Ruch liniowy
| Opis |
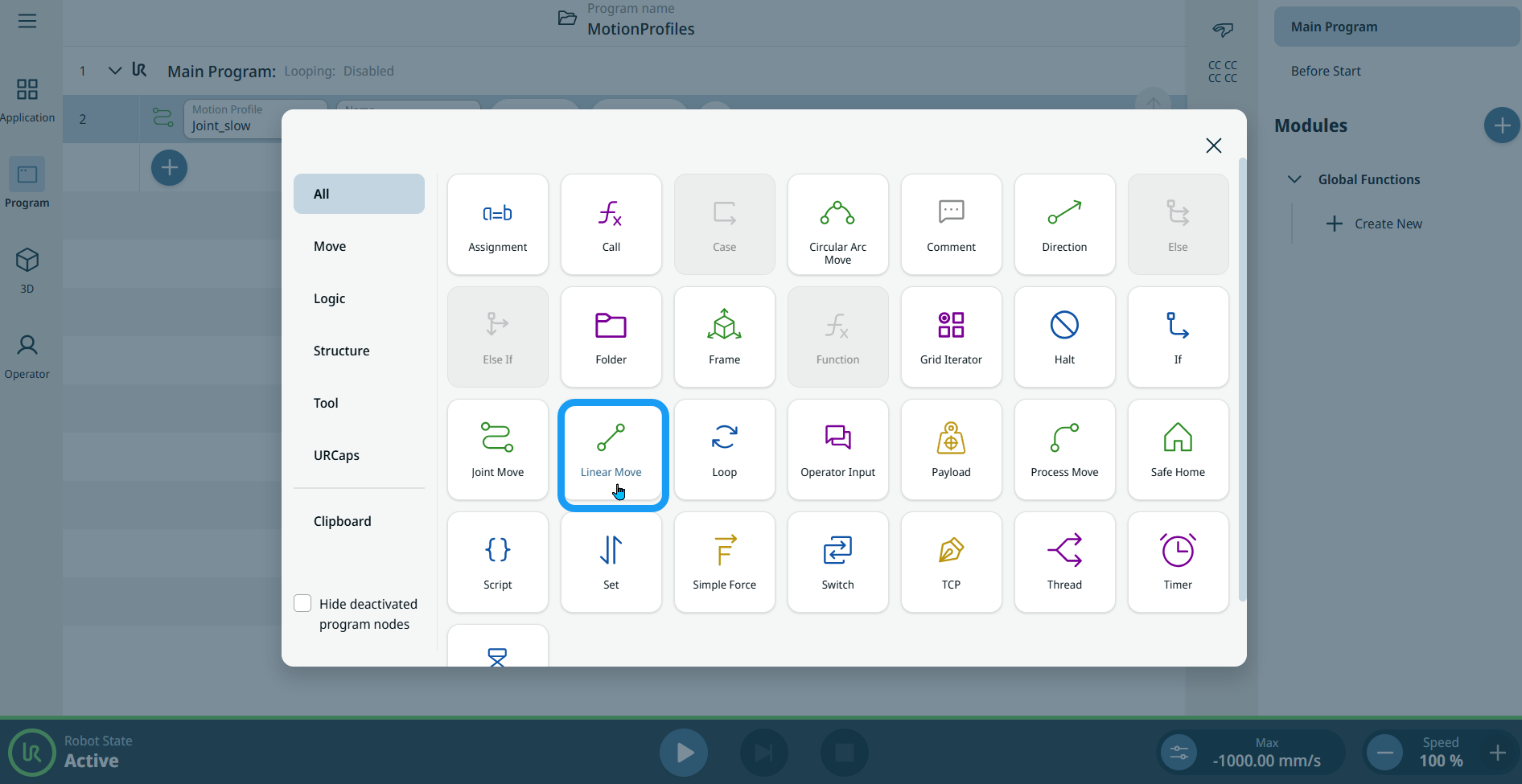
The Linear Move command node supports Motions Profiles as Joint Move, but it creates a movement that is a direct line from point A and point B. It moves the Tool Center Point (TCP) linearly between waypoints. Oznacza to, że każde złącze wykonuje bardziej skomplikowany ruch, aby utrzymać narzędzie na prostej ścieżce.
|
|
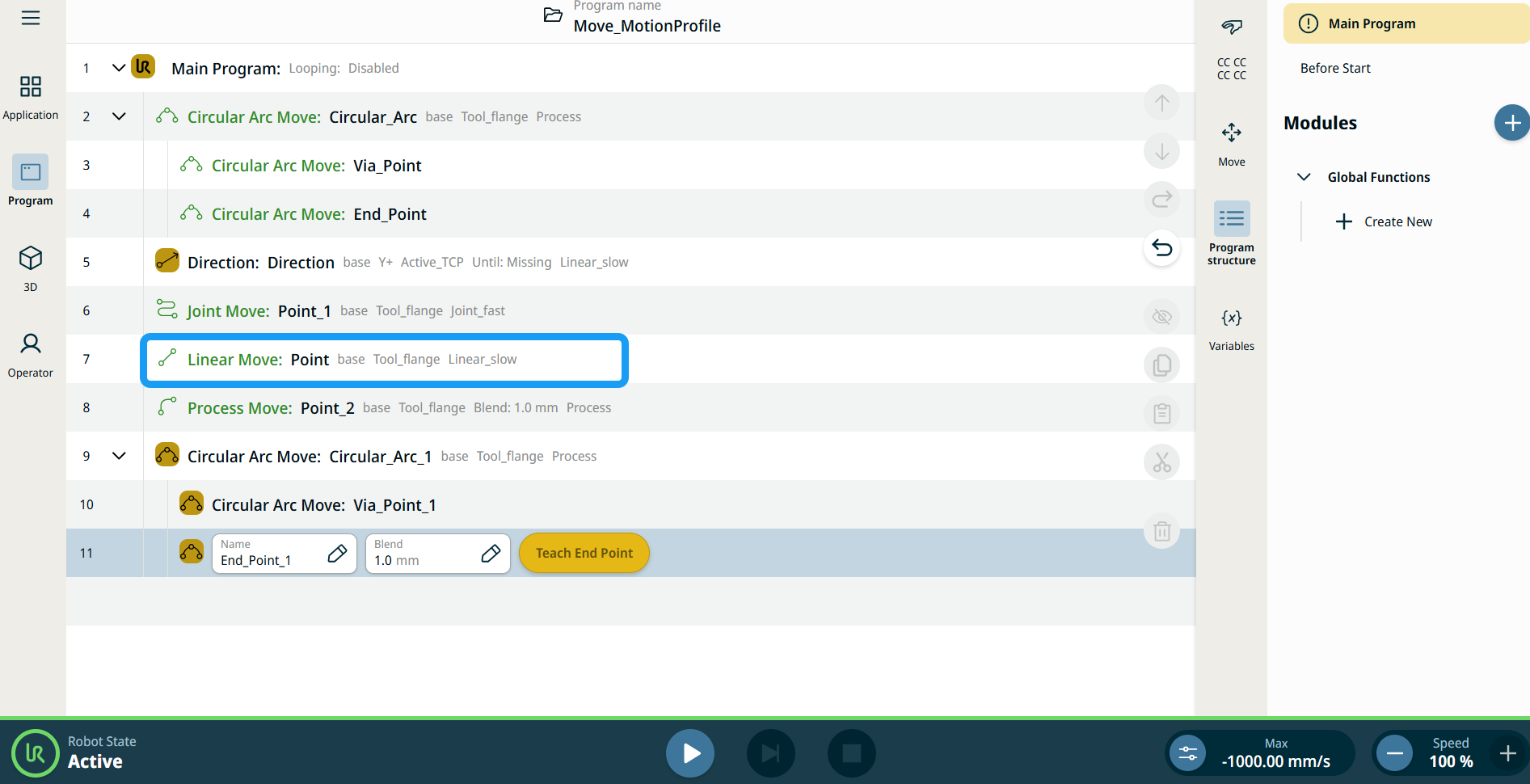
To access Linear Move command |
|
|
|
|
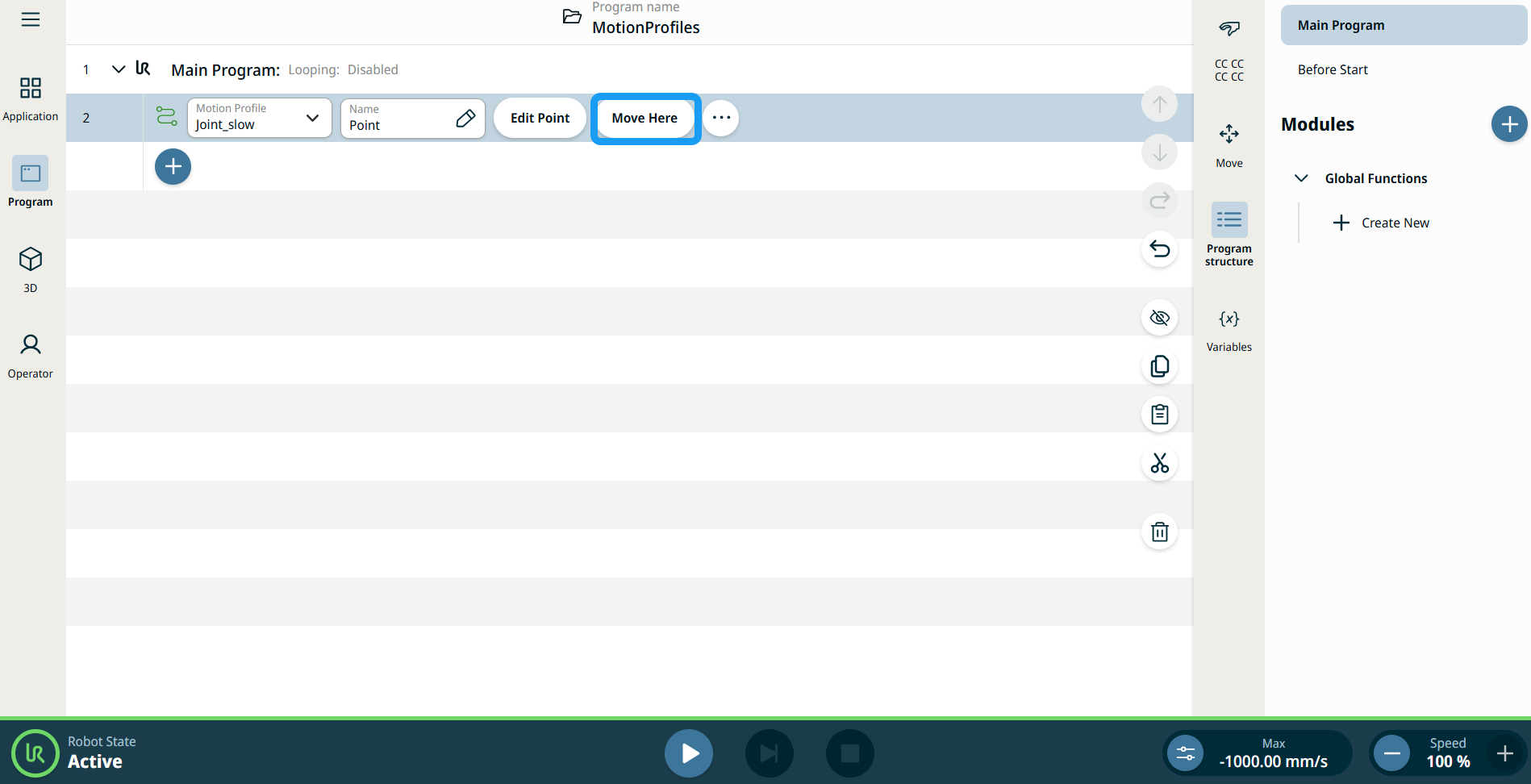
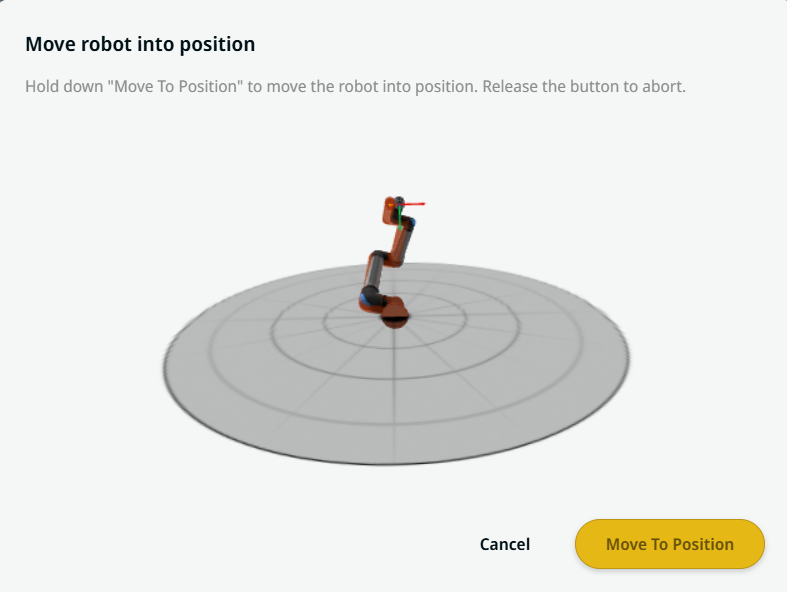
| Używanie przycisku Przenieś tutaj |
Przycisk Przenieś tutaj jest widoczny w poleceniach Ruch liniowy i Ruch przegubu. Funkcja ta umożliwia przejście do pozycji punktu orientacyjnego bezpośrednio z drzewa programu. Naciśnięcie przycisku Przenieś tutaj powoduje otwarcie okna dialogowego Przesuń robota do pozycji. Przycisk jest widoczny, gdy punkt orientacyjny został nauczony i jest włączony tylko wtedy, gdy robot ma status Normalny lub Ograniczony.
|
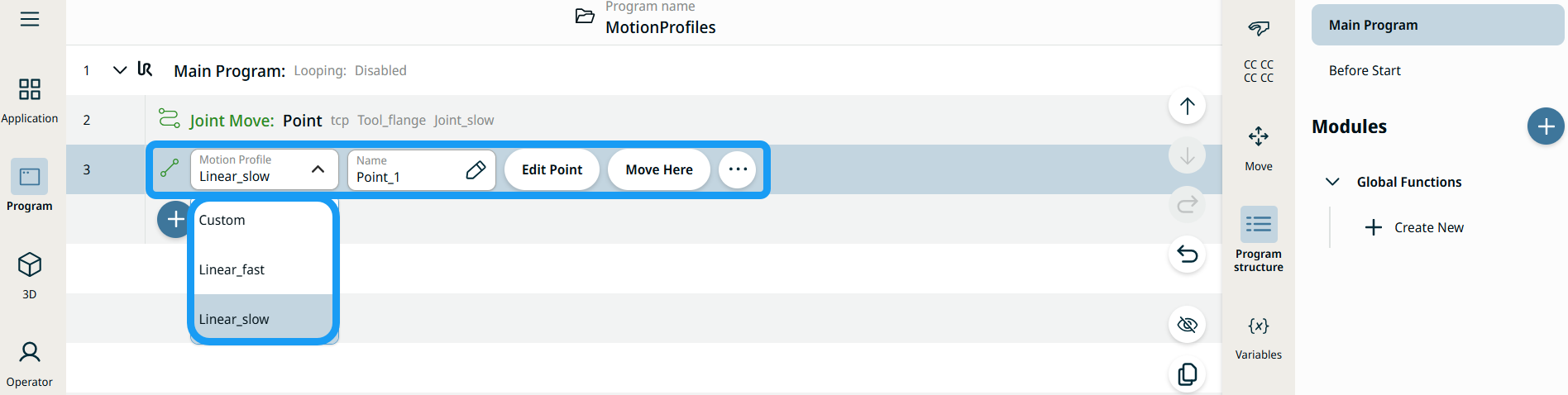
| Etykiety profilu ruchu w węzłach ruchu |
Wszystkie węzły poleceń związane z ruchem w drzewie programu wyświetlają profil ruchu powiązany z danym węzłem. Ta funkcja umożliwia użytkownikom wyświetlenie wybranego profilu ruchu w węźle ruchu. Funkcja ta jest zaimplementowana w następujących węzłach poleceń: Węzły ruchu z niestandardowym profilem ruchu będą wyświetlać wartości prędkości i przyspieszenia zamiast profilu ruchu. |
|
|
|
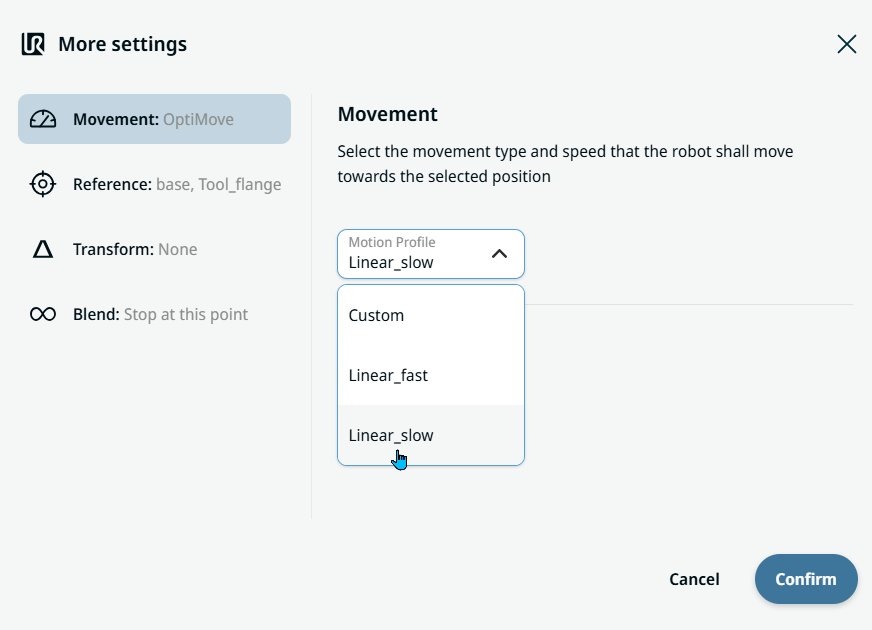
| Movement setting |
|
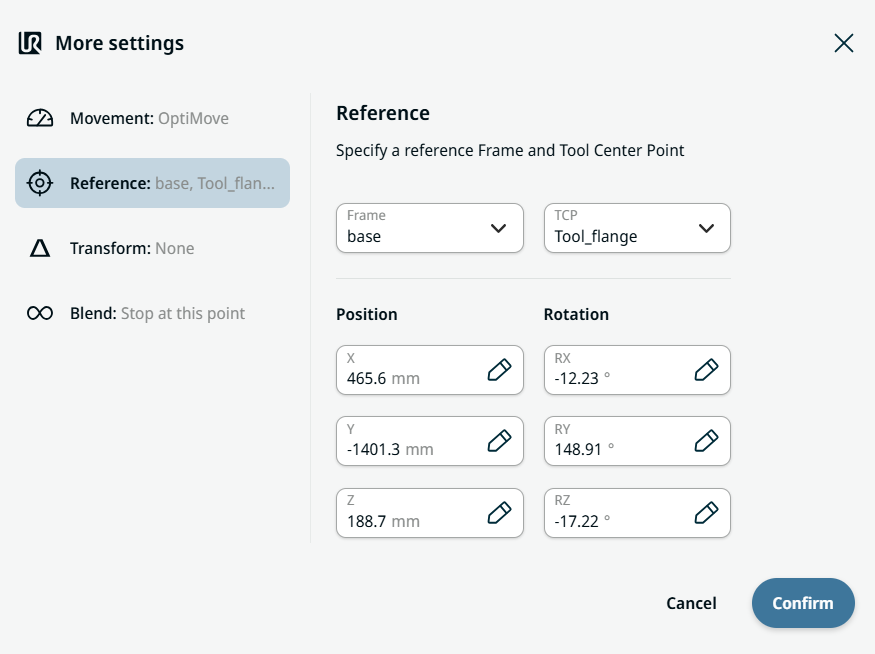
| Reference setting |
|
| Transform setting |
|
|
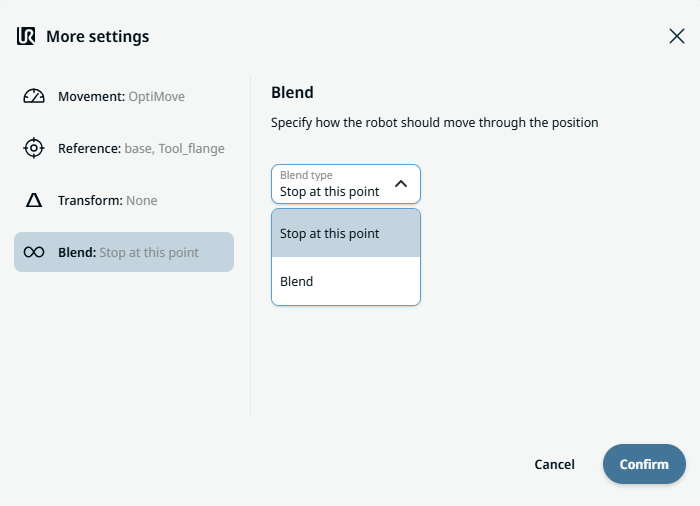
Blend setting |
|