持ち上げと取り扱い
| 説明 |
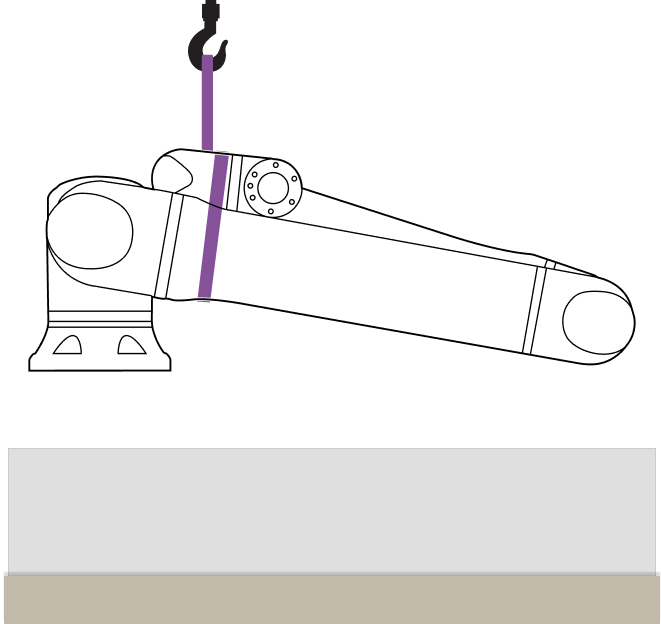
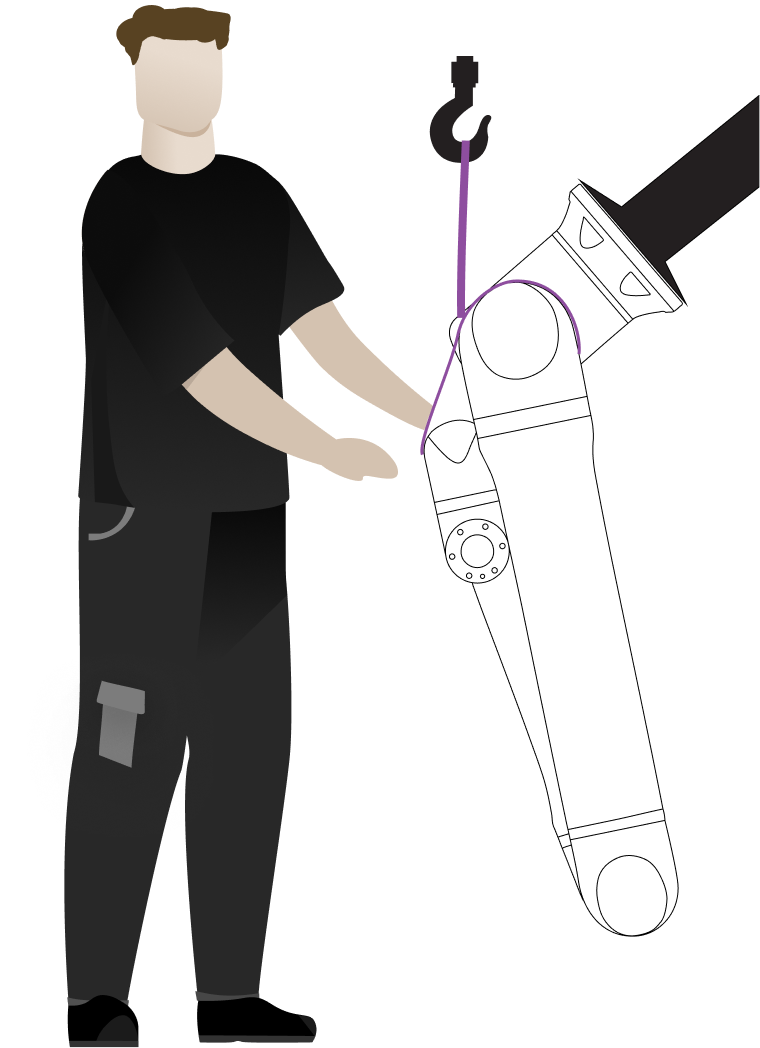
ロボットアームにはさまざまなサイズと重量のものがあるため、各モデルに適した揚重および取り扱い方法を用いることが重要です。 ここでは、ロボットを安全に持ち上げて取り扱う方法に関する情報を確認できます。
|
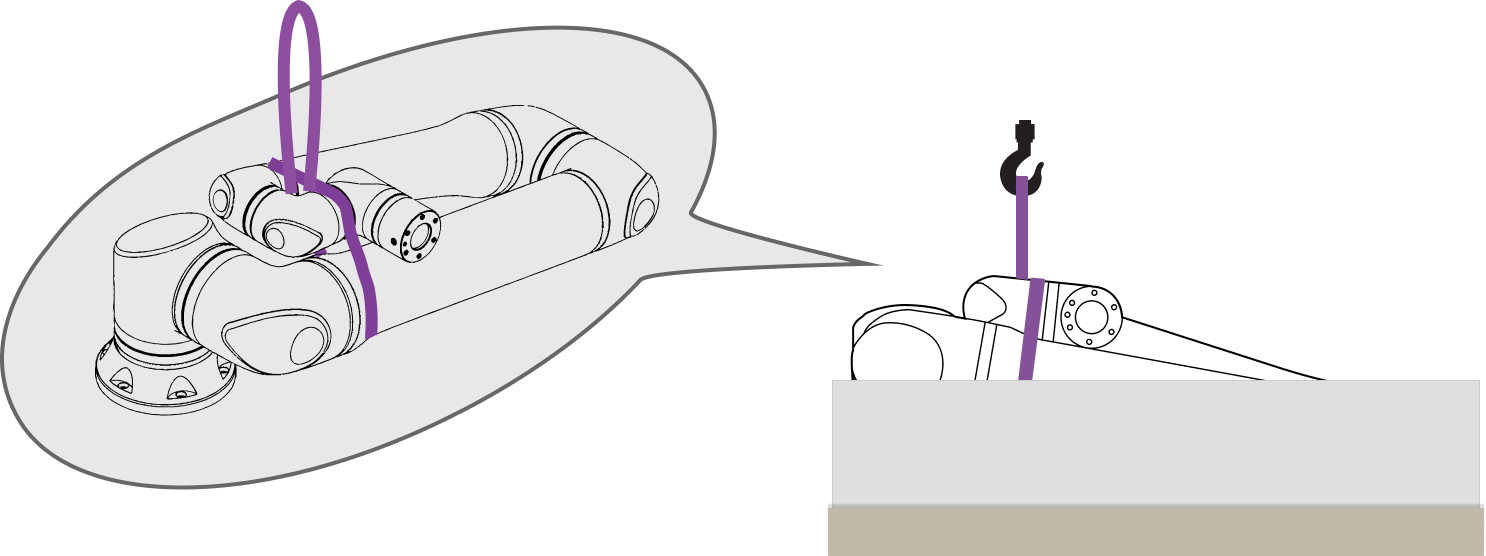
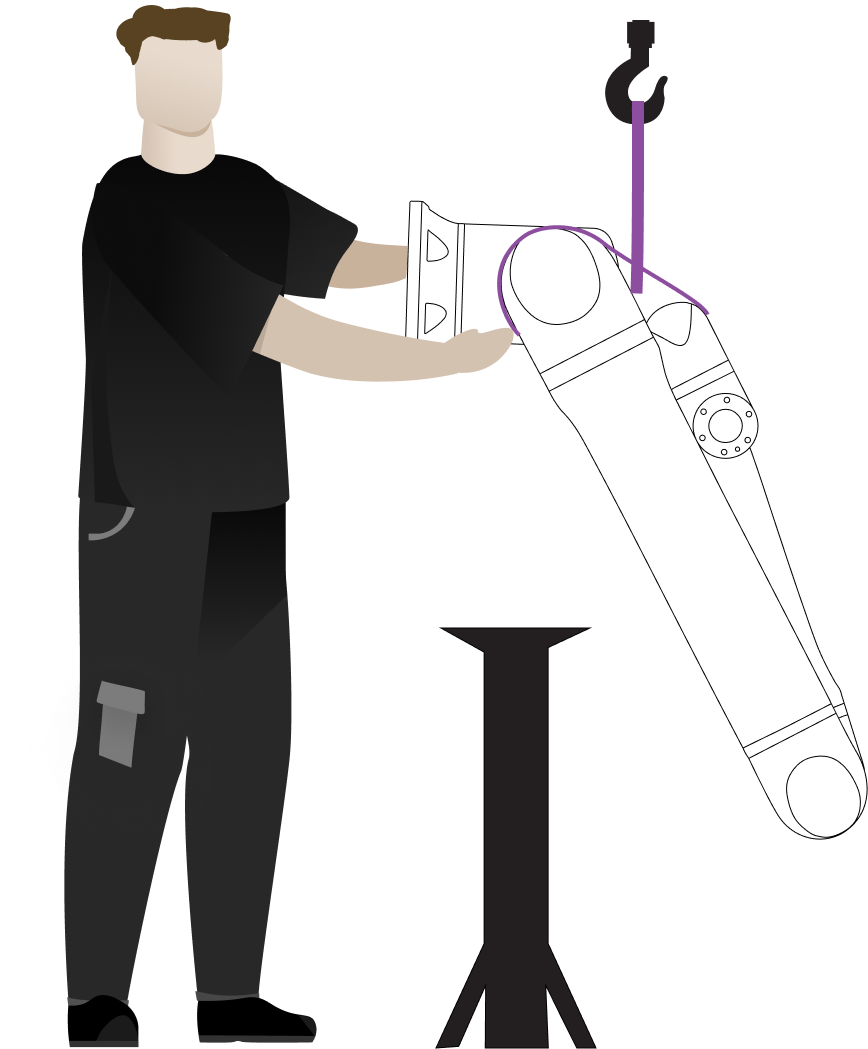
| 適切な揚重と取り扱い |
|
|
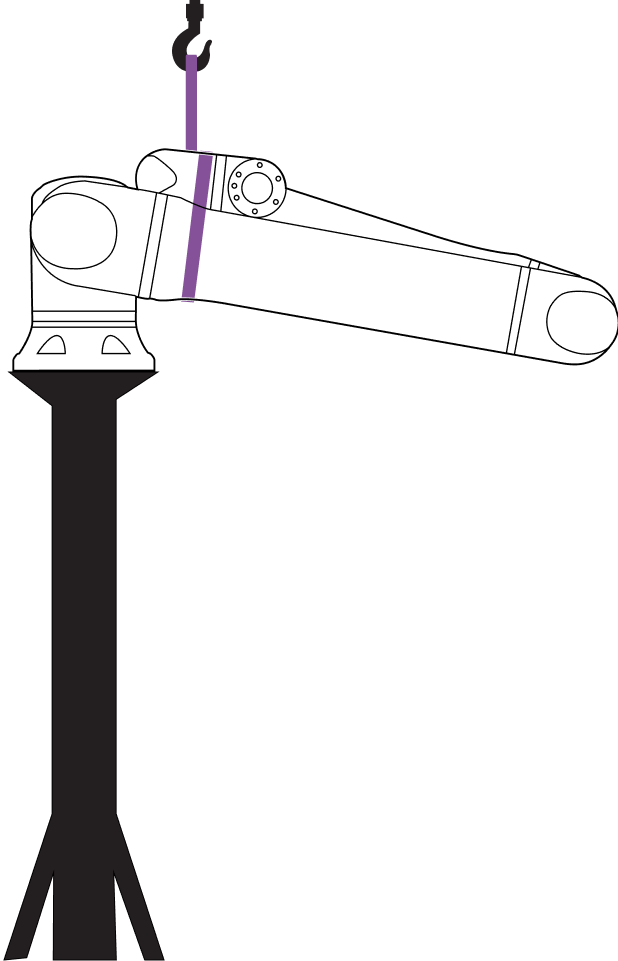
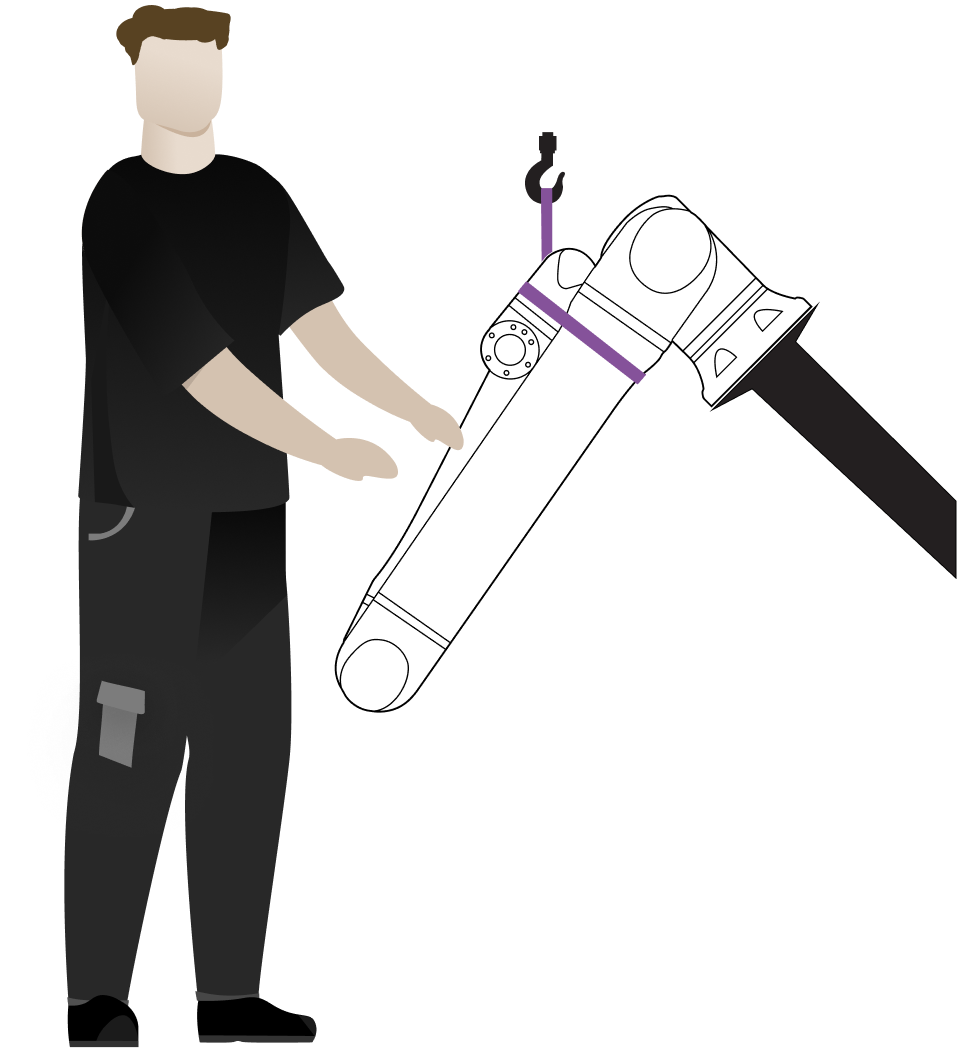
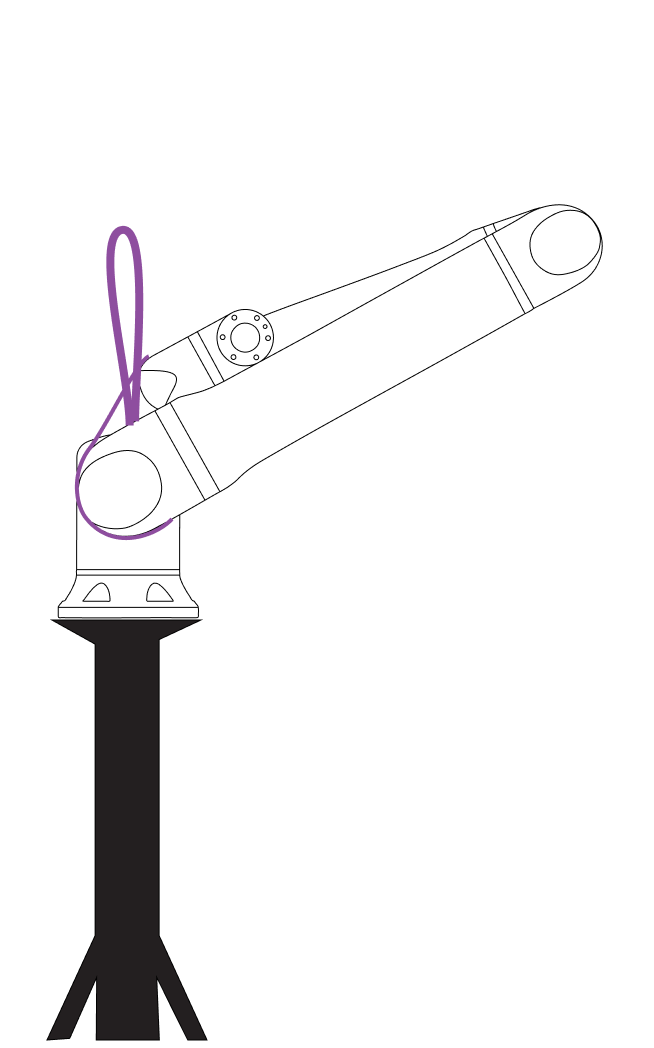
| ロボットアームの据え付け |
ロボットアームは、横向き、逆さま、または角度を付けて(± 45°)据え付けることができます。
|
|
|
|
重い部品の持ち上げや移動は怪我の原因となります。
部品の組み立ておよび/または配線を間違えてしまうと怪我の原因となります。
|
|
|
お住まいの地域では、組み立ての際の揚重に関する特定の規制がある場合があります。
取り付けの詳細については、「組み立て」のセクションを参照してください。
|