Beperking van gereedschapspositie
| Details |
Gereedschapspositie heeft twee belangrijke voordelen:
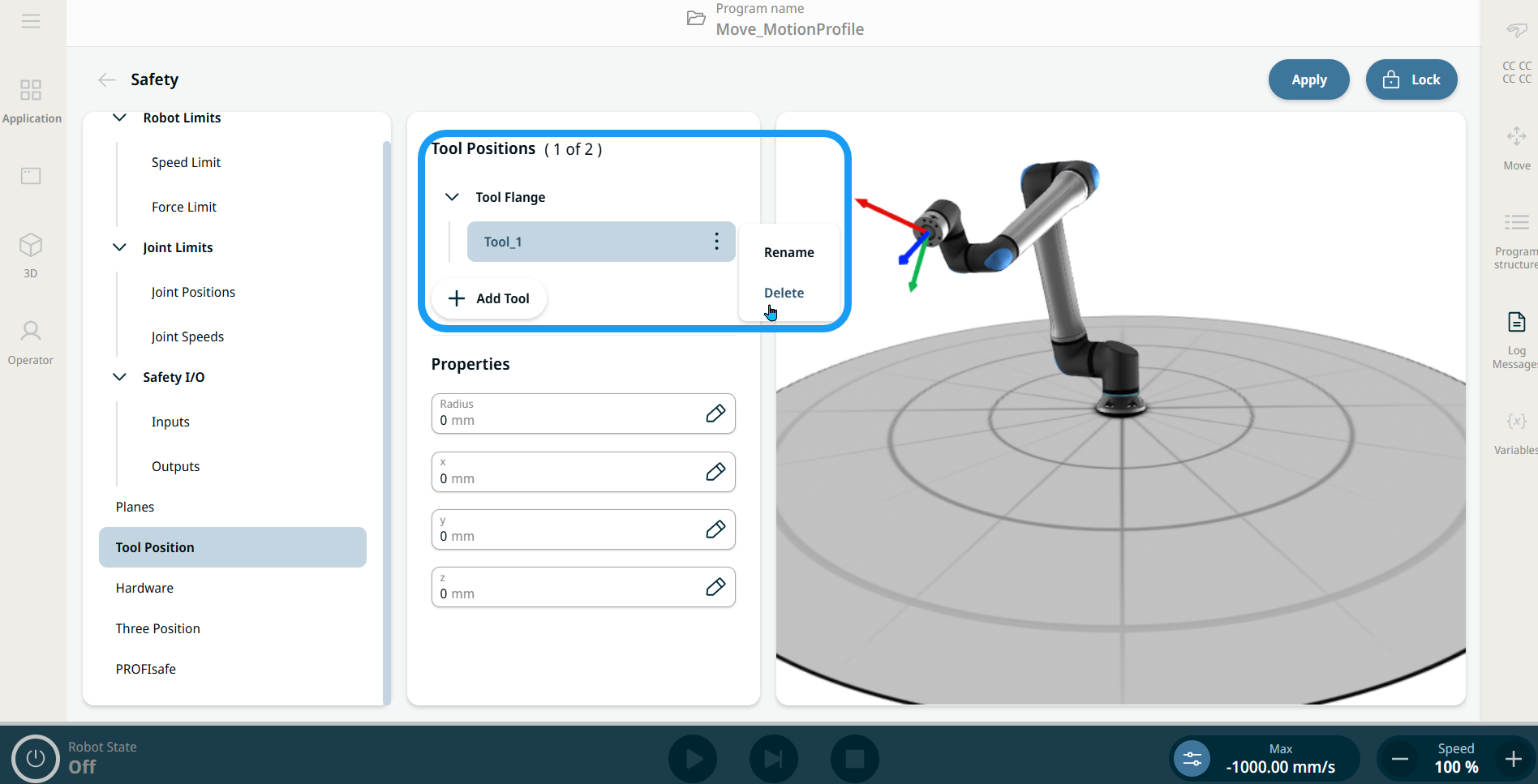
U kunt maximaal twee gereedschapsposities definiëren, configureren en beheren.
|
| Door de gebruiker gedefinieerde gereedschappen |
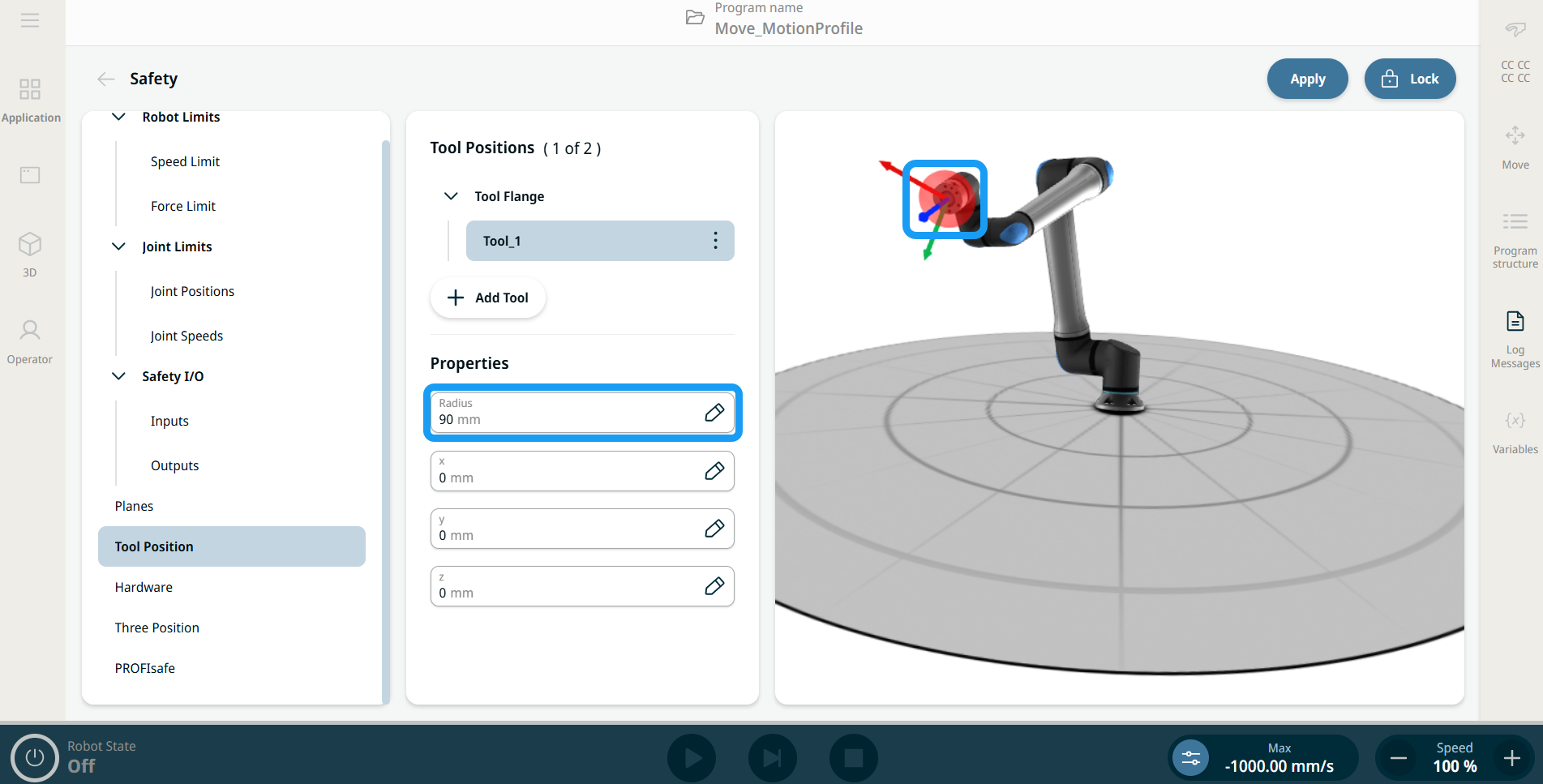
Voor de door de gebruiker gedefinieerde tools kan de gebruiker het volgende wijzigen:
|
|
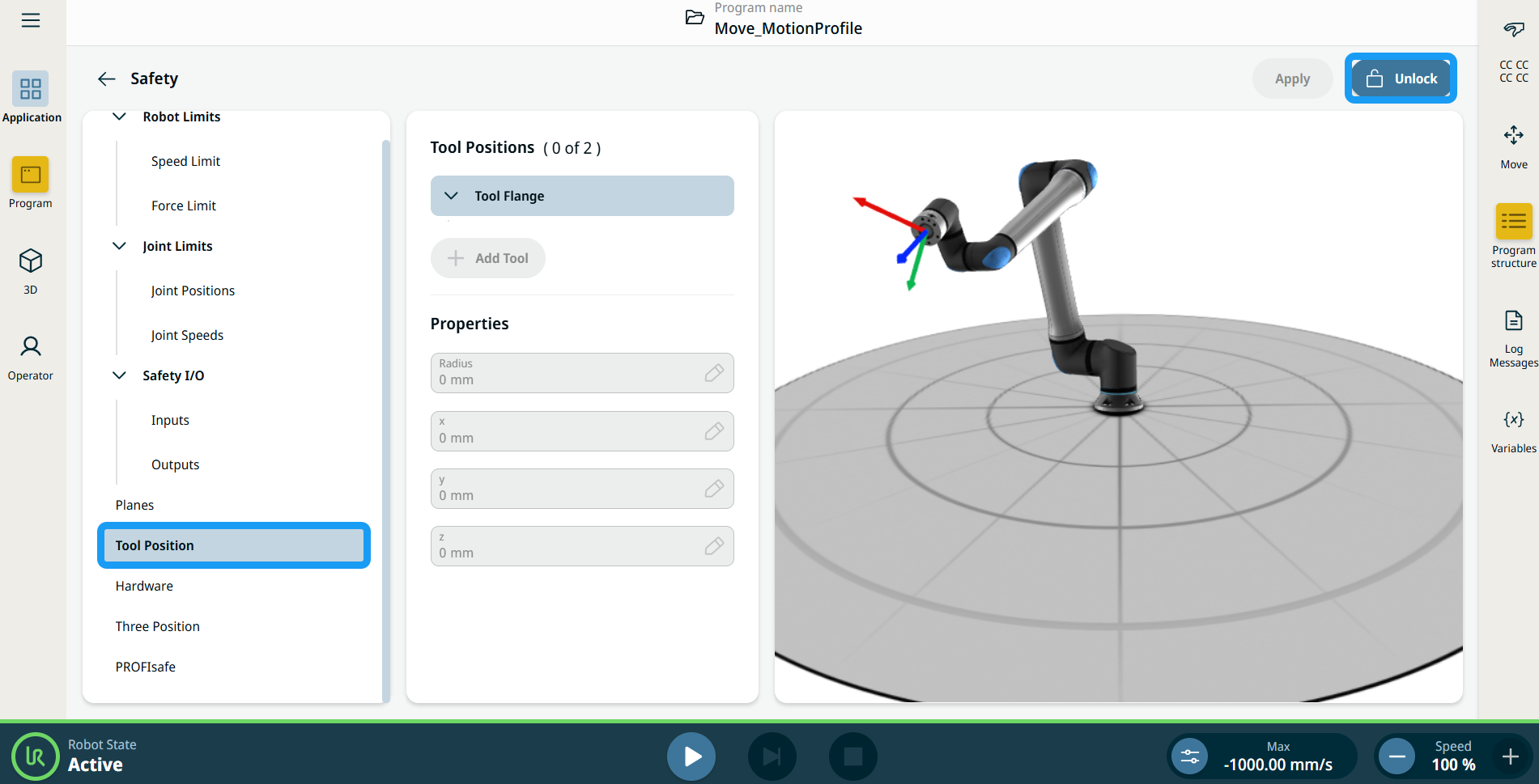
Om naar Gereedschapspositie te gaan |
|
|
|
|
|
|
|