Biztonságos otthon
| Leírás |
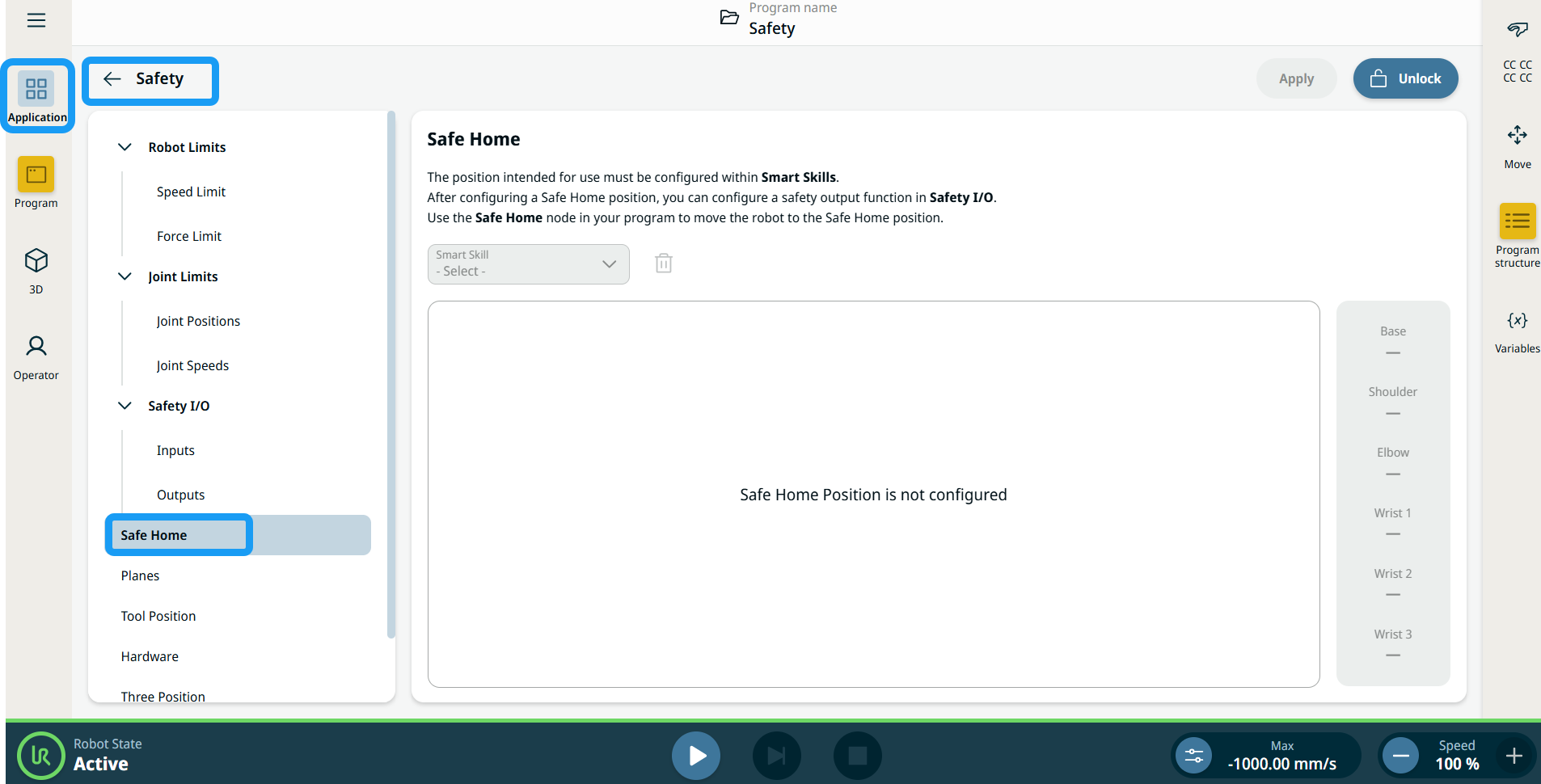
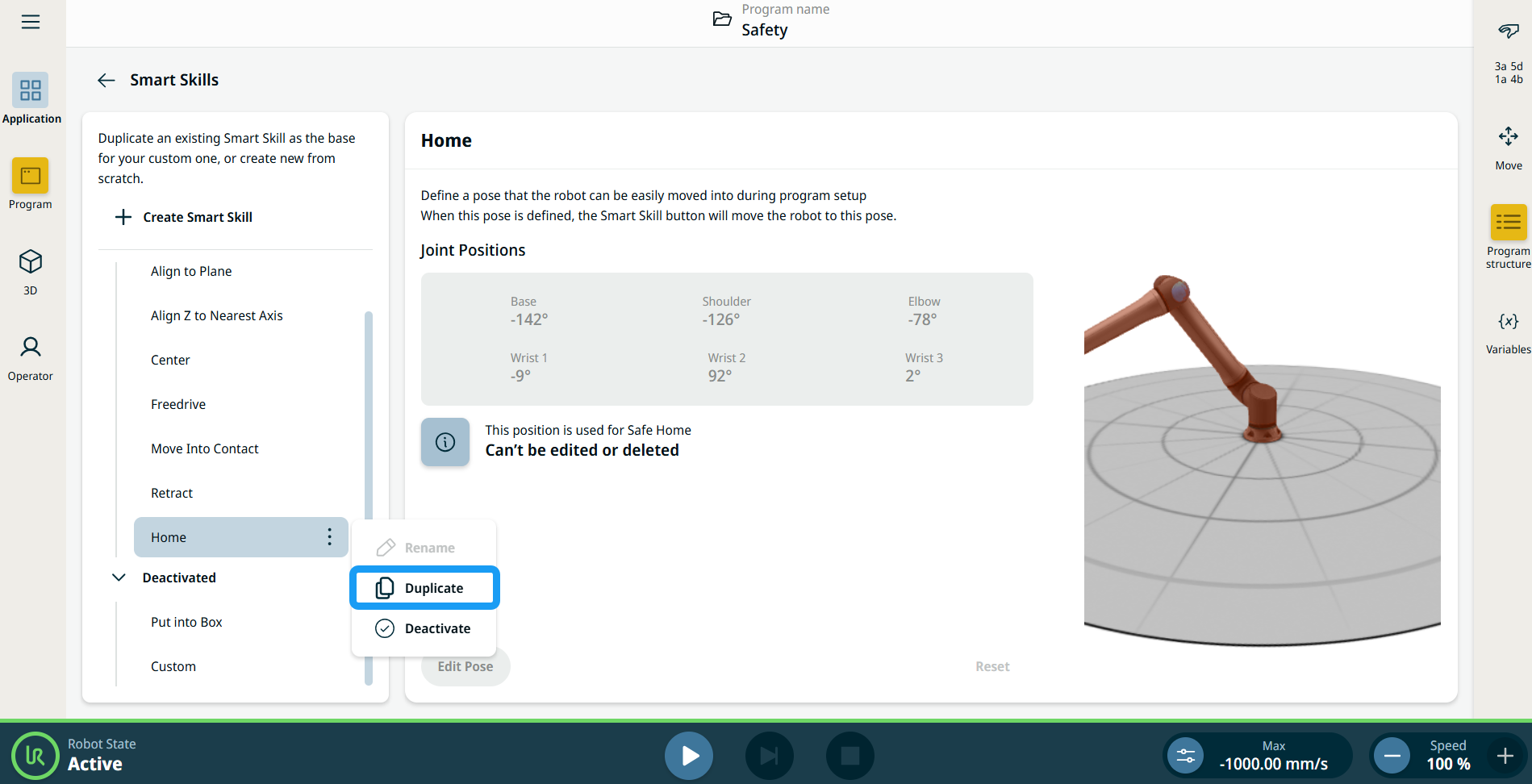
A Biztonsági alaphelyzet egy PolyScope X funkció, amely lehetővé teszi, hogy a felhasználók meghatározzanak egy biztonsági kimenetet, amely akkor aktiválódik, amikor a robot eléri a beállított biztonsági alaphelyzet pozícióját. A felhasználó a rendelkezésre álló intelligens készségek legördülő menüjéből kiválasztja az Alaphelyzet lehetőséget, amely a Biztonsági alaphelyzet referenciájaként határozható meg.
|
|
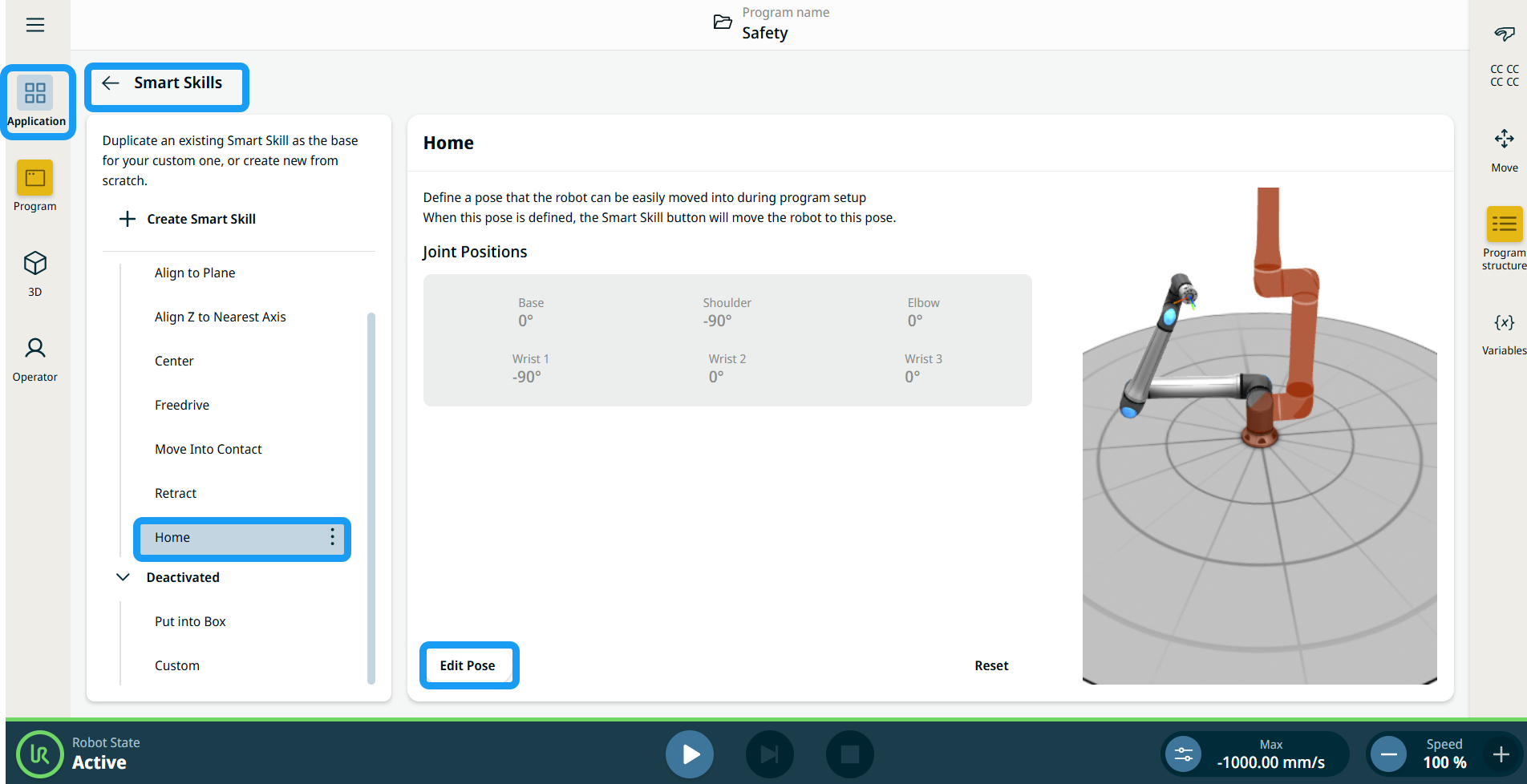
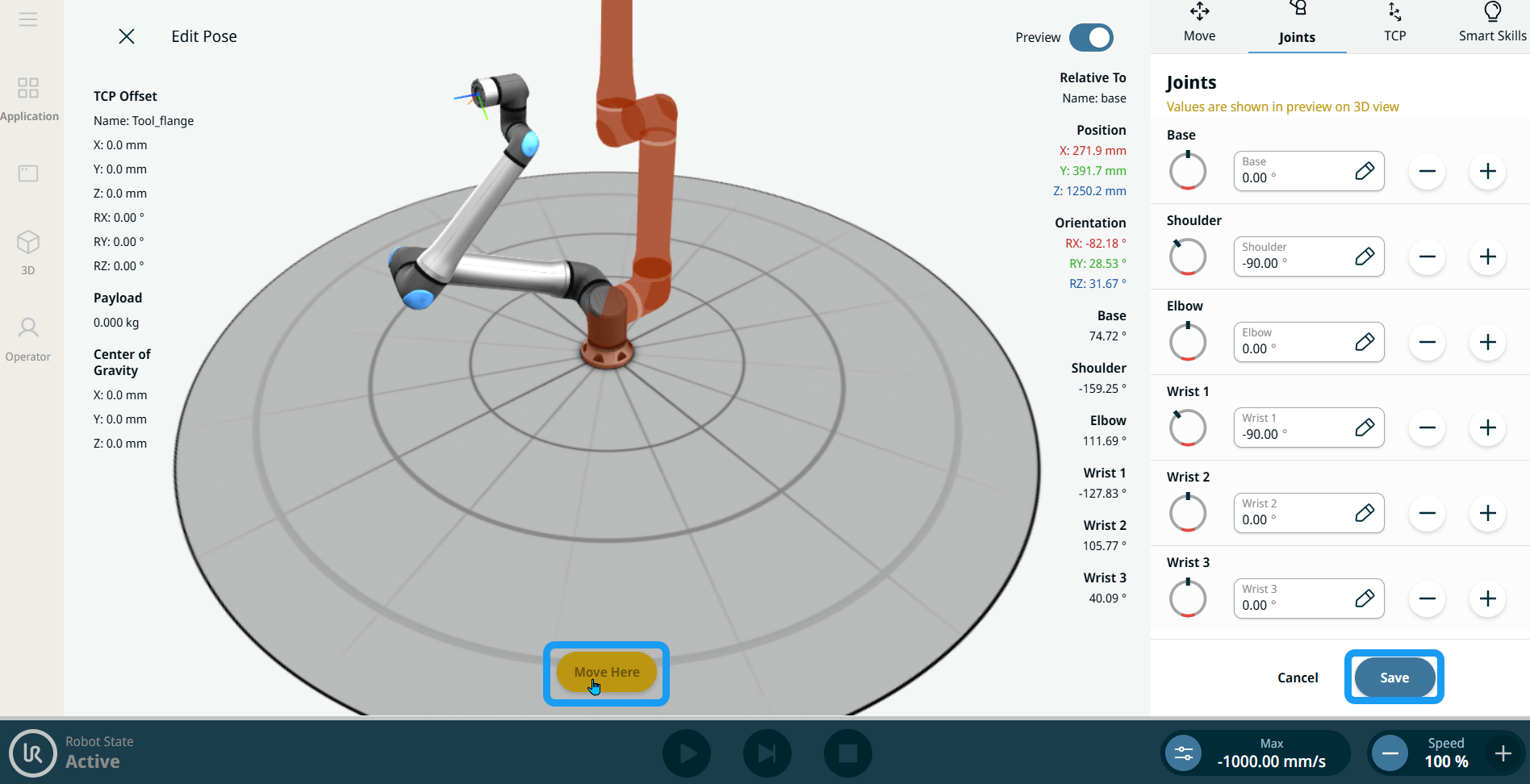
Biztonsági alaphelyzet elérése |
|
|
|
|
|
|
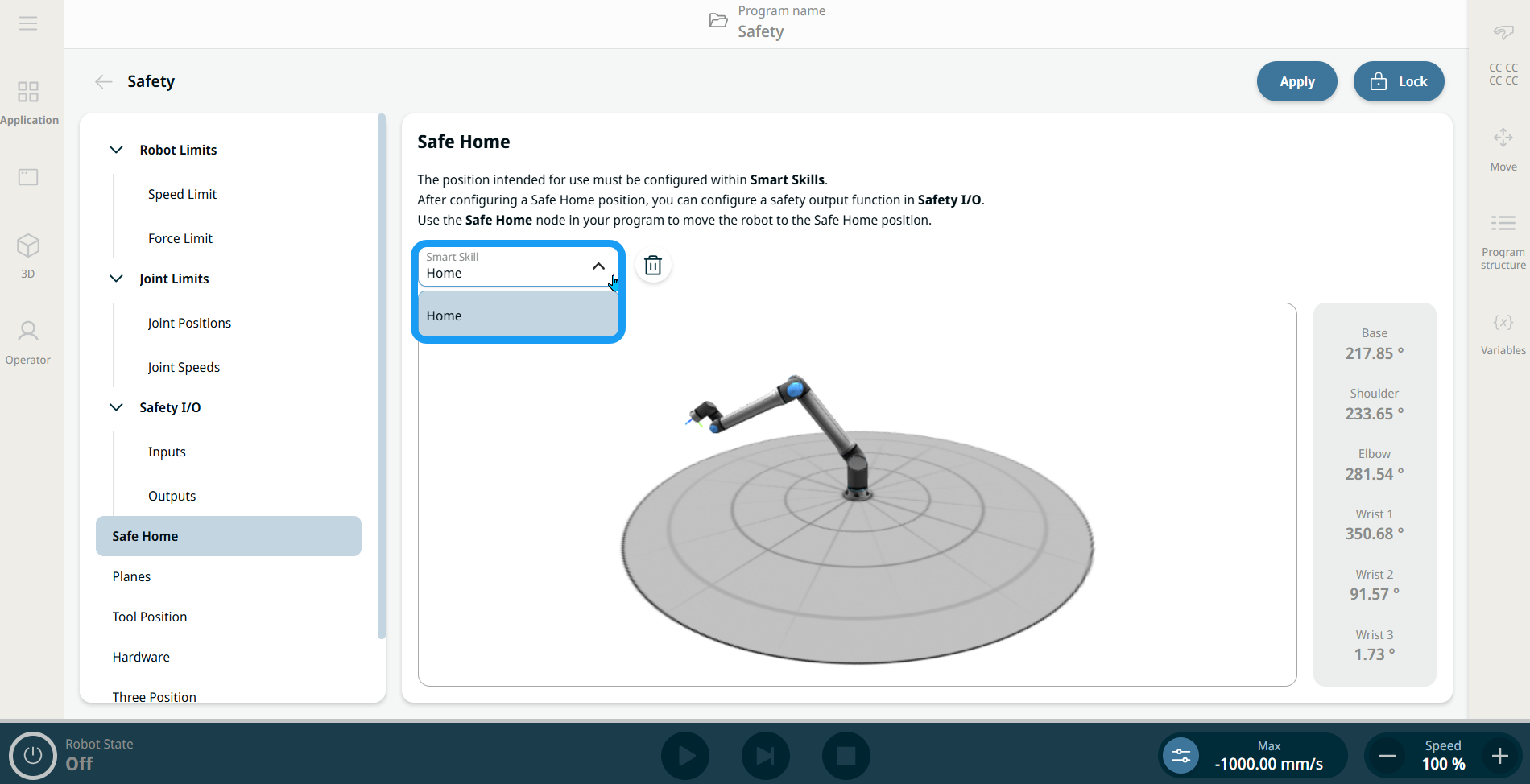
Ha a Position Smart Skill funkciót választja a Safe Home pozícióreferenciaként:
|
|
Biztonsági alaphelyzet funkció a kimenetekben |
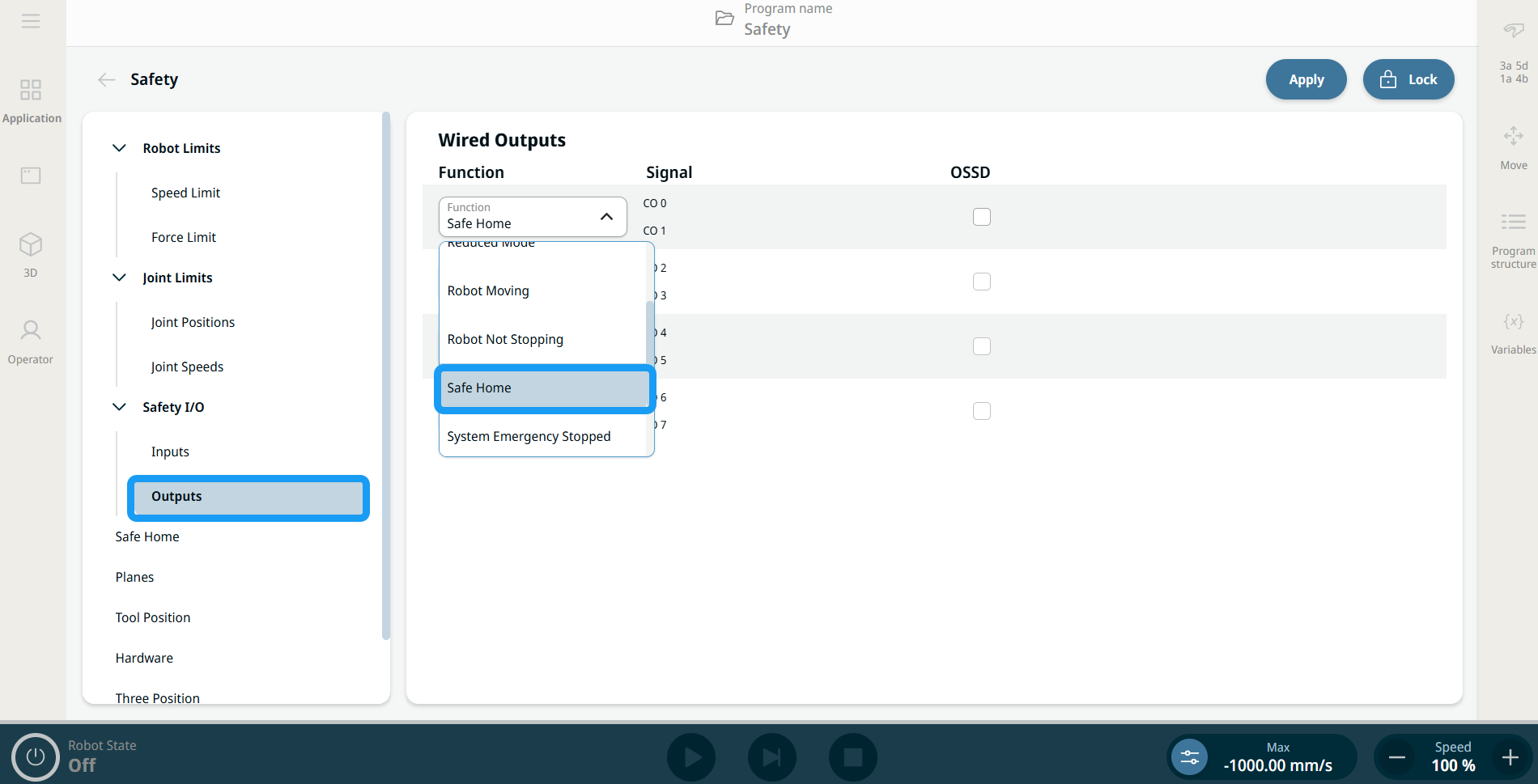
Ha az Alaphelyzet pozícióját hozzárendeli egy pozíció-intelligens funkcióhoz a Biztonság menüpontban, akkor a biztonsági kimeneti funkció legördülő menüjében új funkció-hozzárendelésként megjelenik a Biztonsági alaphelyzet. A Biztonsági I/O Kimenetek részében található Funkció mezőkben válassza a Biztonsági alaphelyzet lehetőséget.
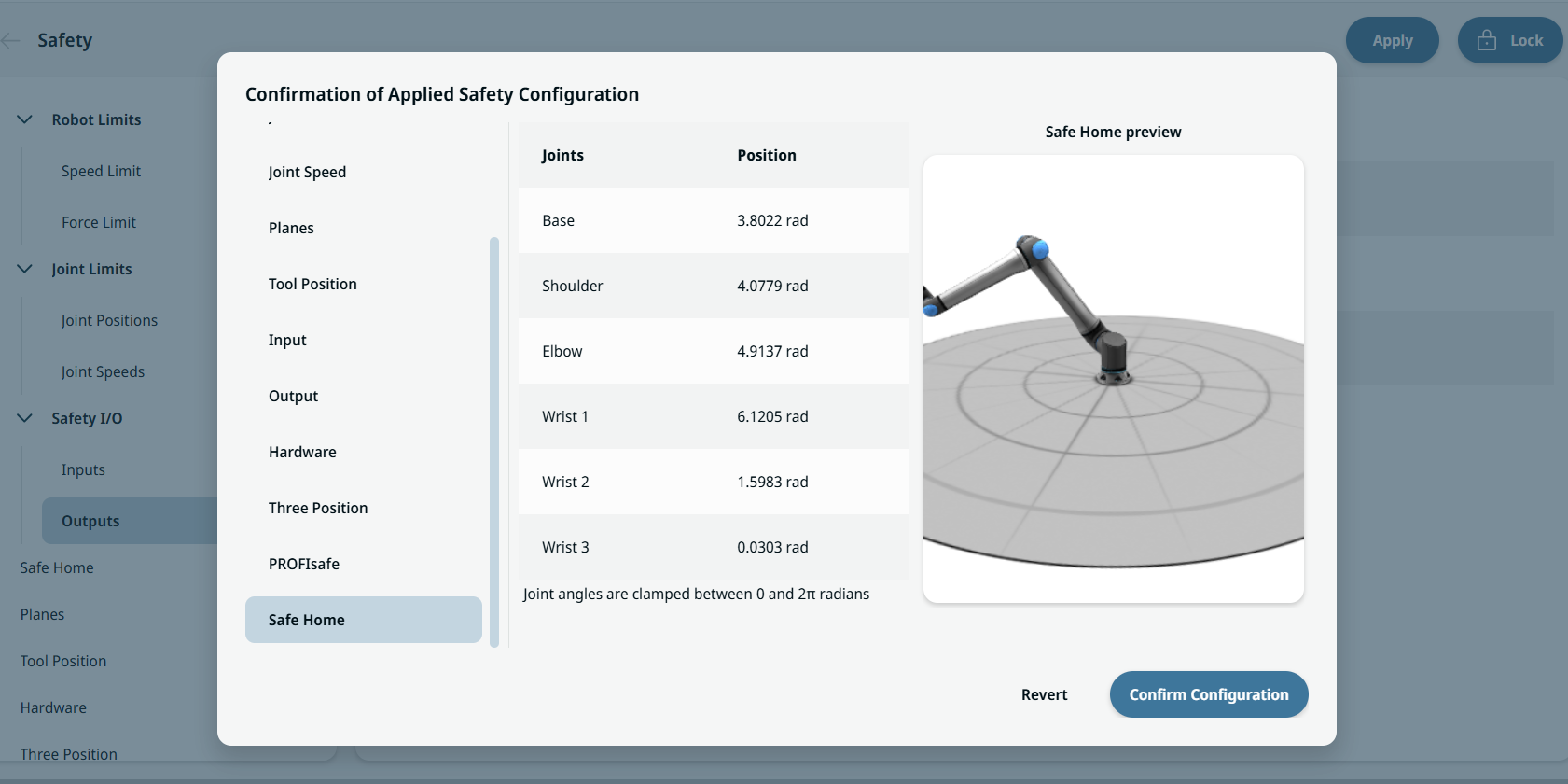
A Biztonsági alaphelyzet az Alkalmazott biztonsági konfiguráció megerősítése áttekintő párbeszédpanel funkció-hozzárendelési táblázatában látható.
|
|
Biztonsági alaphelyzet programcsomópontként |
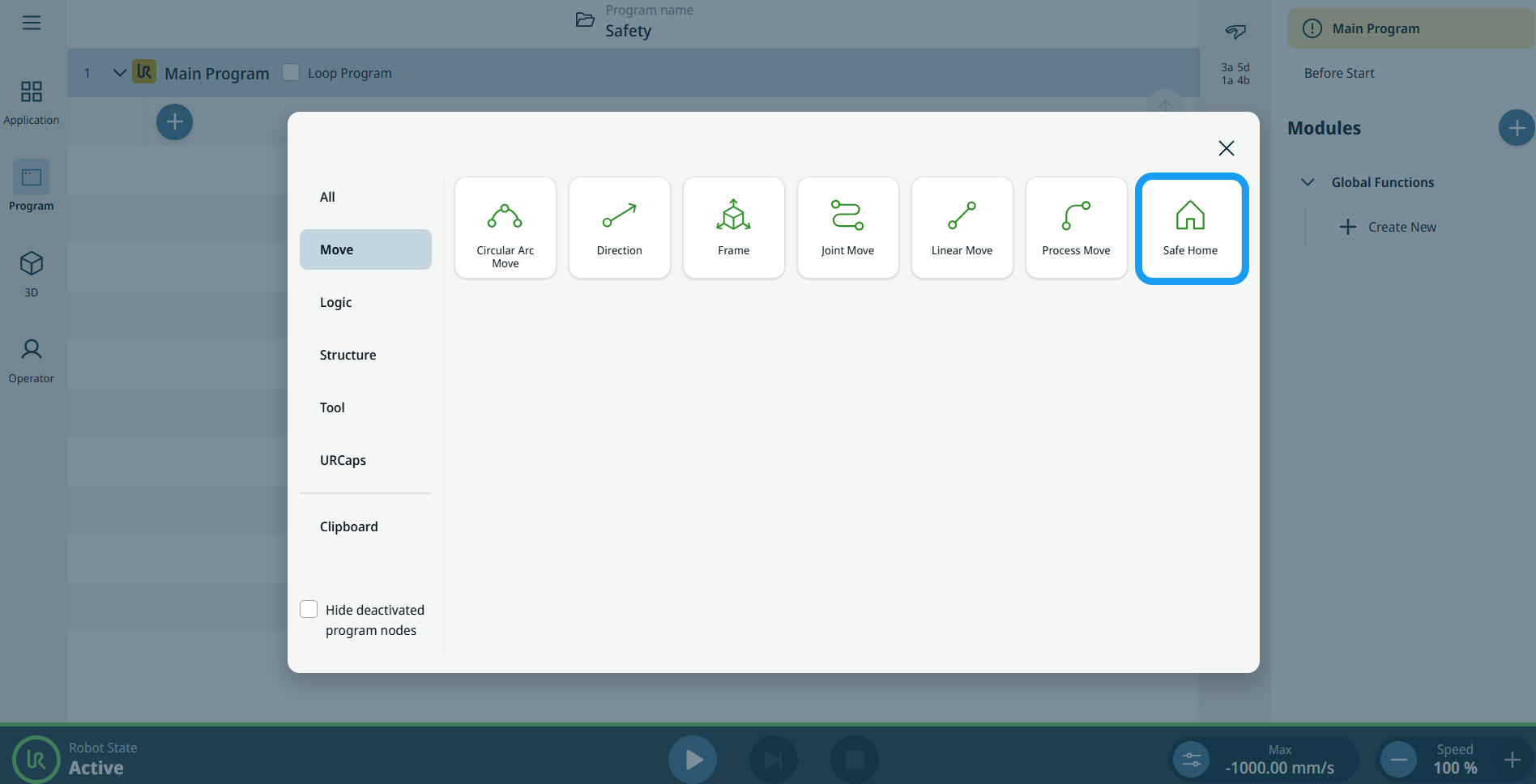
A Biztonsági alaphelyzet programcsomópont a Parancs csomópontok Mozgatás csomópontok kategóriája alatt található. Ez a csomópont arra szolgál, hogy a robotot a biztonságos alaphelyzetre vonatkozó biztonsági alkalmazás konfigurációjában előre meghatározott biztonsági alaphelyzetébe mozgassa.
Ha a csomópontot a biztonsági beállításokban konfigurált biztonsági alaphelyzet pozíciója nélkül adja hozzá, akkor a csomópont sárga színnel lesz jelölve.

A Biztonsági alaphelyzet parancscsomópontban mozgásprofilok és egyéb speciális beállítások érhetők el a három pontos ikonra
|
 koppintva.
koppintva.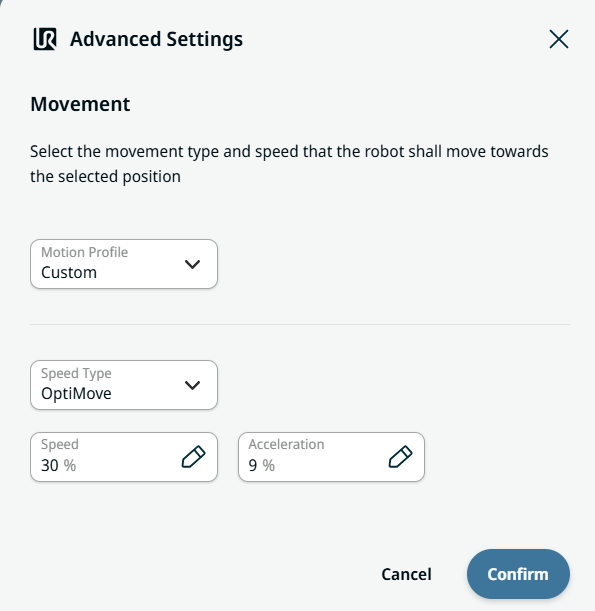
| Speciális beállítások |
A felhasználók a Speciális beállítások részben két lap és két mező segítségével hozhatnak létre mozgásprofilokat:
Mozgásprofil funkció lehetővé teszi, hogy a felhasználók előre meghatározott mozgásprofilokat állítsanak be a mozgási csomópontokban: Ízület mozgatása, Lineáris mozgás, Köríves mozgás, Folyamatmozgás és Irány. Egyéni Mozgásprofil lehetővé teszi, hogy a felhasználók mozgási adatokat határozzanak meg a mozgási csomópontban. A Sebességtípus mező alapértelmezett beállítása az OptiMove. Válassza az „ ” (Klasszikus) vagy az „ ” (Mozgás) beállítást, ha a sebességet és a gyorsulást fok/másodpercben vagy mm/másodpercben szeretné megadni. Az OptiMove beállítások az egyszerű használat és beállítás érdekében százalékban vannak megadva. A felhasználók a Sebesség lapon konfigurálhatják a sebesség százalékos arányát, amely a robot maximális sebességének százalékaként határozza meg a célsebességet. A felhasználók a Gyorsulás lapon konfigurálhatják a gyorsulás százalékos arányát, amely a robot maximális teljesítményének százalékaként határozza meg a célnyomaték határértékeit.
|