Pierwsze uruchomienie
| Opis |
Pierwszym uruchomieniem jest początkowa sekwencja działań, które można wykonać z robotem po montażu. Ta początkowa sekwencja wymaga od użytkownika:
|
|
Niesprawdzenie obciążenia i instalacji przed uruchomieniem ramienia robota może prowadzić do obrażeń personelu i/lub strat materialnych.
Nieprawidłowe ustawienia obciążenia i instalacji uniemożliwiają prawidłowe działanie ramienia robota i skrzynki sterowniczej.
Uruchomienie robota w niższej temperaturze może skutkować niższą wydajnością lub zatrzymaniem z powodu lepkości oleju i smaru zależnej od temperatury.
|
Włączanie robota
| W celu włączenia robota |
Włączanie robota powoduje włączenie Skrzynki sterowniczej i ładuje wyświetlacz na ekranie TP.
|
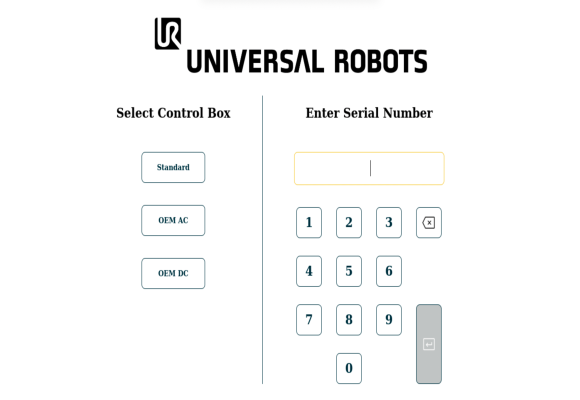
Wprowadzanie numeru seryjnego
| Aby wstawić numer seryjny |
Pierwsza instalacja robota wymaga wprowadzenia numeru seryjnego znajdującego się na ramieniu robota. Procedura jest także wymagana przy ponownej instalacji oprogramowania. Na przykład podczas instalacji aktualizacji oprogramowania. |
|
|
Załadowanie ekranu startowego może potrwać kilka minut.
|
Uruchamianie ramienia robota
| Uruchamianie robota |
Uruchomienie ramienia robota powoduje rozłączenie układu hamulcowego, umożliwiając rozpoczęcie ruchu ramienia robota i korzystanie z PolyScope X.
|


Jeśli stan ramienia robota zmieni się z Bezczynność na Normalny, dane czujnika zostaną porównane ze skonfigurowanym mocowaniem ramienia robota. Jeśli mocowanie zostanie zweryfikowane, dotknij START, aby kontynuować zwalnianie wszystkich hamulców przegubu i przygotować ramię robota do pracy.
|

Wyłączanie robota
| Aby wyłączyć zasilanie ramienia robota |
Nieoczekiwane uruchomienie i/lub ruch mogą spowodować obrażenia.
Teraz możesz:
|