안전 플레인
| 설명 |
안전 플레인은 로봇 작업 영역, 툴 및 엘보우를 제한합니다. 안전 평면 정의는 로봇 팔의 전체 제한이 아닌 정의된 도구 구와 팔꿈치만 제한합니다. 안전 플레인을 정의해도 로봇 암의 다른 부분이 이 유형의 제한을 따른다는 것은 보장되지 않습니다. |
| 안전 플레인 구성 |
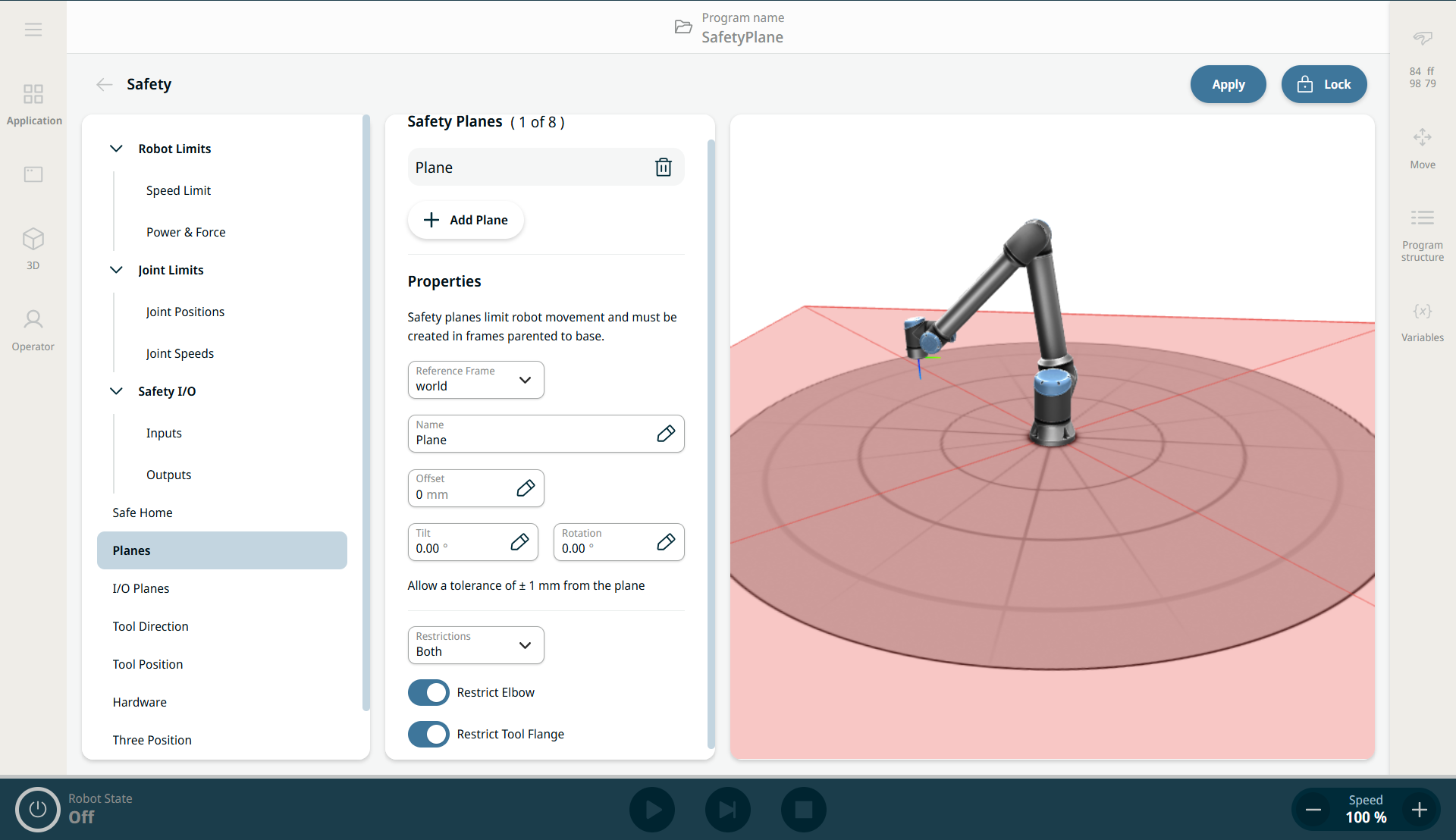
아래와 같은 속성을 사용하여 안전 플레인을 구성할 수 있습니다.
아래와 같은 제한을 사용하여 각 플레인을 구성할 수 있습니다.
|
| 엘보우 조인트 제한 |
이 기능은 기본적으로 활성화되어 있습니다. 엘보우 제한을 사용하면 모든 정의된 플레인을 로봇 엘보우 조인트가 통과하지 못하게 방지할 수 있습니다. 엘보우가 평면을 통과할 수 있도록 엘보우 제한을 비활성화합니다.
|
| 툴 플랜지 제한 |
툴 플랜지를 제한하면 툴 플랜지 및 부착된 툴이 안전 플레인을 교차하지 않게 방지됩니다. 툴 플랜지를 제한하는 경우, 제한되지 않는 영역은 툴 플랜지가 정상적으로 작동할 수 있는 안전 플레인 내부 영역입니다. 툴 플랜지는 안전 플레인 외부의 제한 영역을 교차할 수 없습니다. 제한을 제거하면 툴 플랜지가 안전 플레인을 넘어 제한된 영역으로 이동할 수 있으며, 부착된 툴은 안전 플레인 내부에 남아 있습니다. 큰 툴 오프셋으로 작업하는 경우 툴 플랜지 제한을 제거할 수 있습니다. 이렇게 하면 툴이 이동할 수 있는 추가 거리가 허용됩니다. 툴 플랜지를 제한하려면 플레인 특징을 생성해야 합니다. 플레인 특징은 나중에 안전 설정에서 안전 플레인을 설정하는 데 사용됩니다.
|