Funkcje

| Funkcja bazowa |
|
| Funkcja narzędzia |
|
| Szczegóły |
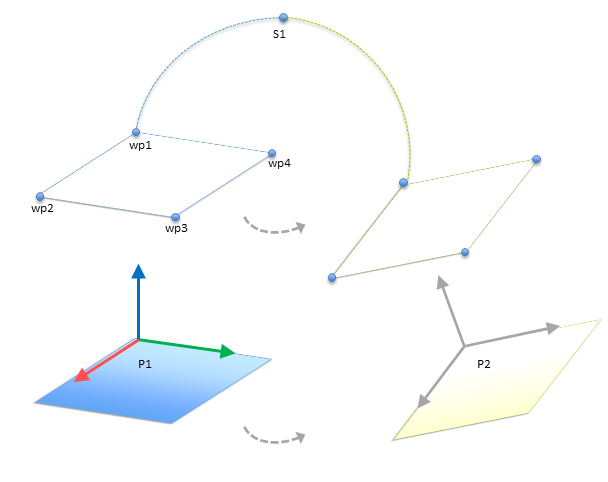
Funkcja Punkt, funkcja Linia i/lub funkcja Płaszczyzna służą do definiowania postawy funkcji. Położenie funkcji jest określane za pomocą metody wykorzystującej bieżącą postawę TCP w obszarze roboczym. Dzięki temu można uczyć robota lokalizacji funkcji za pomocą np. trybu ruchu swobodnego lub przesuwać ramię robota impulsowo do żądanej postawy. Wybór funkcji zależy od typu używanego obiektu i wymagań dotyczących dokładności. Gdy to możliwe, należy korzystać z funkcji Linia i Płaszczyzna, ponieważ są one oparte na większej liczbie punktów wejściowych. Więcej punktów wejściowych oznacza większą dokładność.
Aby na przykład dokładnie określić kierunek ruchu przenośnika liniowego, należy zdefiniować dwa punkty funkcji Linia przy zachowaniu jak największych możliwych odstępów fizycznych. Do określenia kierunku ruchu przenośnika liniowego można również użyć funkcji Punkt, jednak użytkownik musi skierować punkt TCP w kierunku ruchu przenośnika. Wykorzystanie większej liczby punktów do zdefiniowania postawy stołu oznacza, że orientacja jest oparta o pozycje, a nie o orientację pojedynczego punktu TCP.
Precyzyjne skonfigurowanie orientacji pojedynczego punktu TCP jest trudniejsze.
|
| Korzystanie z funkcji |
Aby powiązać ruchy robota (np. poleceń RuchJ, RuchL i RuchP) z funkcją, można odwołać się do funkcji zdefiniowanej w instalacji w programie robota (patrz sekcja Ruch). Dzięki temu można w łatwy sposób dostosować program robota, na przykład gdy jest wiele stanowisk robota lub obiekt porusza się podczas wykonywania programu, lub stale porusza się w obrębie sceny. Dostosowanie funkcji obiektu koryguje wszystkie ruchy programu względem tego obiektu. Dodatkowe przykłady zawierają sekcje: (Przykład: ręczna aktualizacja funkcji w celu dostosowania programu) i (Przykład: dynamiczna aktualizacja postawy funkcji). Po wybraniu funkcji jako układu odniesienia przyciski Porusz narzędzie odpowiedzialne za translację i rotację działają w wybranym obszarze funkcji (patrz Karta Ruch) i (Aby użyć strzałek Porusz narzędzie), odczytując współrzędne punktu TCP. Przykładowo, jeśli jako funkcję wybrano stół, który został również wybrany jako wartość referencyjna na karcie Ruch, przyciski strzałek translacji (np. góra/dół, lewo/prawo, przód/tył) przesuwają robota w odpowiednim kierunku względem stołu. Ponadto współrzędne punktu TCP będą mieściły się w ramie stołu.
|

| Funkcja Linia
|
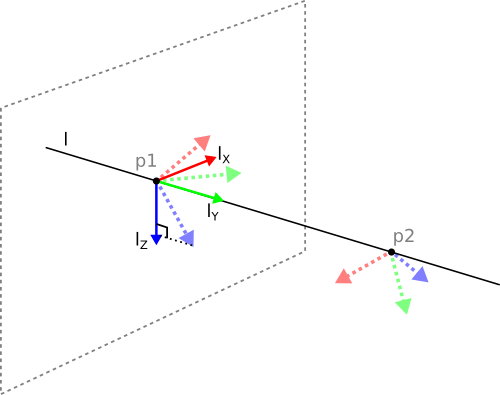
Funkcja liniowa określa linie, po których musi podążać robot. (Np.: podczas używania funkcji śledzenia przenośnika). Linia l jest definiowana jako oś pomiędzy dwoma funkcjami punktu, p1 i p2, co przedstawia rysunek Funkcje. |
|
Dodawanie linii |
Tutaj widać, że oś skierowana od pierwszego do drugiego punktu stanowi oś y układu współrzędnych linii. Oś z jest definiowana przez rzutowanie osi z punktu p1 na płaszczyznę prostopadłą do linii. Pozycja układu współrzędnych linii jest taka sama jak pozycja punktu p1.
|