Hozzáadás Eddig, amíg
| Leírás |
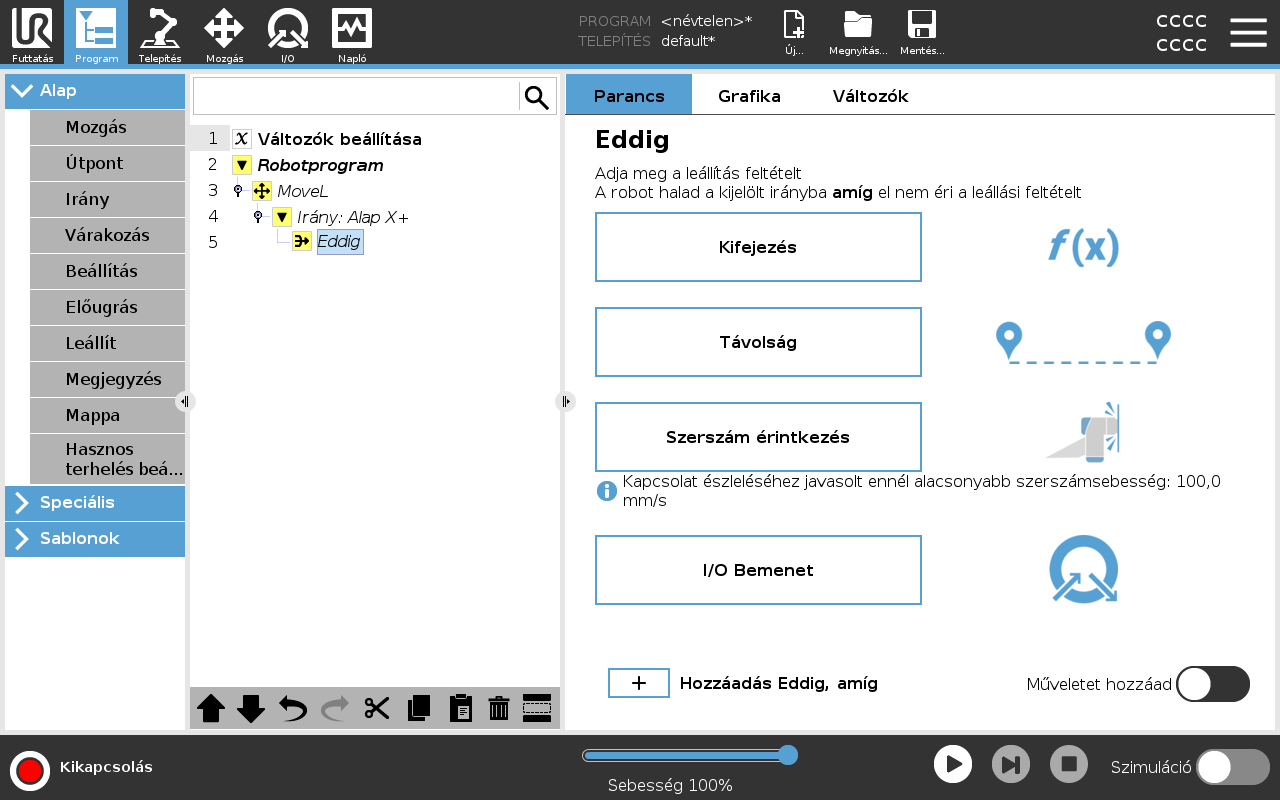
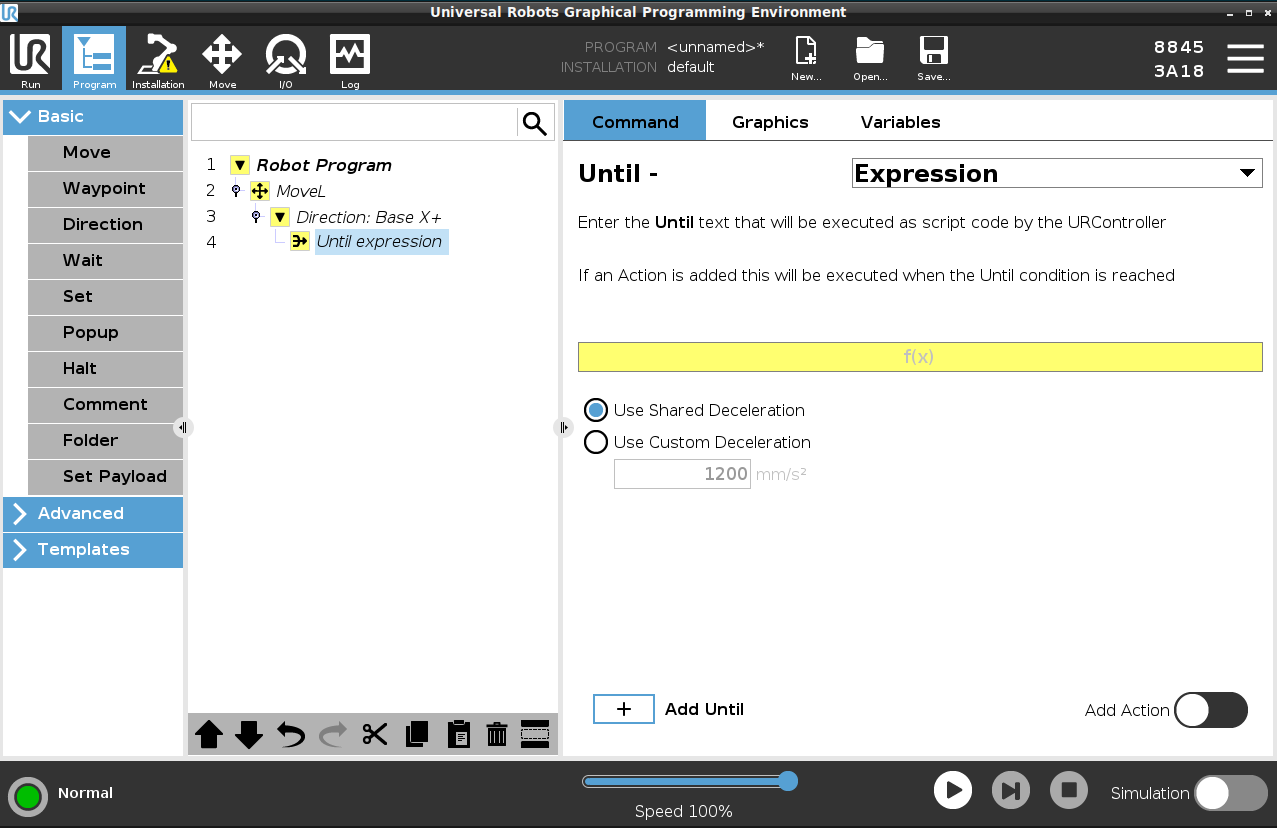
Az Eddig (Until) program csomópont leállási kritériumot határoz meg egy mozgatáshoz. Eddig (Until) csomópontokat a Direction (Irány) és Waypoint (Útpont) parancsokból adhat hozzá. Iránycsomópontot csak a MoveL és MoveP mozgatás parancsokhoz adhat hozzá. A robot egy út mentén mozog, és amikor érintkezőt észlel, megáll.
Egyetlen mozgatáshoz több megállási kritériumot is hozzáadhat. A mozgás akkor áll le, amikor az első Eddig feltétel teljesül. Egymás után több Hozzáad eddig (Add Until) opciót is hozzáadhat, mivel több feltételnek is teljesülnie kell egy művelet elvégzését vagy végrehajtását megelőzően.
|

| Műveletet hozzáad |
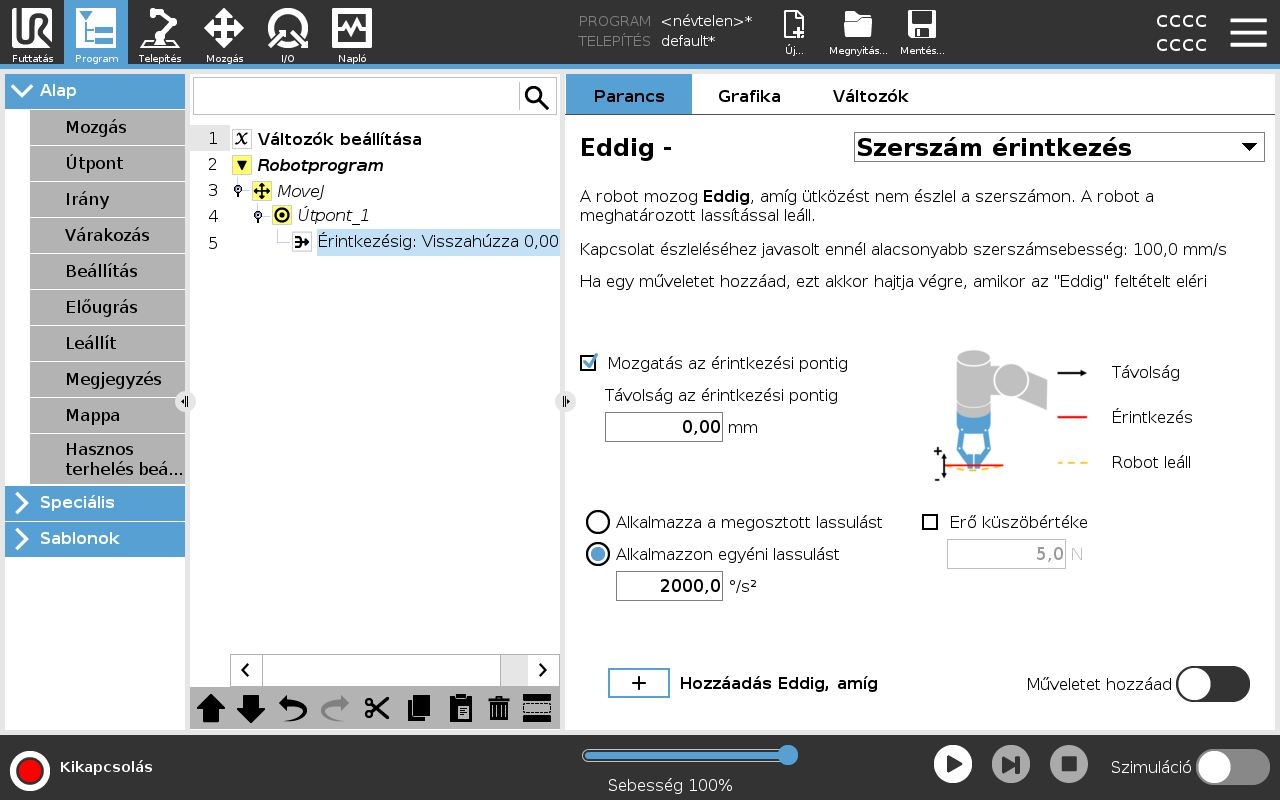
Ezzel a csomóponttal hozzáadhat egy programcsomópontot, ha egy adott Addig (Until) feltétel teljesül. Egy Addig (Until) parancs után közvetlenül végrehajtandó további műveletet is hozzáadhat. |
| Példa |
Amíg a Szerszámérintkezés (Tool contact) be nem kapcsolja a megfogó szerszám megfogó műveletét. Ha nincs Művelet meghatározva, akkor a program végrehajtása a Programfa következő program-csomópontján folytatódik.
|
| Nincs művelet hozzáadása a Until parancs után |
|