Grense for klemmoment for håndledd
| Beskrivelse |
Momentgrense for håndleddsklemming er en innstilling som aktiverer eller deaktiverer begrensning av maksimalt klemmemoment for robotens håndledd. Begrensningen er aktivert som standard. Denne sikkerhetsfunksjonen begrenser hvor mye moment håndleddet kan bruke ved skyving.
|
|
Detaljer om grense for klemmemoment for håndledd |
Når aktivert, begrenser roboten momentet i håndleddene for å forhindre klemming mellom håndledd, nyttelast og robotens underarm. Når innstillingen er aktivert, definerer den også en ikke-sikkerhetsvurdert øvre grense for de påførte momentvinduene for base-, skulder- og albueleddene. I kraftkontrollapplikasjoner kan de oppnåelige kontaktkreftene være betydelig lavere enn de angitte kreftene i sikkerhetsfunksjonene Verktøykraftgrense og Albuekraftgrense.
Når deaktivert, kan roboten bruke høyere skyvekraft med håndledd, for eksempel i tvangsstyrte anvendelser. Når funksjonen er deaktivert, må risikoen for klemming mellom håndleddet, nyttelasten og robotens underarm reduseres på andre måter. Denne sikkerhetsfunksjonen er aktivert på alle roboter som standard. I PolyScope X-versjon 10.12 og nyere er det mulig å deaktivere denne sikkerhetsfunksjonen.
|
|
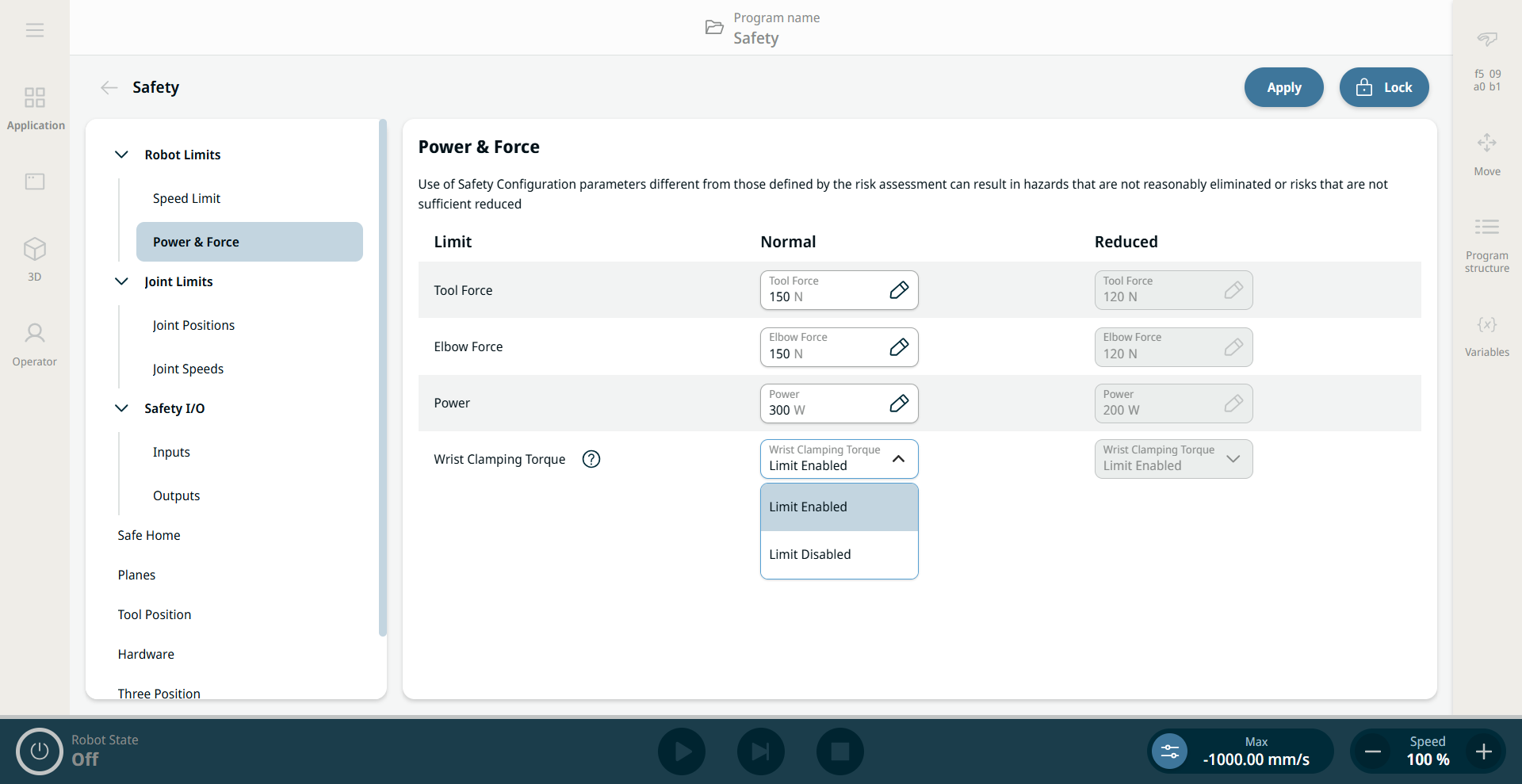
Aktiver og deaktiver klemmemomentgrense for håndledd |
|