Irány
| Leírás |
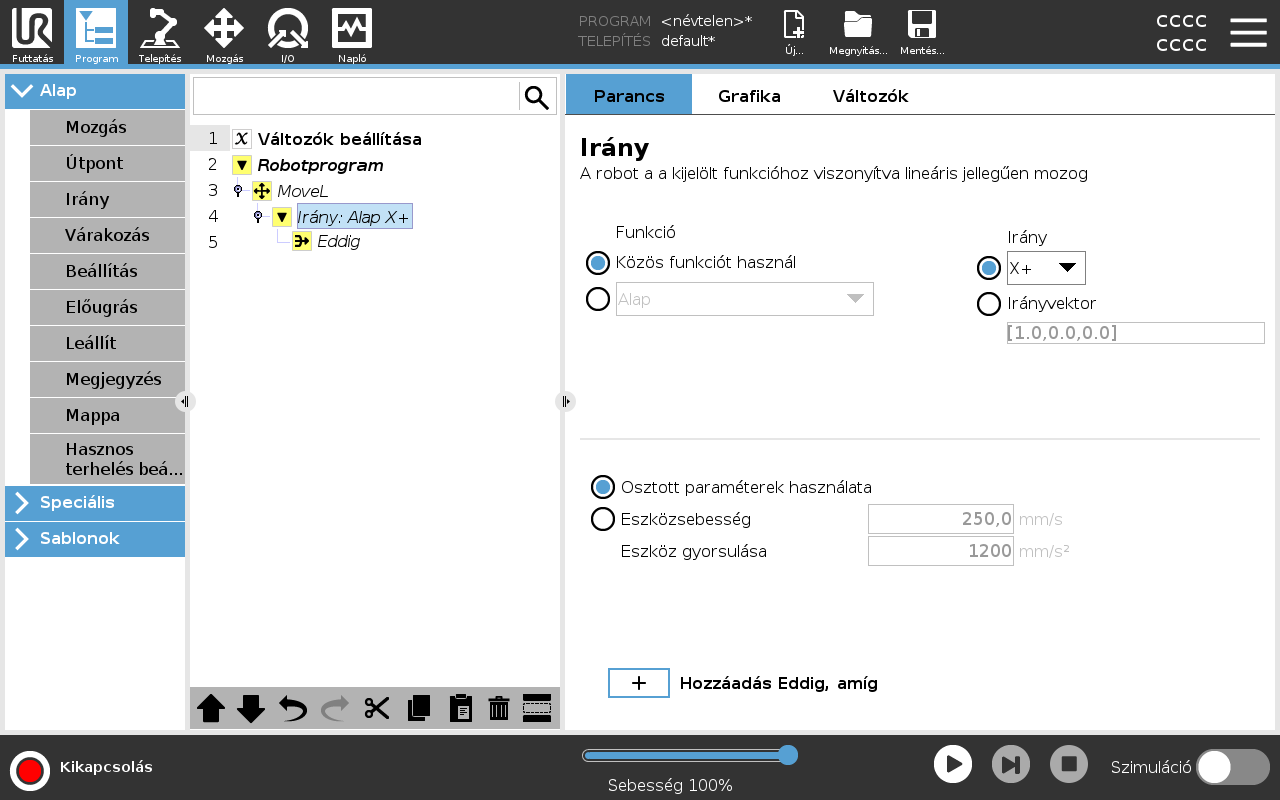
Az Irány program csomópont tulajdonság-tengelyekhez vagy TCP-khez viszonyított mozgatást határoz meg. A robot az Irány programcsomópont által meghatározott pályán mozog, amíg a mozgást egy Hozzáadás Eddig, amíg (Hozzáadás addig) feltétel le nem állítja.
|
| Irány |
Az Irány paranccsal a robotot egy konkrét irányba mozgathatja. |
| Példa |
Például a [100,0,0] és [1,0,0] irányvektorok ugyanolyan hatással vannak a robotra; használja a sebességcsúszkát, hogy a kívánt sebességgel mozogjon az x-tengely mentén. Az irányvektorban a számok értéke csak egymáshoz képest rendelkezik jelentéssel. |
| Irány mozgatás hozzáadása a robotprogramhoz |
|
|
Válassza ki a tulajdonságot és az irányt |
Különbség a Közös tulajdonság vagy az ALAP/SZERSZÁM között
Különbség az irány és az irányvektor beírása között
Az irányvektorok olyan kódolt egyéni kifejezést határoznak meg, amelynek megoldása egy egységvektor.
|