Primo avvio
| Descrizione |
Il primo avvio è la sequenza iniziale di azioni che è possibile eseguire con il robot dopo il montaggio. Questa sequenza iniziale richiede di:
|
|
La mancata verifica del carico utile e dell'installazione prima di avviare il braccio del robot può causare lesioni al personale e/o danni materiali.
Le impostazioni di carico utile e installazione errate impediscono il corretto funzionamento del braccio del robot e dell'unità di controllo.
L'avvio del robot a temperatura più bassa può comportare prestazioni inferiori o arresti, a causa della viscosità dell'olio e del grasso, che dipendono dalla temperatura.
|
Accensione del robot
| Per accendere il robot |
L'accensione del robot provoca l'accensione dell'unità di controllo e il caricamento del display sulla schermata TP.
|
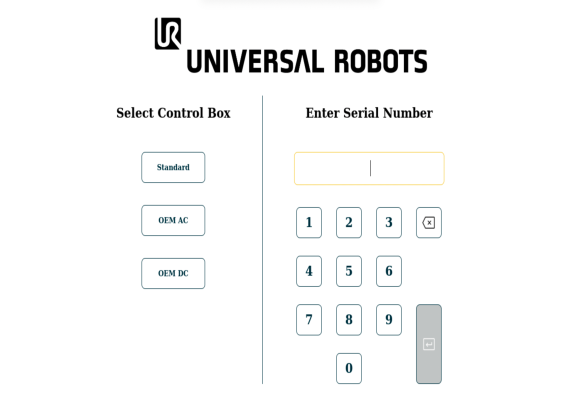
Inserimento del numero di serie
| Per inserire il numero di serie |
L'installazione del robot per la prima volta richiede l'inserimento del numero di serie sul braccio del robot. Questa procedura è necessaria anche quando si reinstalla il software. Ad esempio, quando si installa un aggiornamento software. |
|
|
Il caricamento della schermata iniziale può richiedere alcuni minuti.
|
Avvio del braccio del robot
| Per avviare il robot |
L'avvio del braccio del robot disattiva il sistema frenante, consentendo di iniziare a muovere il braccio del robot e utilizzare PolyScope X.
|


Quando lo stato del braccio del robot passa da Inattivo a Normale, i dati del sensore vengono controllati rispetto al montaggio configurato del braccio del robot. Se il montaggio è verificato, toccare AVVIA per continuare a rilasciare tutti i freni dei giunti, preparando il braccio del robot per l'uso.
|

Spegnimento del robot
| Per interrompere l'alimentazione del braccio del robot |
Un avvio e/o un movimento imprevisto possono causare lesioni.
Ora è possibile:
|