모드버스
| 설명 |
여기서 MODBUS 클라이언트 (마스터) 신호를 설정할 수 있습니다. 지정된 IP 주소의 MODBUS 서버 (또는 슬레이브) 에 대한 연결은 입출력 신호 (레지스터 또는 디지털) 로 생성할 수 있습니다. 각 신호에는 고유한 이름이 있으므로 프로그램에서 사용할 수 있습니다.
|

| 새로 고침 |
이 버튼을 눌러 모든 MODBUS 연결을 새로 고칩니다. 새로 고침하면 모든 모드 버스 장치가 분리되고 다시 연결됩니다. 모든 통계가 지워집니다.
|
| 유닛 추가 |
새 MODBUS 장치를 추가하려면 이 버튼을 누르십시오.
|
| 단위 삭제 |
이 버튼을 눌러 MODBUS 장치와 해당 장치의 모든 신호를 삭제합니다.
|
| 단위 IP 설정 |
여기에 MODBUS 장치의 IP 주소가 표시됩니다. 버튼을 눌러 변경합니다.
|
| 신호 추가 |
이 버튼을 눌러 해당 MODBUS 장치에 신호를 추가하십시오.
|
| 신호 삭제 |
이 버튼을 눌러 해당 MODBUS 장치에서 MODBUS 신호를 삭제합니다.
|
| 신호 주소 설정 |
이 필드는 원격 MODBUS 서버의 주소를 보여줍니다. 화면상의 키패드를 사용하여 다른 주소를 선택합니다. 유효한 주소는 원격 MODBUS 장치의 제조업체 및 구성에 따라 다릅니다.
|
| 신호 이름 설정 |
사용자는 화면 키보드를 사용하여 신호에 이름을 지정할 수 있습니다. 이 이름은 신호가 프로그램에서 사용될 때 사용됩니다.
|
| 신호 값 |
여기서, 신호의 전류값이 나타난다. 레지스터 신호의 경우, 값은 부호 없는 정수로 표현됩니다. 출력 신호의 경우 버튼을 사용하여 원하는 신호 값을 설정할 수 있습니다. 다시 말하지만, 레지스터 출력을 위해 유닛에 쓸 값은 부호 없는 정수로 제공되어야 합니다.
|
| 신호 연결 상태 |
이 아이콘은 신호를 올바르게 읽고 쓸 수 있는지 (녹색), 또는 장치가 예기치 않게 응답하거나 연결할 수 없는 경우 (회색) 를 나타냅니다. MODBUS 예외 응답이 수신되면 응답 코드가 표시됩니다. MODBUS-TCP 예외 응답은 다음과 같습니다.
|
| 고급 옵션 표시 |
이 확인란은 각 신호에 대한 고급 옵션을 표시하거나 숨깁니다.
|
| 고급 옵션 |
모든 카운터는 최대 65535까지 계산한 다음 다시 0으로 줄 바꿈합니다.
|
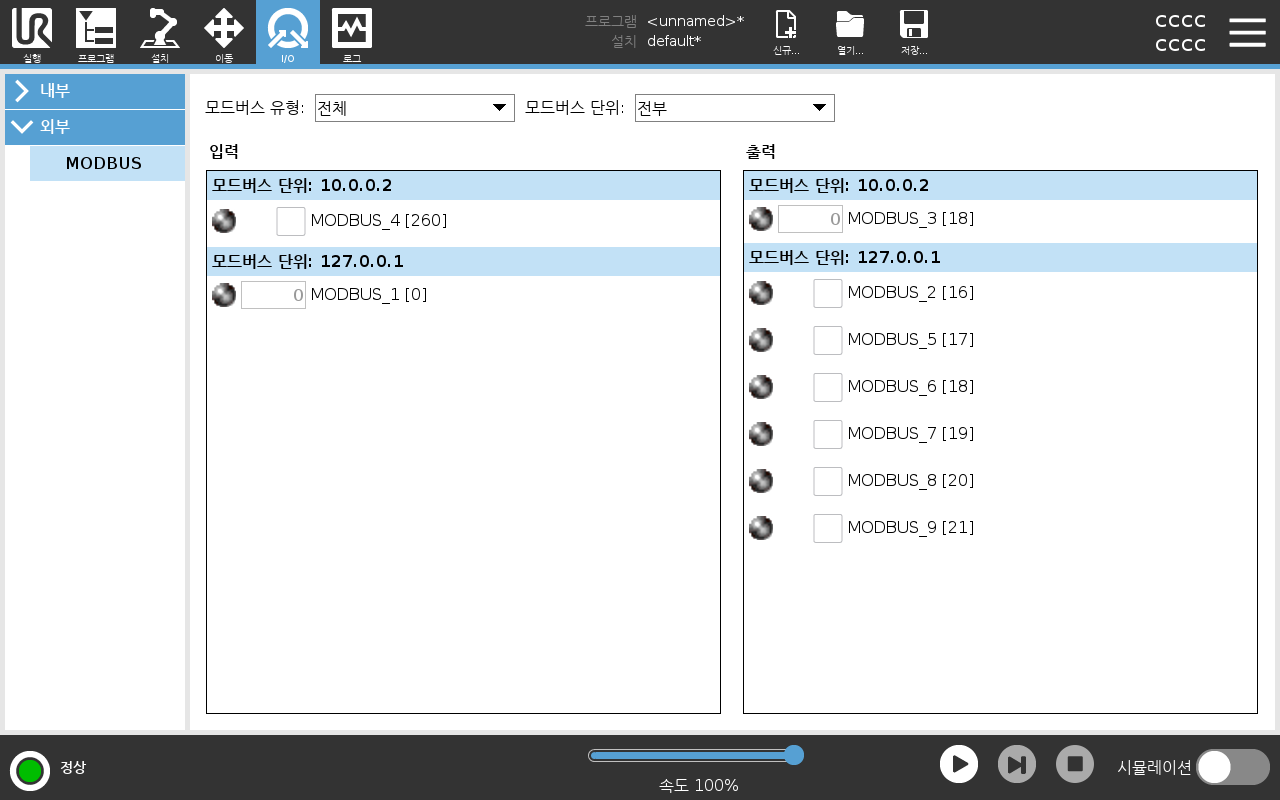
MODBUS 클라이언트 IO
| 설명 |
MODBUS 클라이언트 I/O는 설치 시 설정된 대로 신호를 보냅니다. 화면 상단의 드롭다운 메뉴를 사용하여 신호 유형에 따라 표시되는 콘텐츠를 변경할 수 있으며, 둘 이상이 구성된 경우 MODBUS 장치를 변경할 수 있습니다. 목록의 각 신호에는 연결 상태, 값, 이름 및 신호 주소가 포함된다. 출력 신호는 연결 상태와 I/O 탭 컨트롤에 대한 선택이 허용하는 경우 토글할 수 있다.
|