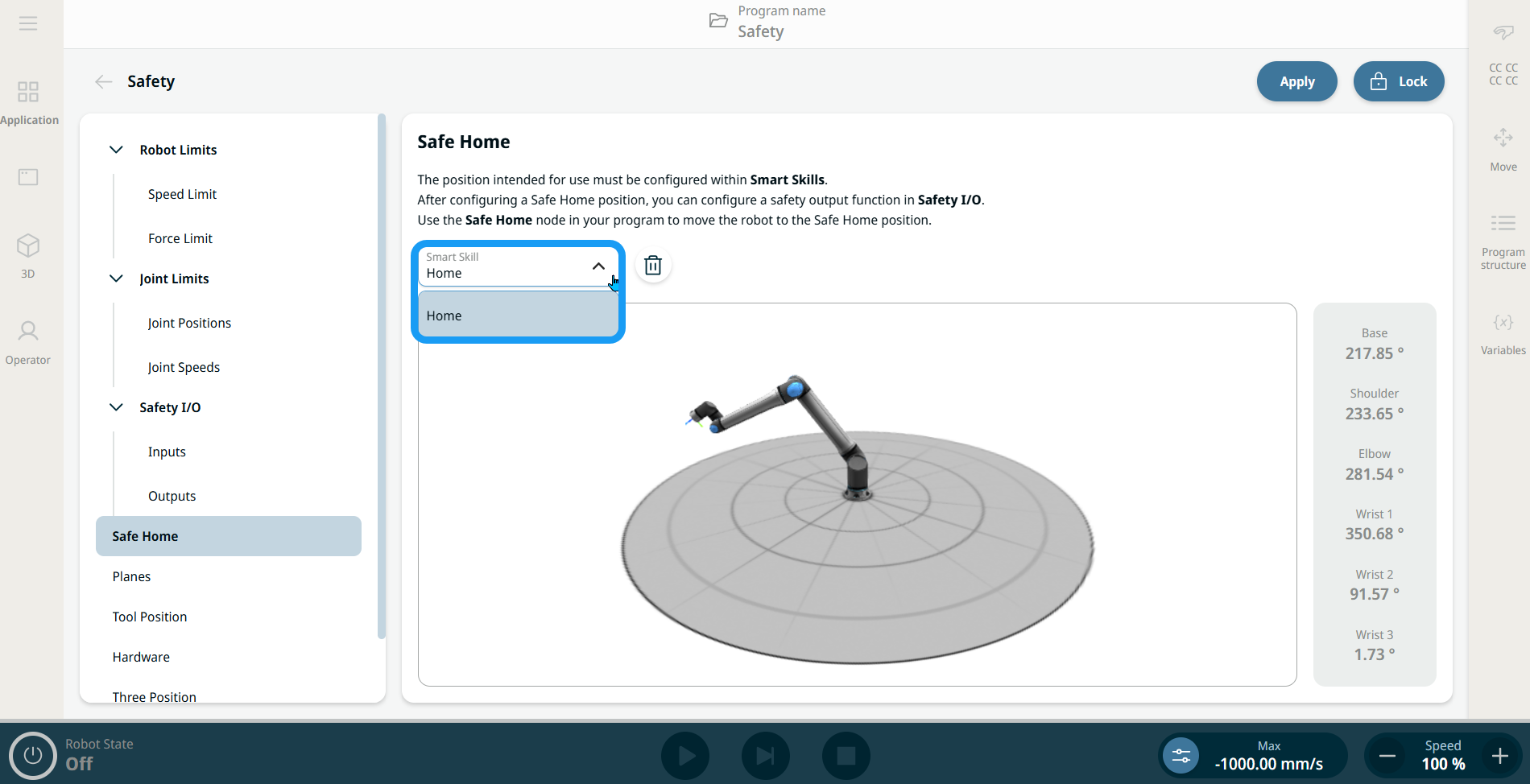
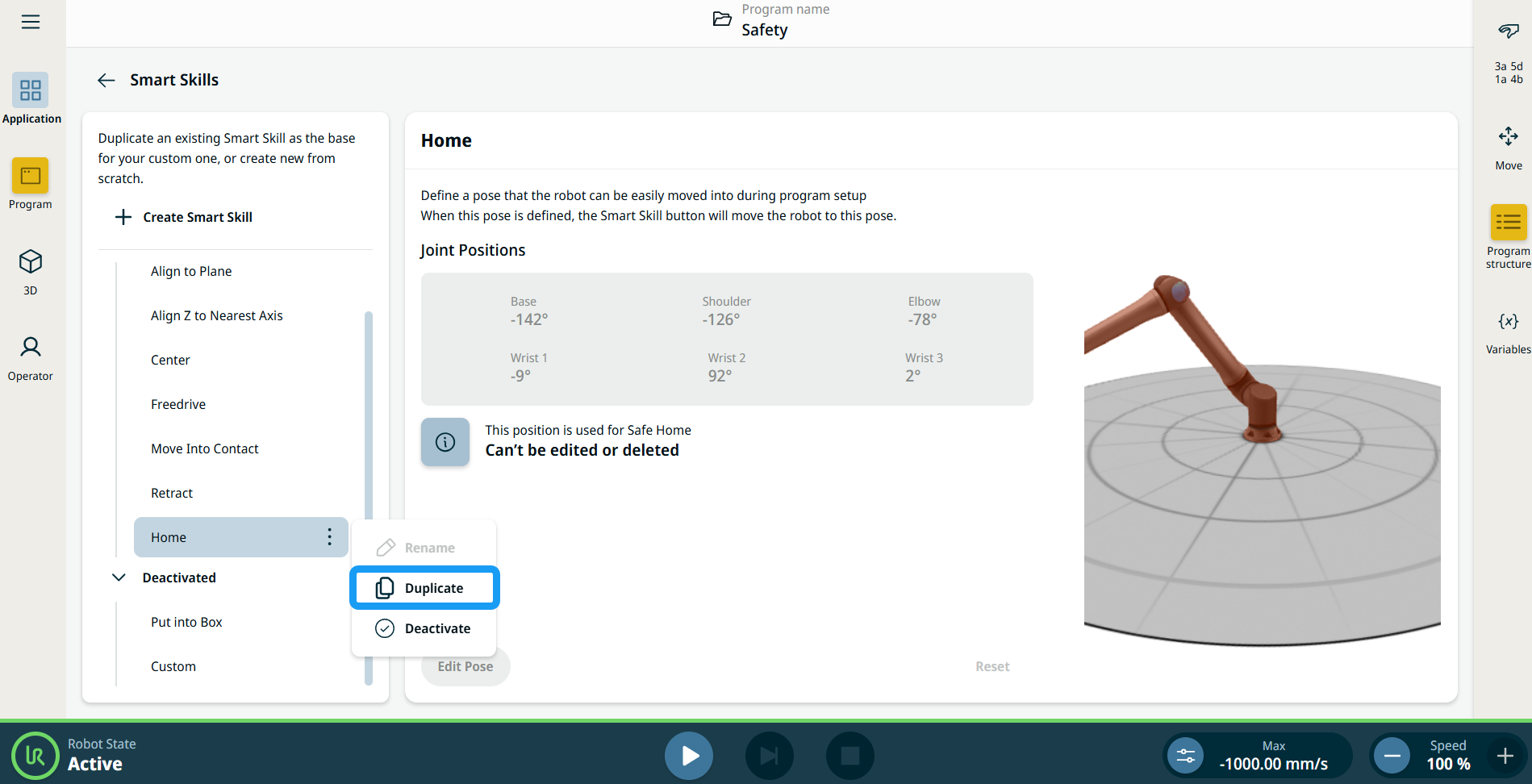
Bezpečná predvolená poloha je funkcia PolyScope X, ktorá umožňuje používateľom definovať bezpečnostný výstup, ktorý sa aktivuje, keď robot dosiahne nakonfigurovanú bezpečnú predvolenú polohu. Používateľ vyberie Domov v roletovej ponuke dostupných polôh inteligentných zručností, ktoré môžu byť priradené ako referenčné pre Bezpečnú predvolenú polohu.
|
|
Prístup k bezpečnej predvolenej polohe |
|
|
|
|
|
|
Ak je ako referenčná poloha pre Safe Home zvolená funkcia Position Smart Skill:
|
|
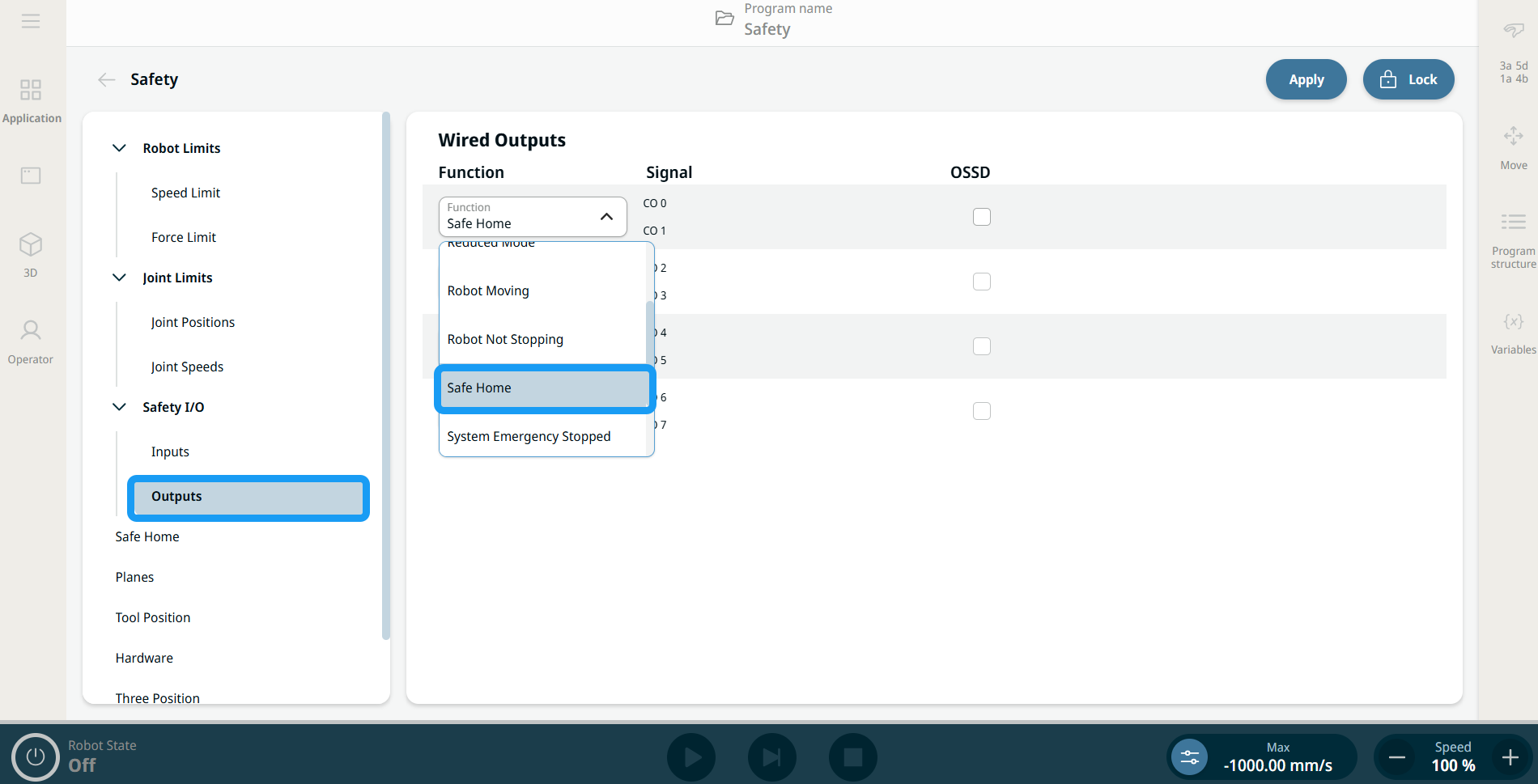
Funkcia bezpečnej predvolené polohy vo výstupoch |
Ak je poloha Domov priradená k inteligentnej zručnosti polohy v Bezpečnosť, rozbaľovací zoznam funkcií bezpečnostného výstupu obsahuje Bezpečnú predvolenú polohu ako nové priradenie funkcie. V poliach Funkcia v časti Výstupy v položke Bezpečnostné vstupy/výstupy vyberte položku Bezpečná predvolená poloha.
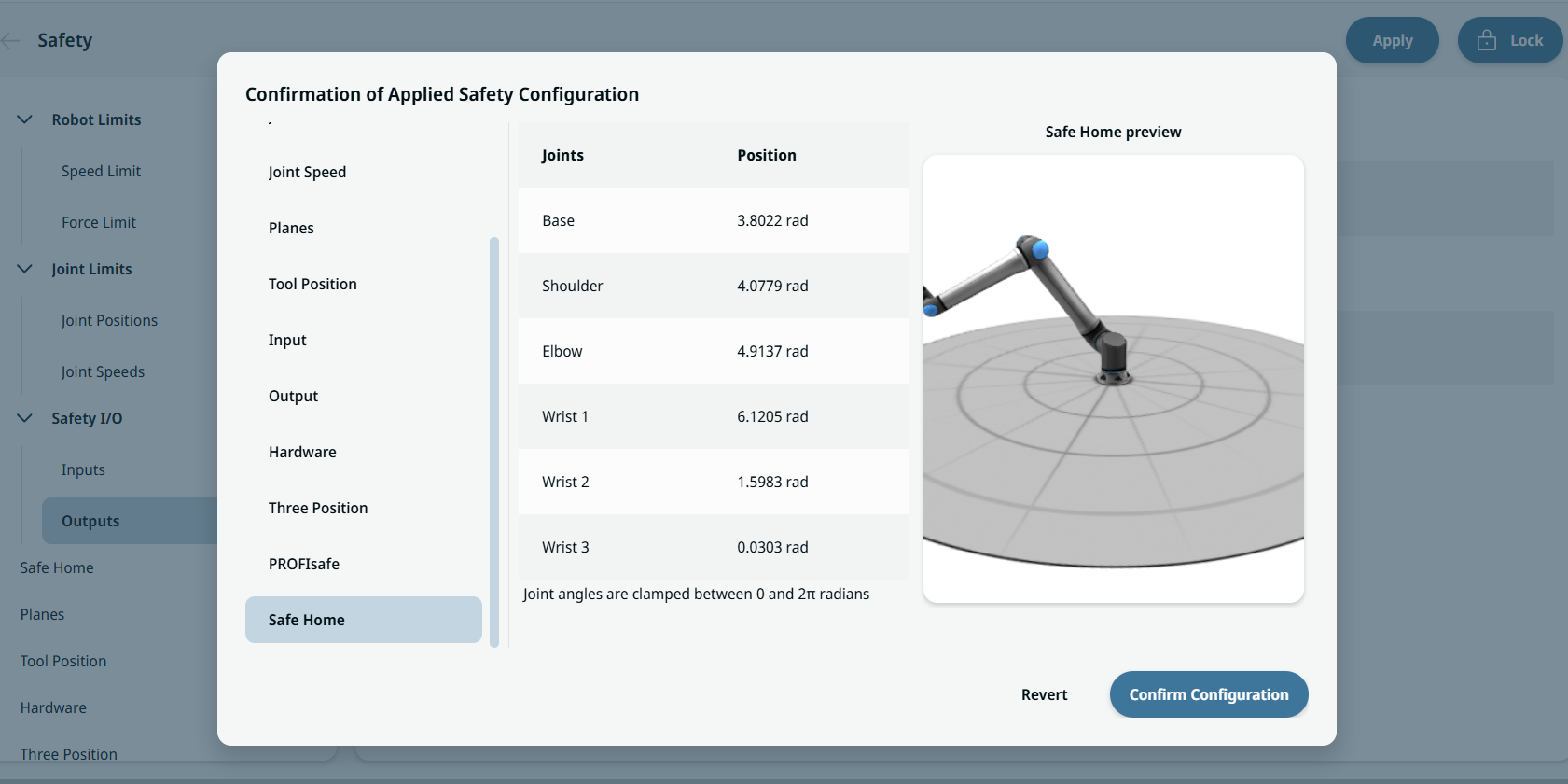
Bezpečnú predvolenú polohu môžete vidieť v tabuľke priradenia funkcií v dialógovom okne Potvrdenie použitej bezpečnostnej konfigurácie prehľadu.
|
|
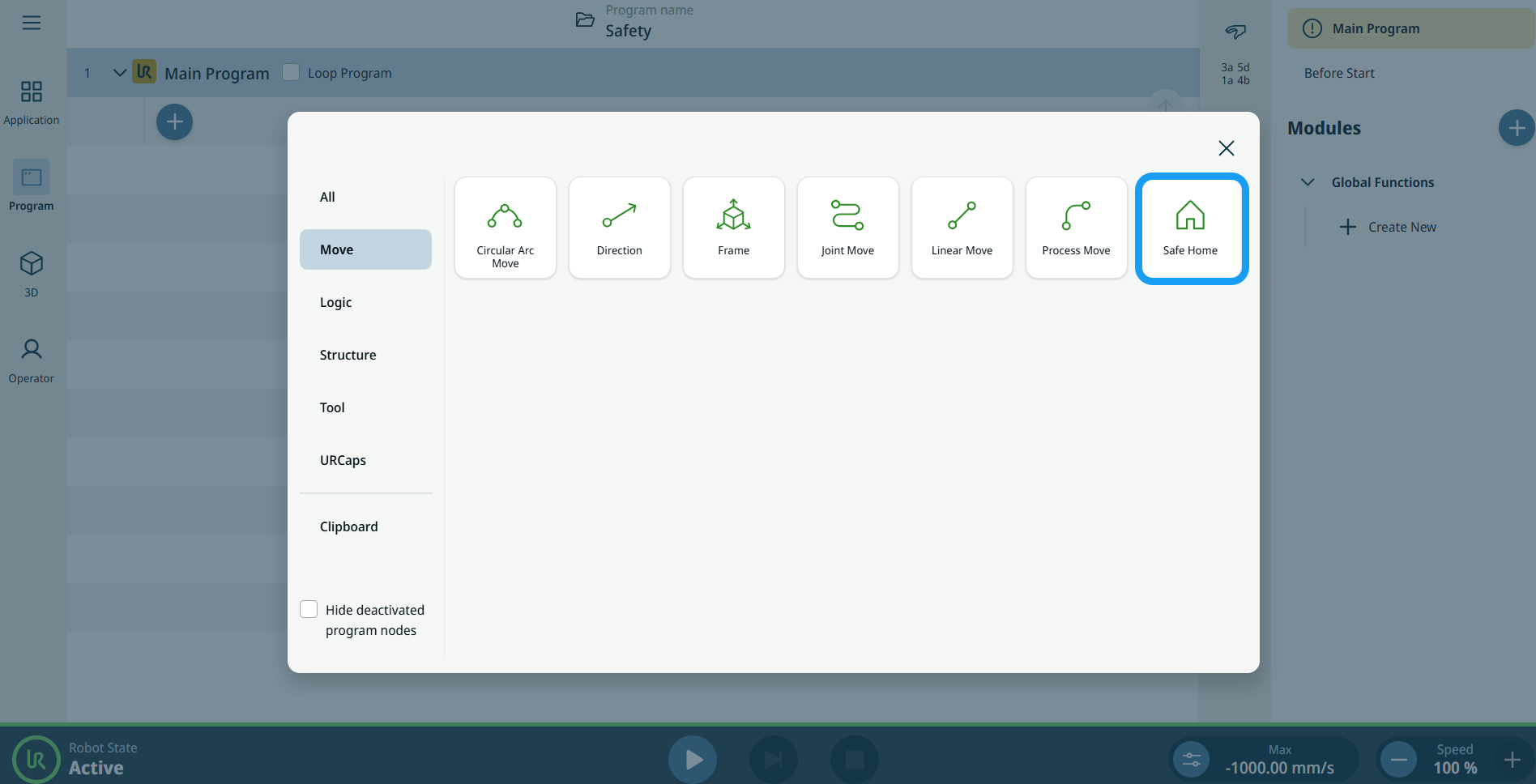
Bezpečná predvolená poloha ako uzol programu |
Programový uzol Bezpečná predvolená poloha sa nachádza v kategórii Pohybové uzly v rámci Príkazové uzly. Tento uzol sa používa na vydanie príkazu robota, aby sa presunul do svojej vopred definovanej Bezpečnej predvolenej polohy, ako je nakonfigurované v nastaveniach bezpečnostnej aplikácie pre Bezpečnú predvolenú polohu.
Pridanie uzla bez nakonfigurovanej bezpečnej predvolenej polohy označí uzol žltou farbou.

Príkazový uzol Bezpečná predvolená poloha má možnosti profilov pohybu a ďalšie pokročilé nastavenia, keď je stlačená ikona s tromi bodkami
|
 .
.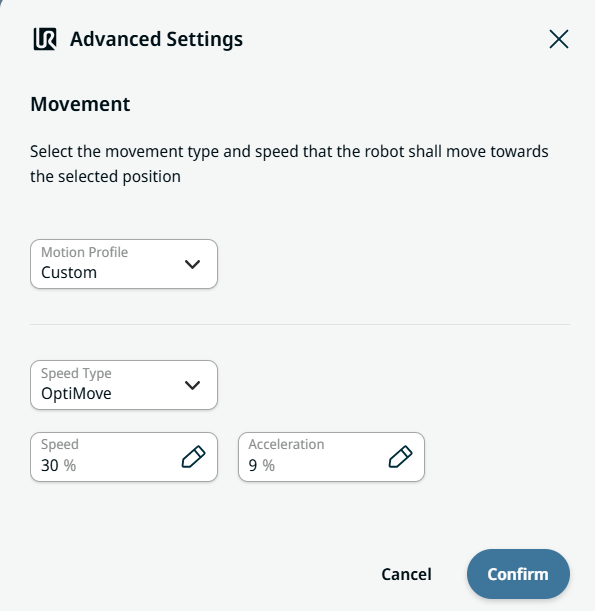
| Pokročilé nastavenia |
Používatelia môžu vytvárať profily pohybov v pokročilých nastaveniach pomocou dvoch záložiek a dvoch polí:
Profil pohybu je funkcia, ktorá používateľom umožňuje nastaviť preddefinované profily pohybu v uzloch pohybu: Pohyb kĺbov, Lineárny pohyb, Pohyb kruhového oblúka, Procesný pohyb a Smer. Vlastný profil pohybu umožňuje používateľom definovať údaje o pohybe v uzle pohybu. V poli Typ rýchlosti je predvolenou možnosťou OptiMove. Zvoľte pohyb „ “ alebo „ “, ak chcete zadávať rýchlosť a zrýchlenie v stupňoch za sekundu alebo v milimetroch za sekundu. Nastavenia OptiMove sú uvedené v percentách, aby sa zjednodušilo používanie a nastavenie. Používatelia môžu nakonfigurovať percentuálnu hodnotu preferovanej rýchlosti v záložke Rýchlosť, ktorá nastavuje cieľovú rýchlosť jazdy ako percentuálnu hodnotu maximálnej rýchlosti robota. Používatelia môžu nakonfigurovať percentuálnu hodnotu preferovaného zrýchlenia v záložke Zrýchlenie, ktorá nastavuje cieľové limity krútiaceho momentu počas zrýchlenia a spomaľovania ako percentuálnu hodnotu maximálneho výkonu robota.
|