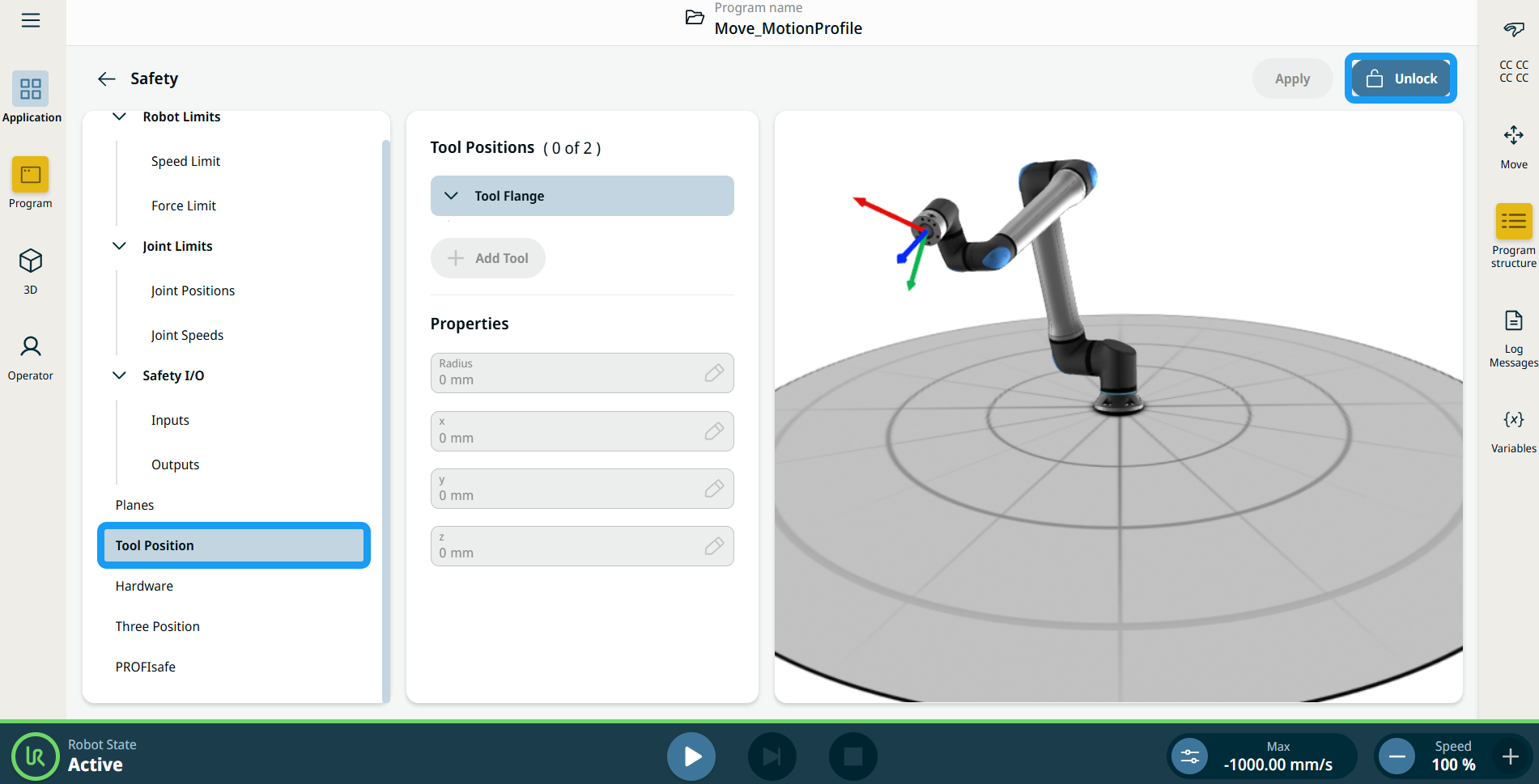
Restricții pentru poziția sculei
| Detalii |
Poziția sculei are două beneficii esențiale:
Puteți defini, configura și gestiona până la două poziții de scule.
|
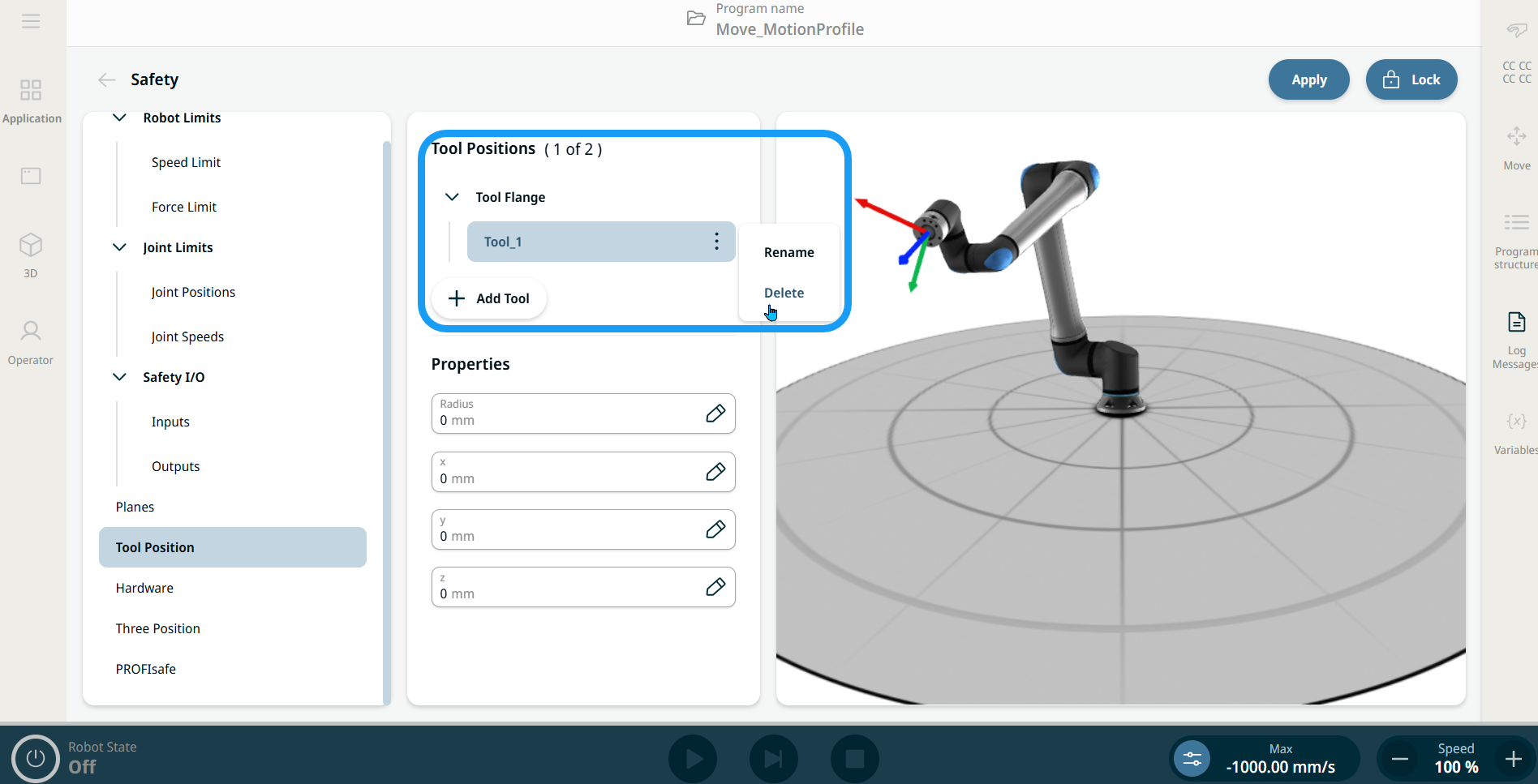
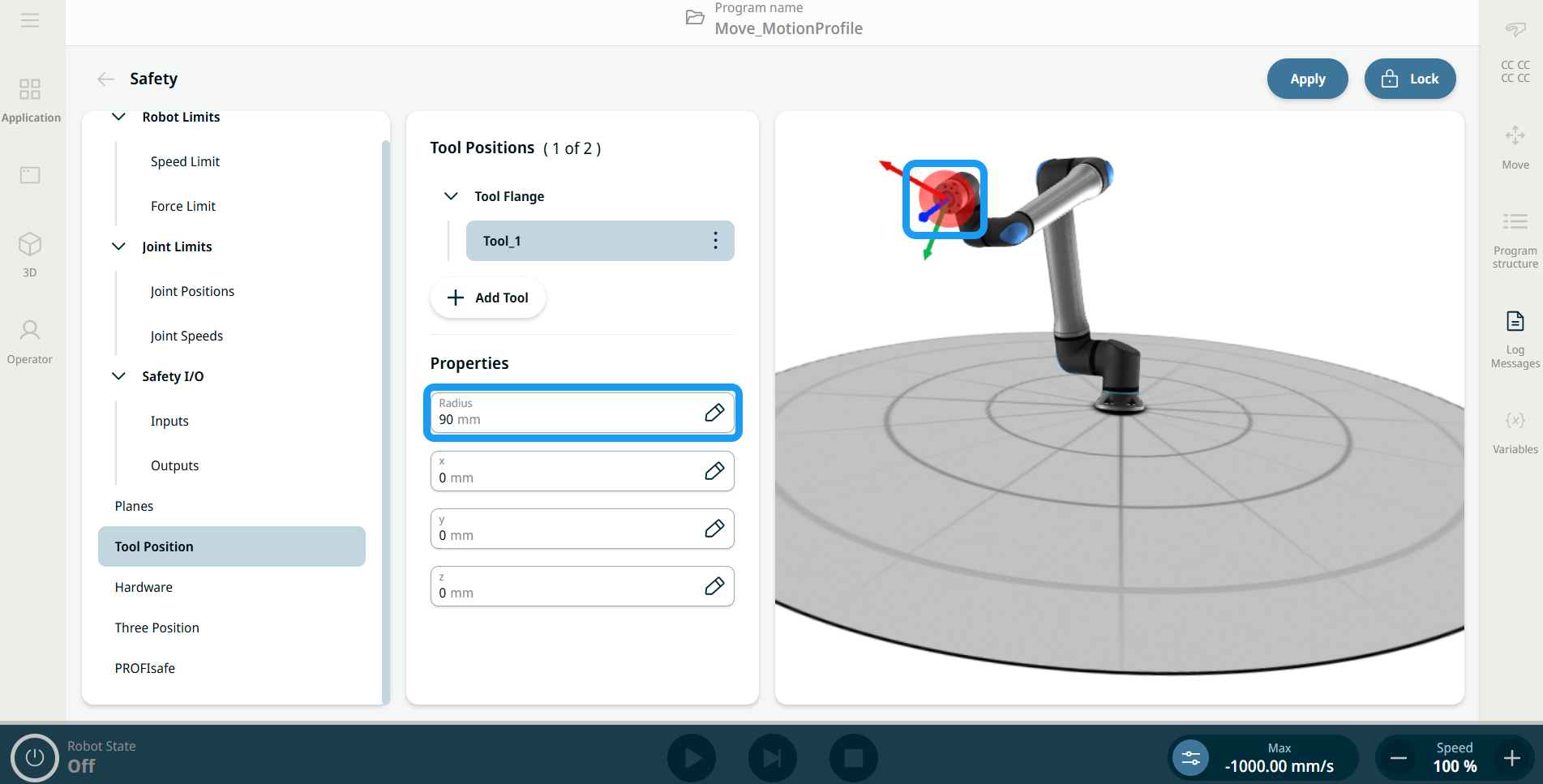
| Scule definite de utilizator |
Pentru instrumentele definite de utilizator, utilizatorul poate modifica:
|
|
Pentru a accesa poziția sculei |
|
|
|
|
|
|
|