Limite Robot
| Descriere |
Limite robot restricționează mișcările generale ale robotului.
Limitele de siguranță restricționează forțele și mișcările la flanșa sculei și centrul celor două poziții pentru sculă definite de utilizator
|
| Limite de viteză | 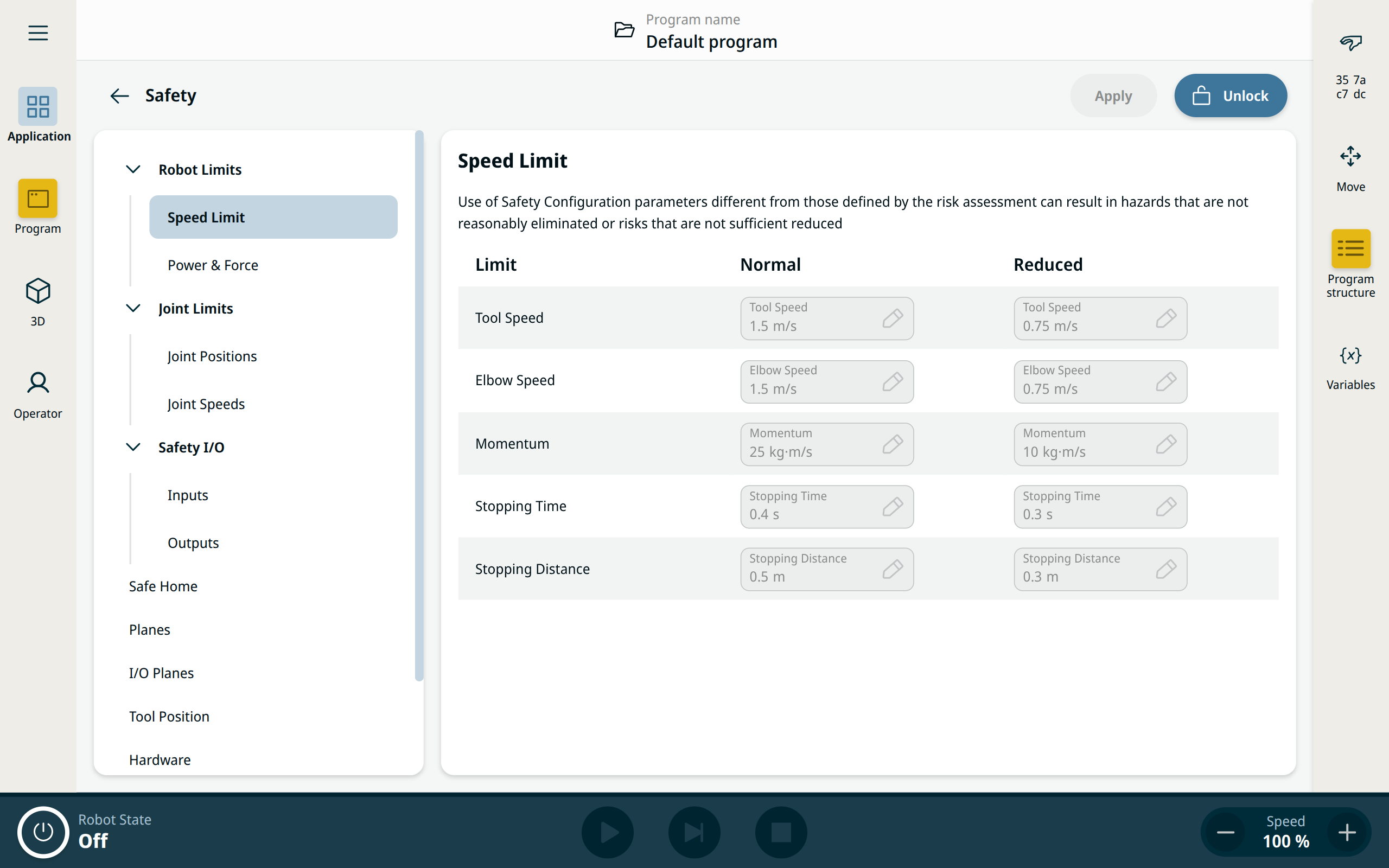
Restricționarea timpului de oprire și a distanței afectează viteza generală a robotului. De exemplu, dacă timpul de oprire este setat la 300 ms, viteza maximă a robotului este limitată, permițând robotului să se oprească în decurs de 300 ms.
|
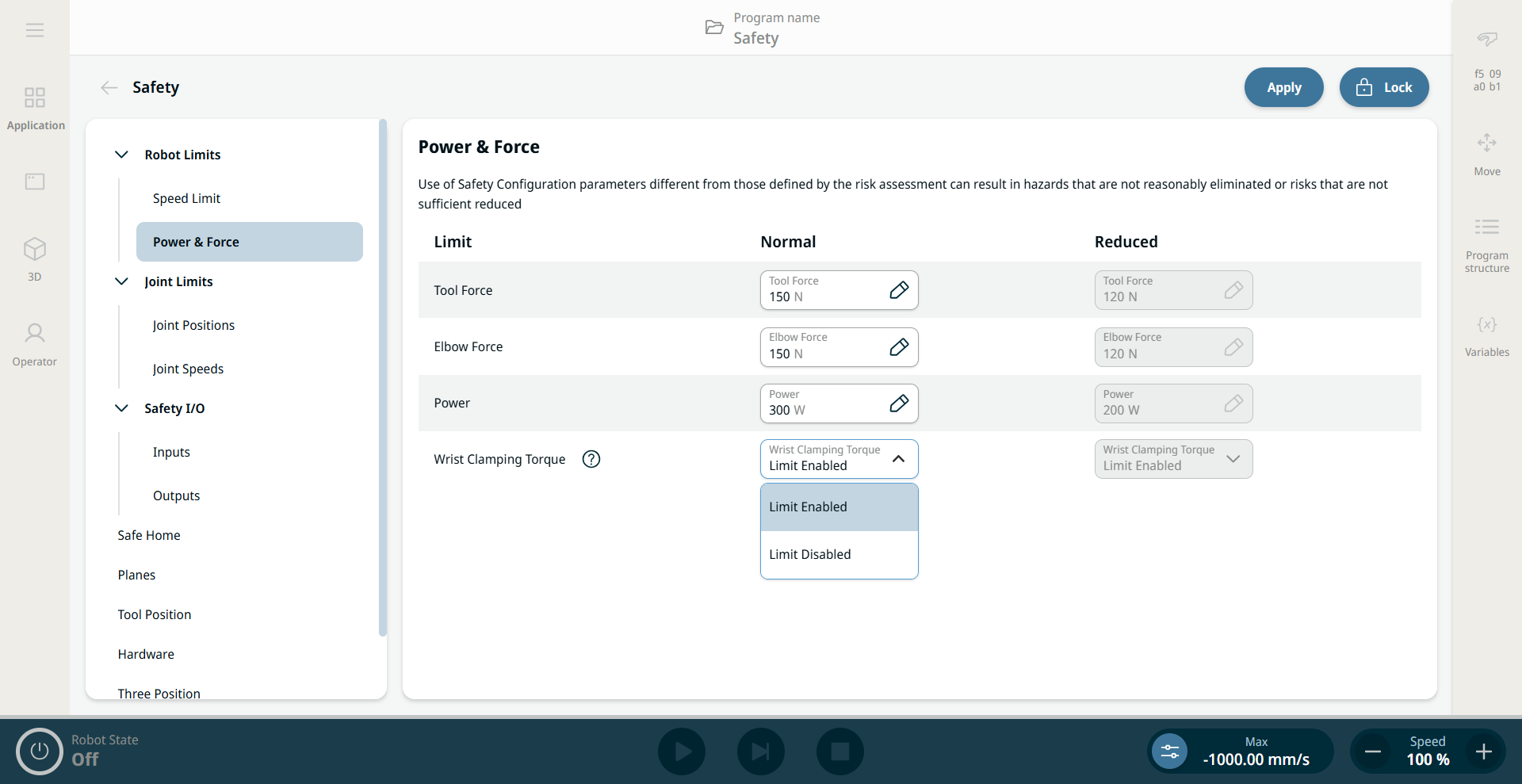
| Putere și Forță |
Forțele sculei și cotului pot fi depășite de cele trei articulații ale încheieturii dacă funcția de siguranță „cuplu prindere încheietură” este dezactivată
|