PROFIsafe
| Descrizione |
Il protocollo di rete PROFIsafe (implementato nella versione 2.6.1) consente al robot di comunicare con un PLC di sicurezza in conformità ai requisiti della norma ISO 13849, Cat 3 PLd. Il robot trasmette informazioni relative alla sicurezza a un PLC di sicurezza e riceve informazioni relative alla sicurezza. Le comunicazioni relative alla sicurezza possono essere messaggi di stato o servire ad attivare una funzione di sicurezza (ad es. impostazioni ridotte, arresto). I comandi di arresto sono descritti in conformità alla norma IEC 60204-1, in cui l'Arresto di emergenza è un arresto di Categoria 1 e l'arresto di sicurezza è un arresto di Categoria 2.
L'interfaccia PROFIsafe fornisce un'alternativa sicura e basata sulla rete per collegare i fili ai pin IO di sicurezza della scatola di controllo del robot. L'utilizzo dell'interfaccia PROFIsafe garantisce il rispetto delle specifiche di sicurezza funzionale del robot UR (PL, categoria e PFH). Per ulteriori dettagli, consultare la sezione "Tabella delle funzioni di sicurezza" nel manuale UR. Ad esempio, il "safeguard stop" è di categoria PLd 3 con un valore PFH inferiore a 1,8E-07 (1,8 x 10-7).
PROFIsafe è disponibile solo su robot che hanno una licenza abilitante, che puoi ottenere contattando il tuo rappresentante di vendita locale. Dopo aver ottenuto la licenza, scaricarla da myUR. Per informazioni relative alla registrazione del robot e all'attivazione della licenza, consultare la sezione "Registrazione del robot e file di licenza URCap".
|
| PLC Di Sicurezza Dentro |
Un messaggio di stato inviato dal robot al PLC di sicurezza contiene le informazioni mostrate nella seguente tabella.
|
||||||||||||||||
|
|
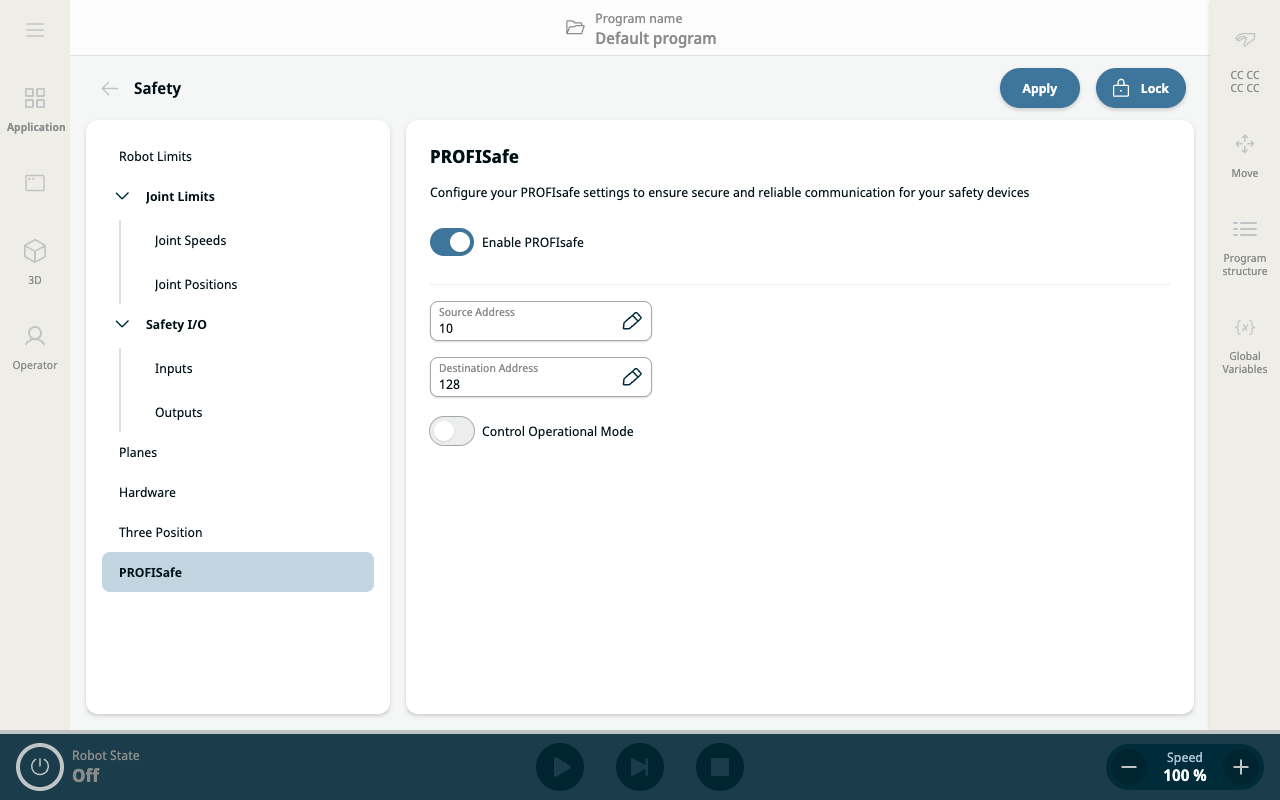
| Configurazione di PROFIsafe |
|
|
|
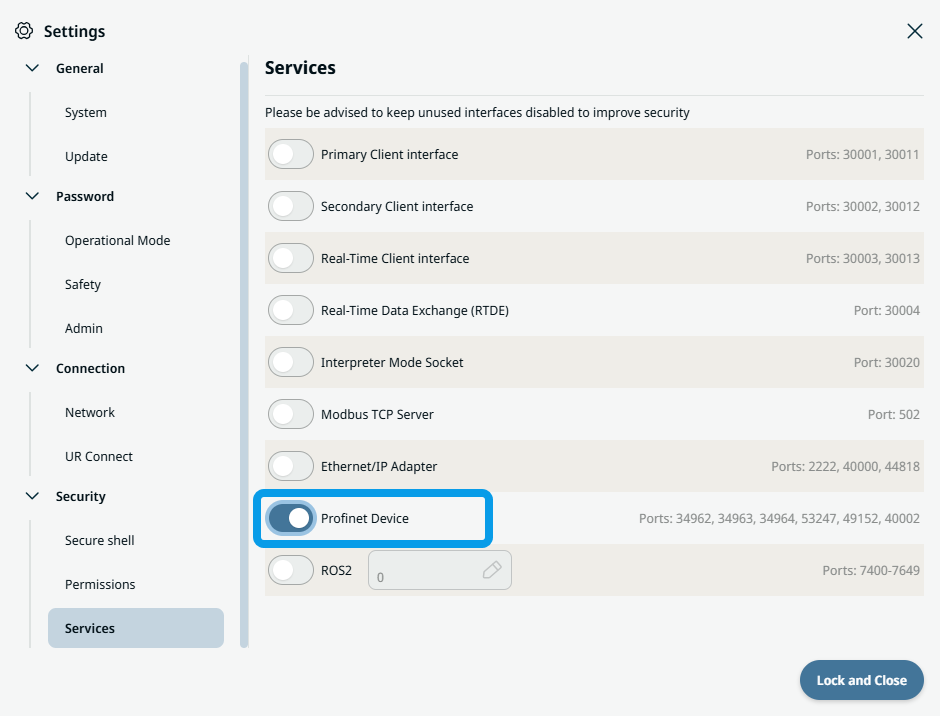
Per configurare e utilizzare PROFIsafe, il dispositivo Profinet deve essere abilitato nel menu delle impostazioni dei servizi di sicurezza.
 Leggere per i dettagli e la posizione dell'interfaccia "Profinet".
|