Palletiseren
| Beschrijving |
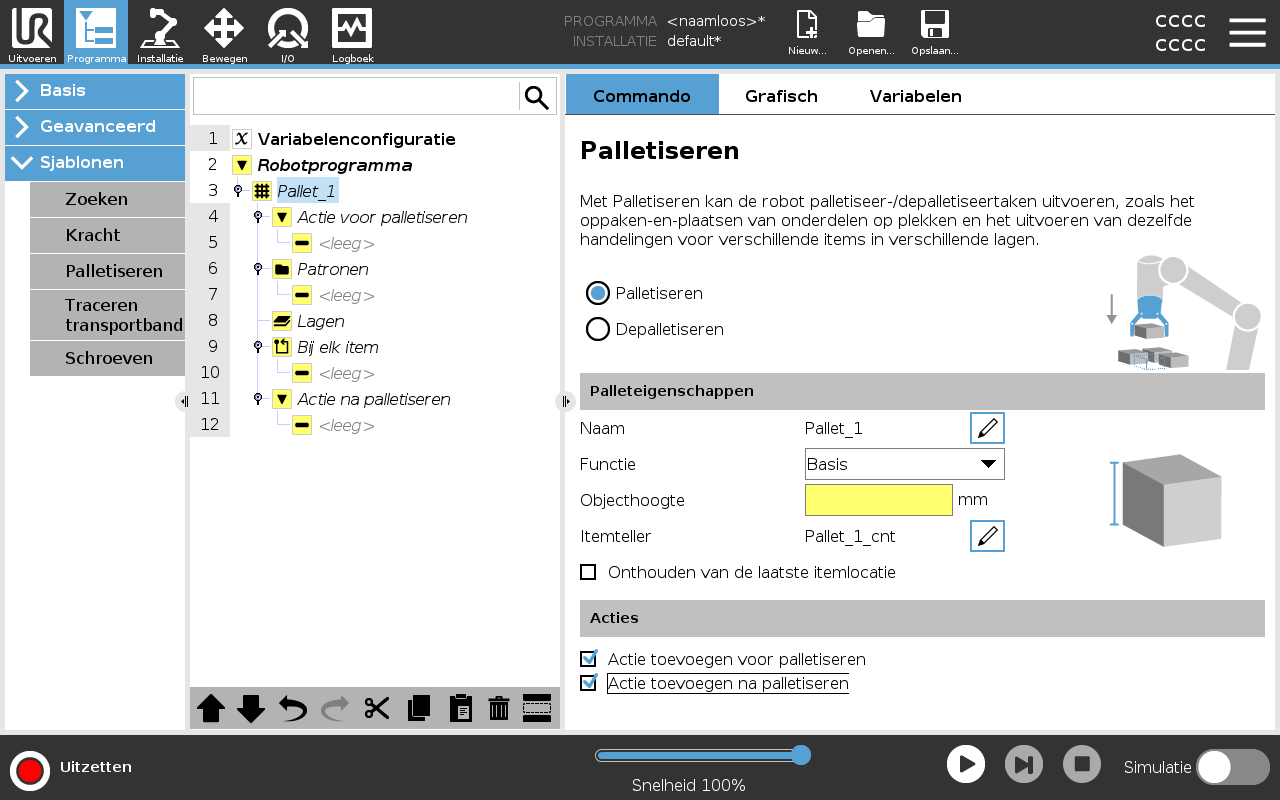
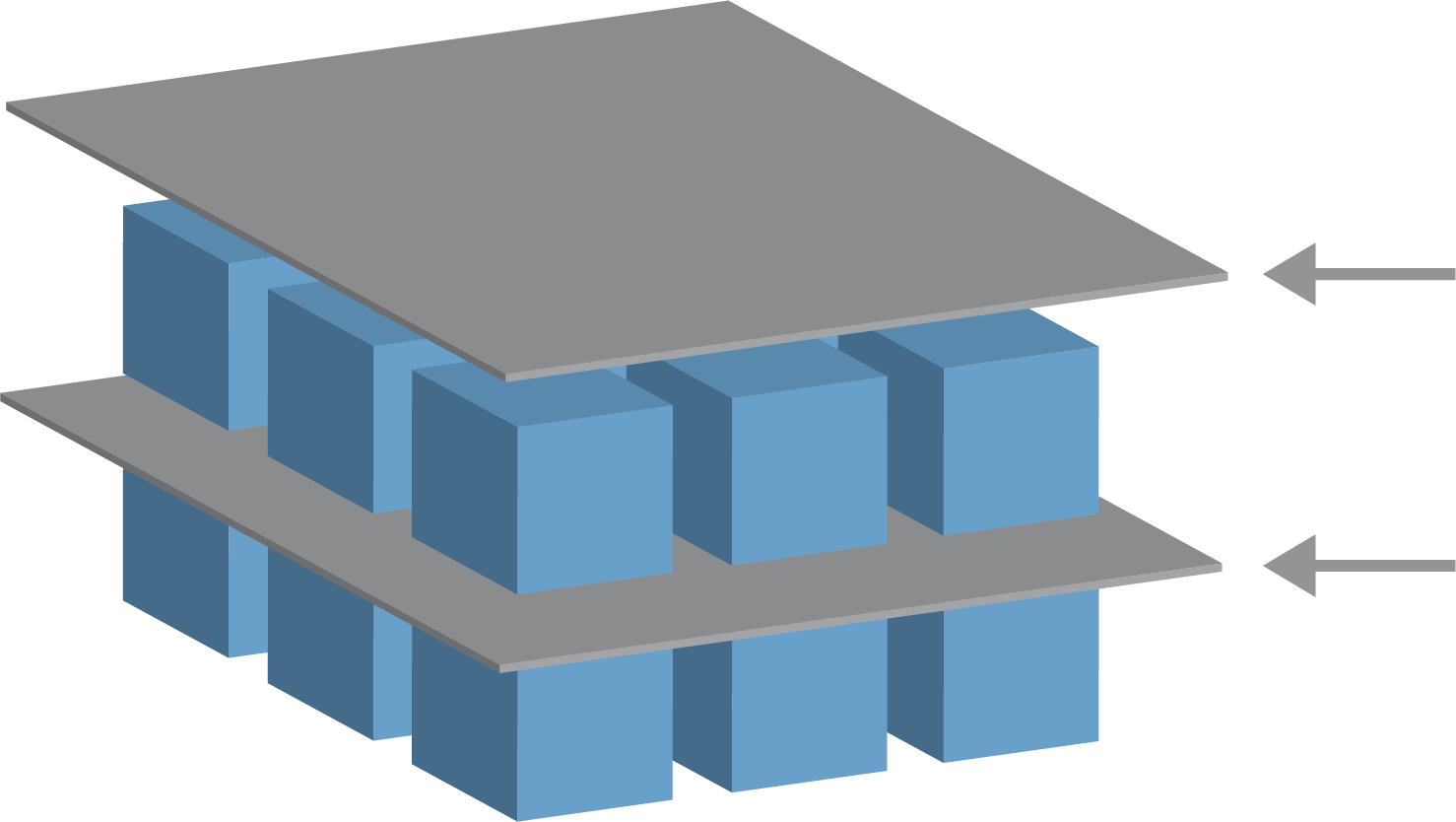
Palletiseren is een sjabloon voor het eenvoudig programmeren van palletiserings- en depalletiseringstaken, het oppakken en neerzetten van onderdelen (bijvoorbeeld bakken, armaturen, enz.) en het laten uitvoeren van herhaaldelijke acties door de robot voor verschillende objecten in meerdere lagen met verschillende patronen. U kunt verschillende patronen creëren en deze toepassen op specifieke lagen. U kunt ook een scheider aanbrengen tussen elke laag (zie ). Verder kunt u elementen van Palleteigenschappen gebruiken om eenvoudig de plaatsing van uw pallet aan te passen. Voor meer informatie over elementen, zie Volg de paragraaf Een palletiseringsprogramma maken hieronder om het palletiseringssjabloon te gebruiken.
|
| Een palletiseringsprogramma maken |
|
| Een palletiseringsprogramma maken |
|
| Wizard Bij elk object |
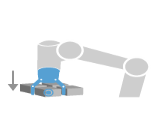
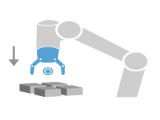
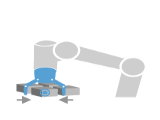
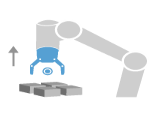
De wizard Bij elk object helpt bij het definiëren van de bij elk object op een pallet uit te voeren acties, zoals het Referentiepunt, de Naderingswaypoint, de Gereedschapactiepunt-waypoint en de Verlatingswaypoint (beschreven in onderstaande tabel). De waypoints Benaderen en Afsluiten van elk object blijven dezelfde oriëntatie en richting houden, ongeacht de oriëntatie van de verschillende objecten.
|
| Handmatige configuratie |
|
| (A) Scheiderwizard |
|
| (B) Handmatige configuratie |
|
| Opties voor het aanpassen van een palletiseringsprogramma |
U kunt uw palletiseringsprogramma aanpassen op de volgende manieren:
|
| Posities |
|



| Acties |
|