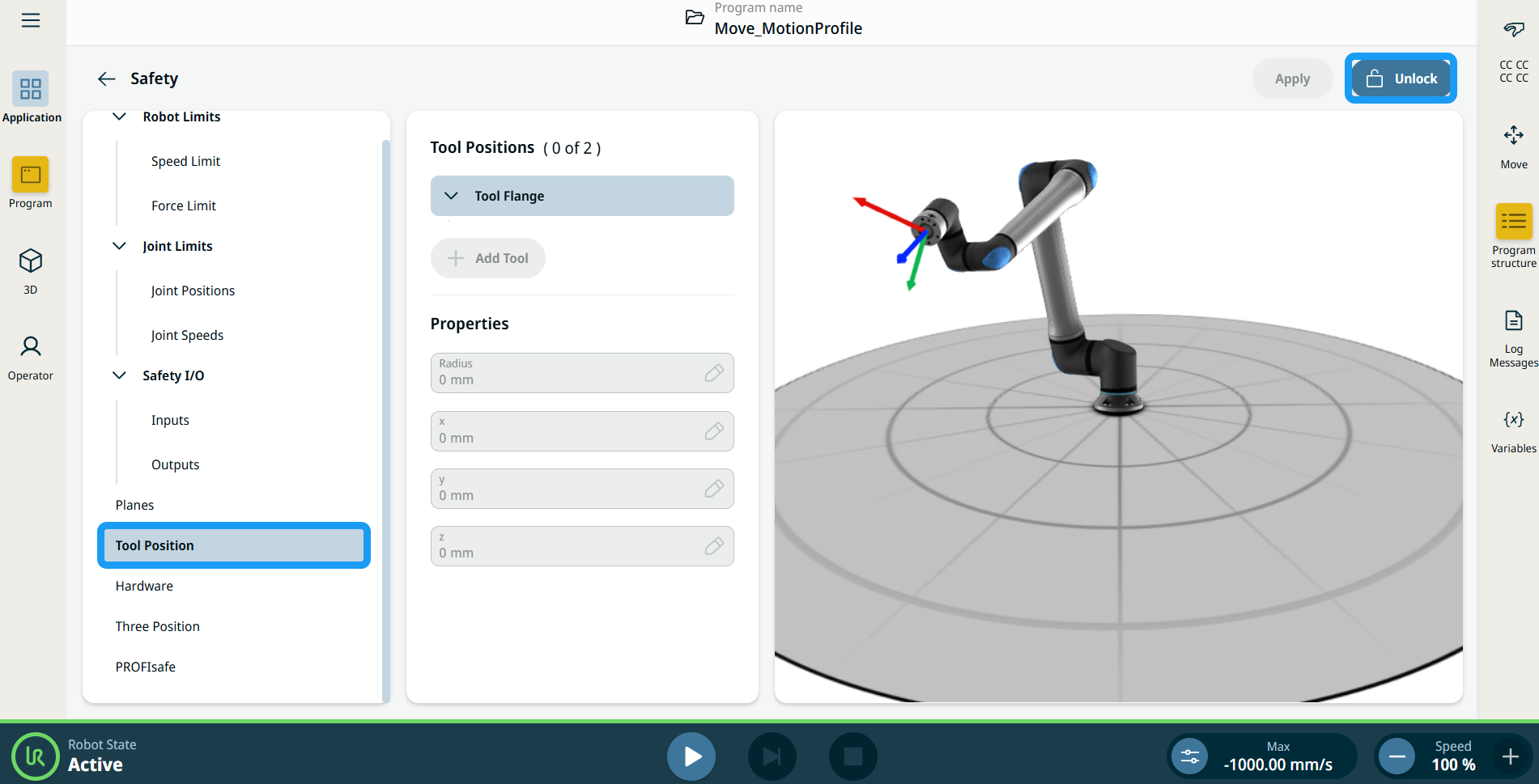
Begrensning for verktøyposisjon
| Detaljer |
Verktøyposisjon har to viktige fordeler:
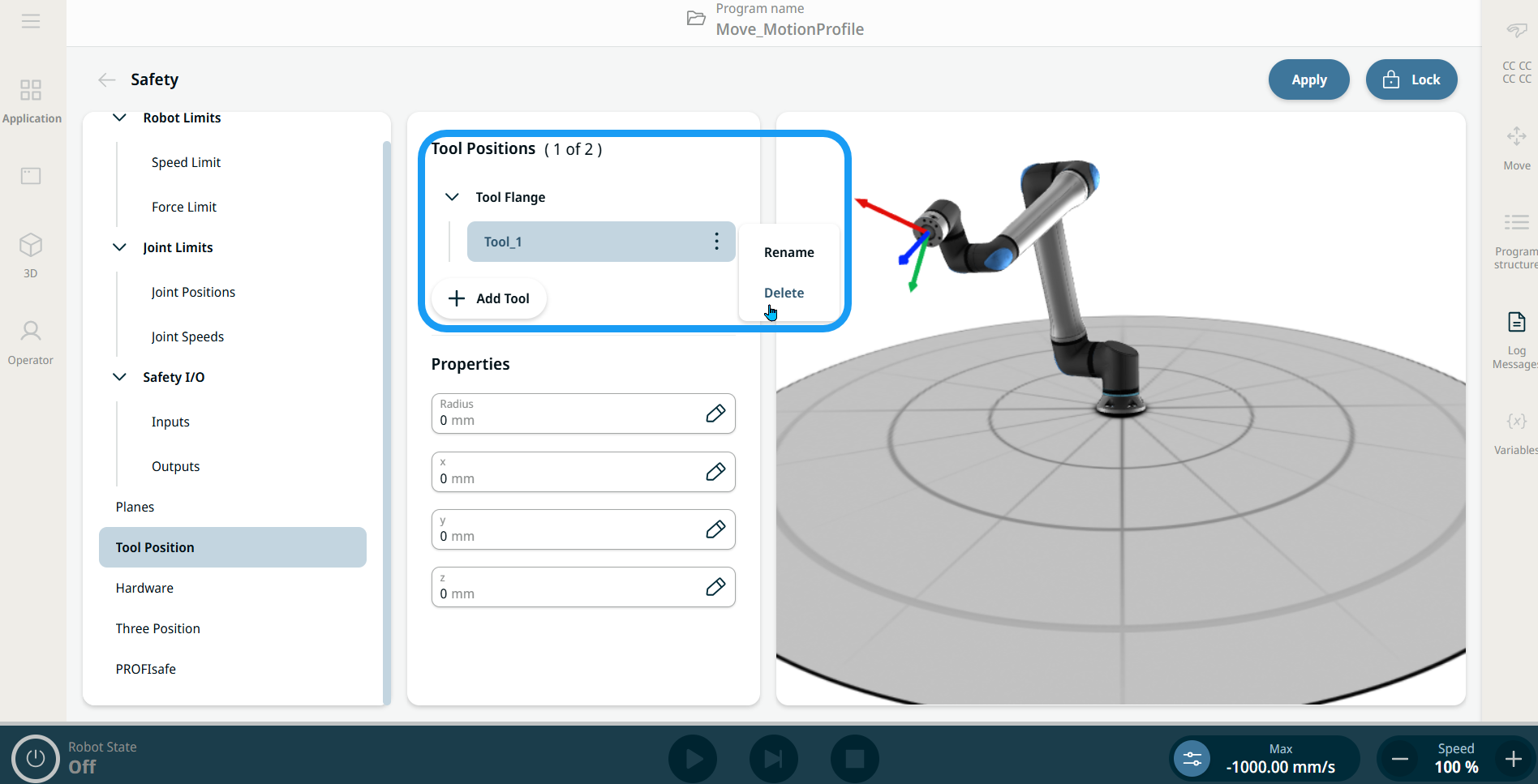
Du kan definere, konfigurere og administrere opptil to verktøyposisjoner.
|
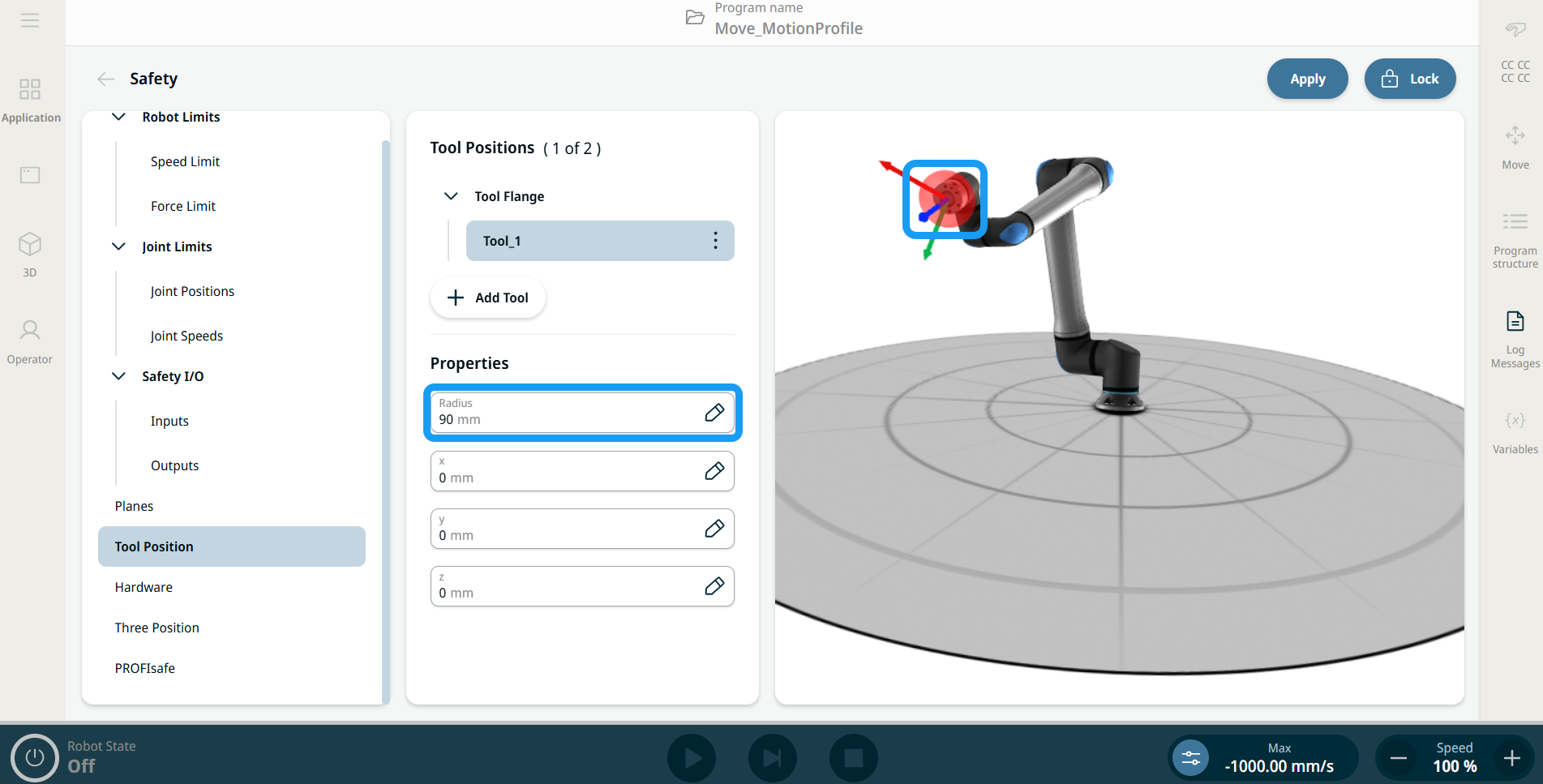
| Brukerdefinerte verktøy |
For brukerdefinerte verktøy kan brukeren endre:
|
|
Slik får du tilgang til verktøyposisjon |
|
|
|
|
|
|
|