初回起動
| 説明 |
初回起動とは、組み立て後のロボットの最初の一連のアクションです。 この最初の一連のアクションでは、次のことを行う必要があります。
|
|
ロボットアームを起動する前に荷重と設置設定を確認しないと、人身傷害や物的損害の原因となります。
荷重と設置設定が正しくないと、ロボットアームとコントロールボックスが正しく機能しません。
低温でロボットを起動すると、温度に依存する油とグリースの粘度により、パフォーマンスが低下したり、停止したりする可能性があります。
|
ロボットの電源を入れる
| ロボットの電源の入れ方 |
ロボットの電源を入れると、コントロールボックスがオンになり、ティーチペンダントの画面にディスプレイが読み込まれます。
|
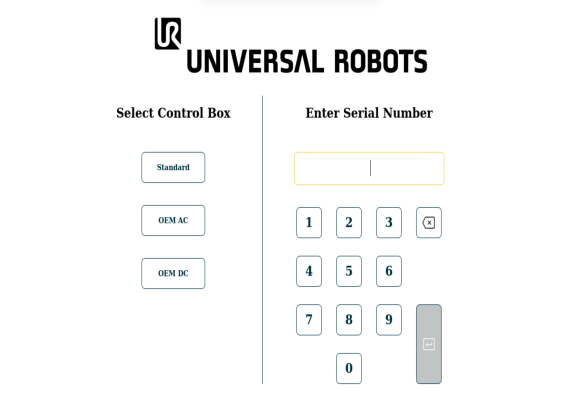
シリアル番号の入力
| シリアル番号の入力方法 |
ロボットの設置設定を初めて行うときは、ロボットアームに記載されているシリアル番号を入力する必要があります。 この手順は、ソフトウェアを再インストールする場合にも必要です。 例えば、ソフトウェアのアップデートをインストールする場合などです。 |
|
|
スタート画面が読み込まれるまでに数分かかる場合があります。
|
ロボットアームの起動
| ロボットを起動する方法 |
ロボットアームを起動するとブレーキシステムが解除され、ロボットアームを動かし、PolyScope X の使用を開始できるようになります。
|


ロボットアームの状態がアイドルから通常に変わると、センサーデータが設定済みのロボットアームの取り付け状態と照合されます。 取り付けが確認されたら、開始をタップしてすべてのジョイントブレーキの解除を続け、ロボットアームを操作可能な状態にします。
|

ロボットの電源を切る
| ロボットアームの電源の切り方 |
予期せぬ起動や動作により、怪我をする恐れがあります。
以下の操作が可能になりました:
|