OptiMove
| Leírás |
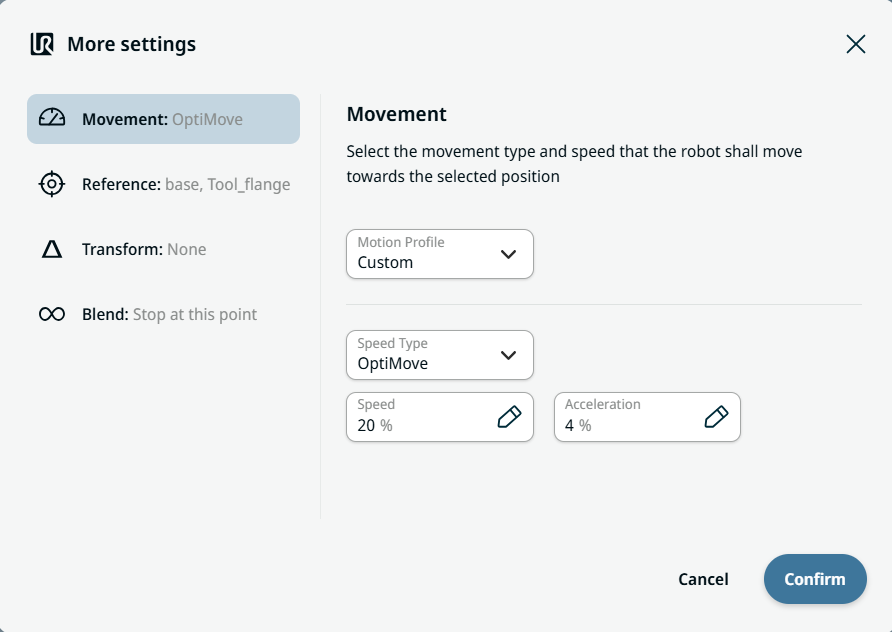
Az OptiMove mozgásérték a PolyScope X Joint és Linear Move parancsok egyik fejlett funkciója. Lásd: Ízület mozgatása és Lineáris mozgás.
Az OptiMove a következő előnyöket kínálja:
Az és az OptiMove kombinált hatása általában rövidebb ciklusidőt eredményez, a mozgás folyékonyabbá válik, és csökken a robot terhelése.
|
|
Az OptiMove eléréséhez |
|
|
|
|
|
|
|

 .
.