PROFIsafe
| Opis |
Protokół sieciowy PROFIsafe (zaimplementowany w wersji 2.6.1) umożliwia robotowi komunikację z bezpiecznym sterownikiem PLC zgodnie z wymaganiami normy ISO 13849, kategoria 3, poziom PLd. Robot przesyła informacje dotyczące bezpieczeństwa do sterownika PLC bezpieczeństwa oraz odbiera informacje dotyczące bezpieczeństwa. Komunikaty związane z bezpieczeństwem mogą być komunikatami o stanie lub służyć do uruchomienia funkcji bezpieczeństwa (np. ustawienia ograniczone, zatrzymanie). Polecenia zatrzymania opisano zgodnie z normą IEC 60204-1, gdzie Zatrzymanie awaryjne jest zatrzymaniem kategorii 1, a zatrzymanie zabezpieczające jest zatrzymaniem kategorii 2.
Interfejs PROFIsafe stanowi bezpieczną, opartą na sieci alternatywę dla podłączania przewodów do styków bezpieczeństwa IO skrzynki sterowniczej robota. Korzystanie z interfejsu PROFIsafe pozwala zachować specyfikacje bezpieczeństwa funkcjonalnego robota UR (PL, kategoria i PFH). Szczegółowe informacje można znaleźć w sekcji „Tabela funkcji bezpieczeństwa” w instrukcji obsługi UR. Na przykład „zatrzymanie bezpieczeństwa” należy do kategorii PLd 3, a wartość PFH wynosi mniej niż 1,8E-07 (1,8 x 10-7).
PROFIsafe jest dostępny tylko w przypadku robotów, które mają aktywną licencję, którą można uzyskać, kontaktując się z lokalnym przedstawicielem handlowym. Po otrzymaniu licencji pobierz ją z myUR. Informacje dotyczące rejestracji robota i aktywacji licencji można znaleźć w sekcji „Rejestracja robota i pliki licencji URCap”.
|
| Sterownik PLC zabezpieczeń w |
Komunikat o stanie wysyłany przez robota do sterownika PLC zabezpieczeń zawiera informacje przedstawione w poniższej tabeli.
|
||||||||||||||||
|
|
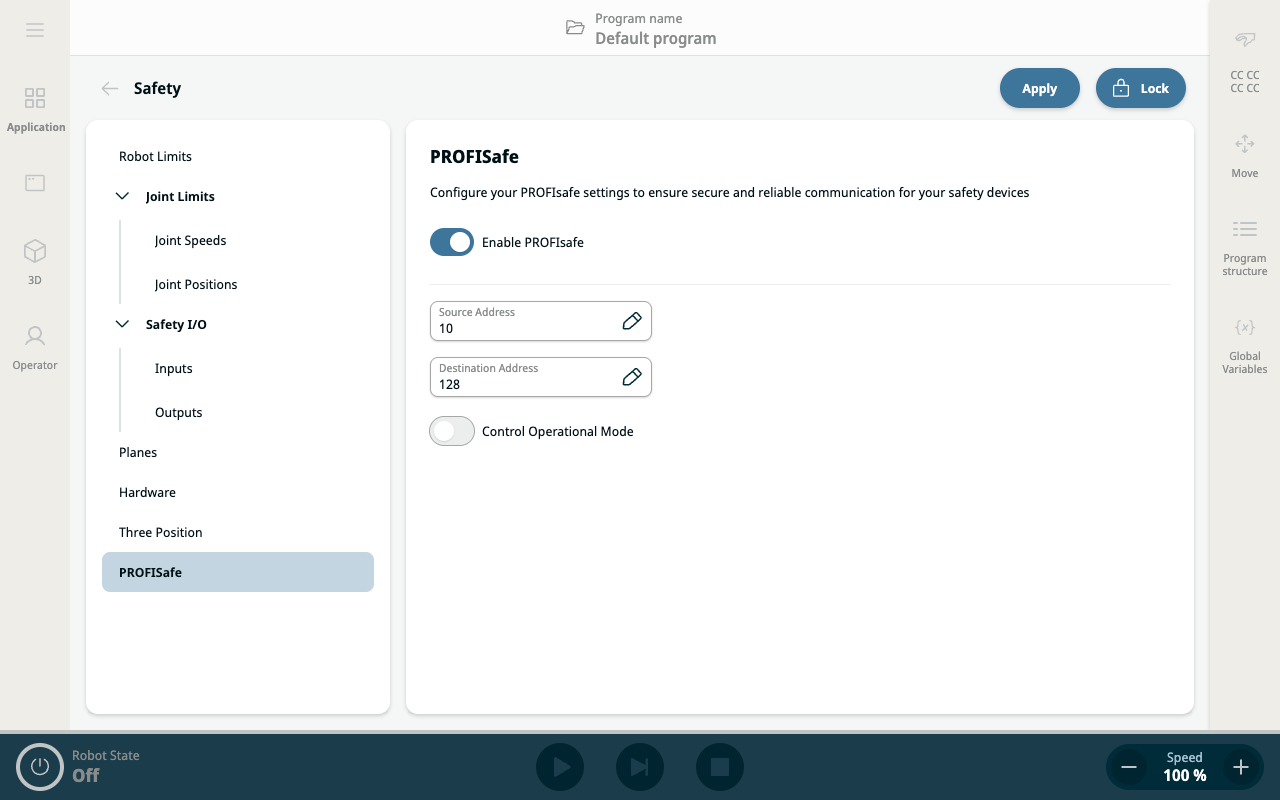
| Konfiguracja PROFIsafe |
|
|
|
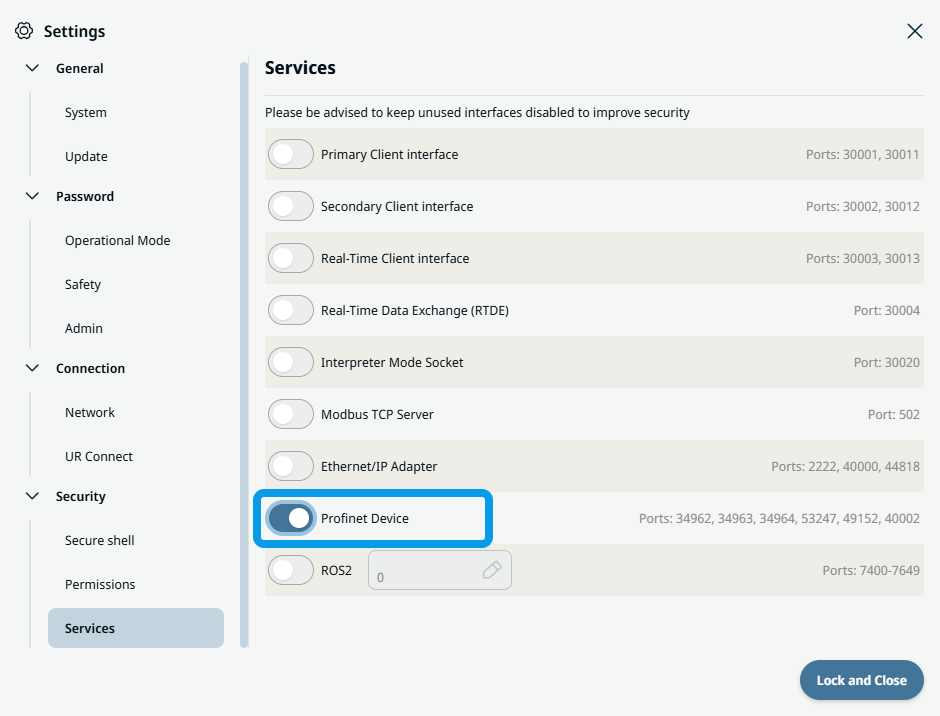
Aby można było skonfigurować i korzystać z protokołu PROFIsafe, urządzenie Profinet musi zostać włączone w menu ustawień usług zabezpieczeń.
 Zapoznaj się ze szczegółami i lokalizacją interfejsu „Profinet”.
|