Panoramica di PolyScope X
| Panoramica |
PolyScope X è l'interfaccia grafica utente (GUI) installata sul Teach Pendant che aziona il braccio del robot tramite touch screen. L'interfaccia PolyScope X consente di creare, caricare ed eseguire programmi. Aggiornare sempre il software all'ultima versione.
|
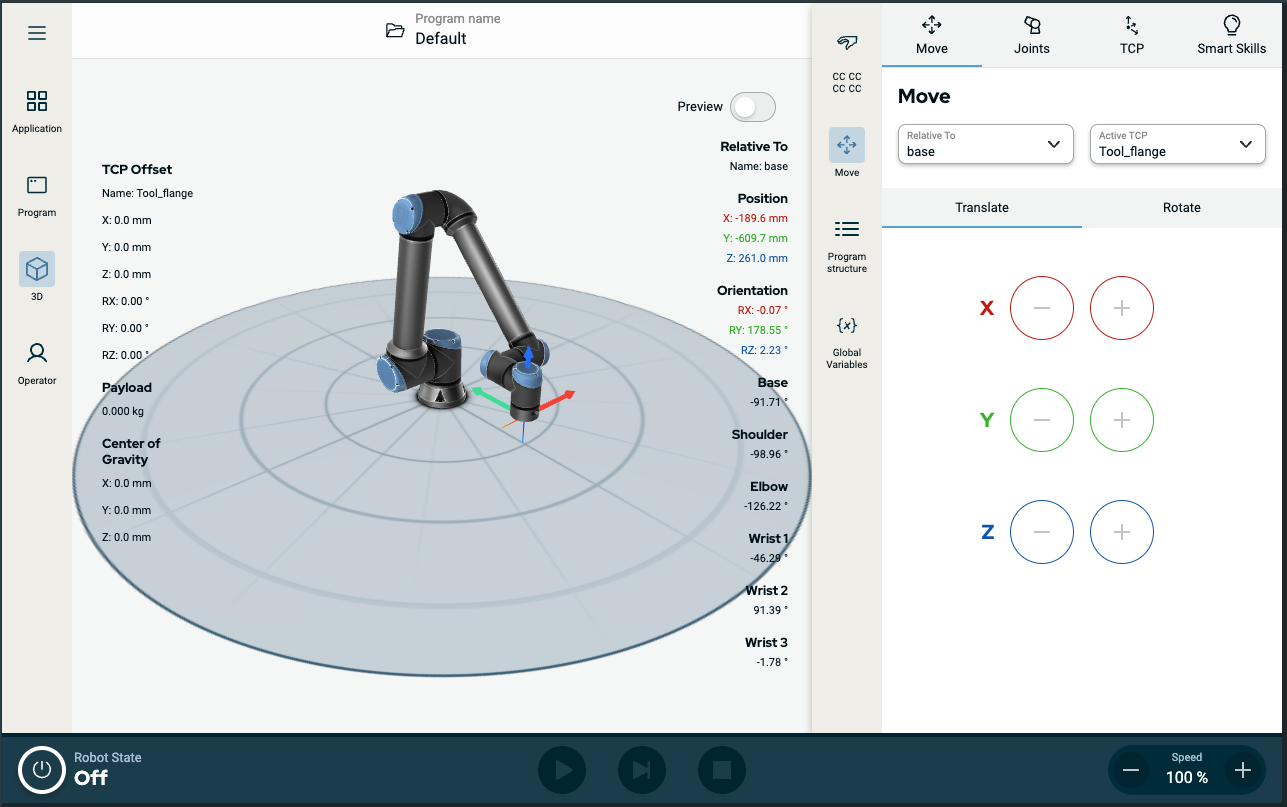
| Per visualizzare la schermata principale |
|
 nella navigazione principale. Ciò offrirà una visione tridimensionale del braccio del robot con coordinate X-Y-Z.
nella navigazione principale. Ciò offrirà una visione tridimensionale del braccio del robot con coordinate X-Y-Z.




| Combinazioni di schermate |
La schermata principale e la schermata multitask costituiscono la combinazione della schermata operativa per il robot. La schermata multitask è indipendente dalla schermata principale, in modo da poter eseguire attività separate. Ad esempio, è possibile configurare un programma nella schermata principale mentre si sposta il braccio del robot nella schermata multitask. È anche possibile nascondere la schermata multitask se non è necessaria.
|
| Per mostrare/nascondere la schermata multitask |
|