Ruch
| Opis |
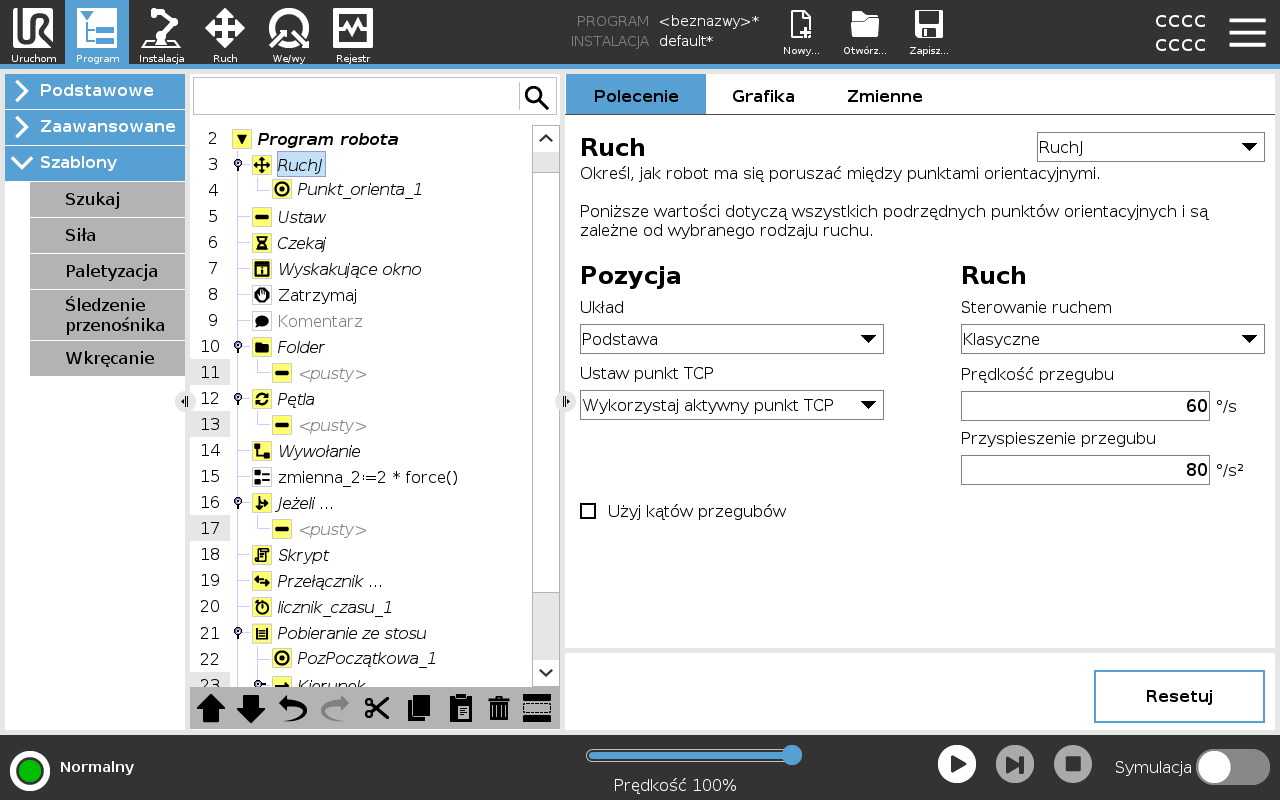
Polecenie Ruch służy robotowi do przemieszczania się z punktu A do punktu B. Sposób poruszania się robota jest ważny dla zadania wykonywanego przez robota. Gdy dodasz polecenie Ruch do drzewa programu, po prawej stronie ekranu pojawi się okienko Ruch. Opcje dostępne na ekranie Ruch umożliwiają konfigurację opcji Ruch i powiązanych punktów orientacyjnych.
|
| Ustawienia prędkości |
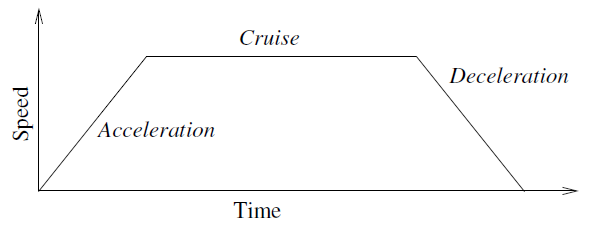
Współdzielone parametry, które mają zastosowanie do rodzajów ruchu, to maksymalna prędkość i przyspieszenie przegubu.
|
|
Opcja Użyj kątów przegubów to alternatywa dla postawy 3D, gdy do definiowania punktu orientacyjnego używane jest polecenie RuchJ.
Punkty orientacyjne zdefiniowane przy użyciu opcji Użyj kątów przegubów nie są korygowane podczas przenoszenia programu między robotami. Jest to przydatne, gdy program jest instalowany w nowym robocie.
Użycie opcji Użyj kątów przegubów sprawia, że opcje TCP i funkcja są niedostępne. |
|
Użyj tego ustawienia, jeśli musisz zmienić punkt TCP podczas wykonywania programu robota. Jest to przydatne, gdy podczas wykonywania programu robota trzeba manipulować różnymi obiektami. Sposób poruszania się robota jest dostosowywany w zależności od tego, który z punktów TCP jest ustawiony jako aktywny. Ignoruj aktywny TCP umożliwia regulację tego ruchu w stosunku do kołnierza narzędzia. |
|
| Aby ustawić punkt TCP w opcji Ruch |
|
|
Użyj funkcji między punktami orientacyjnymi, aby program zapamiętał współrzędne narzędzia. Jest to przydatne podczas ustawiania punktów orientacyjnych (patrz Funkcje).
Funkcji można używać w następujących okolicznościach:
|