Sécurité à la maison
| Description |
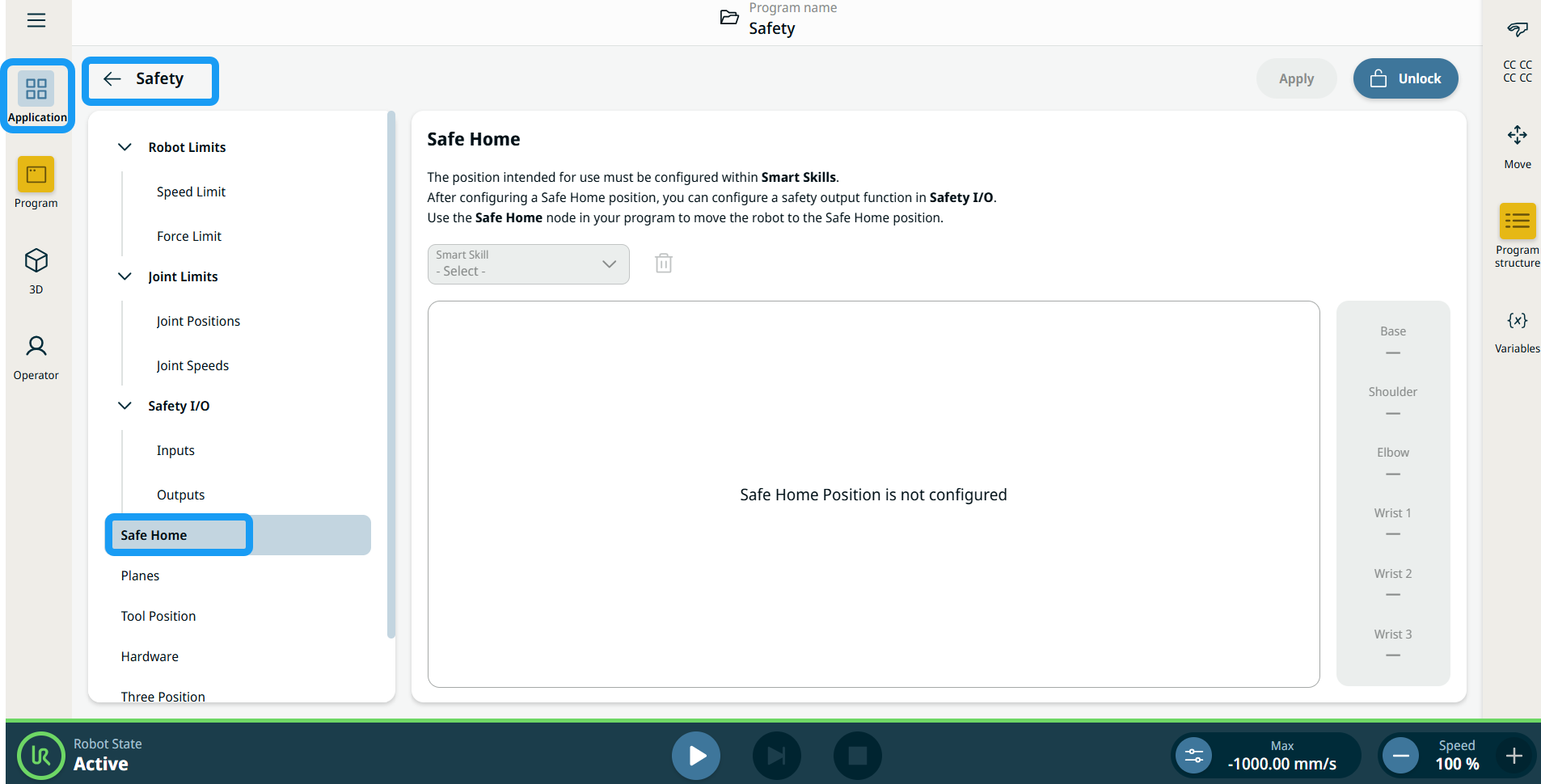
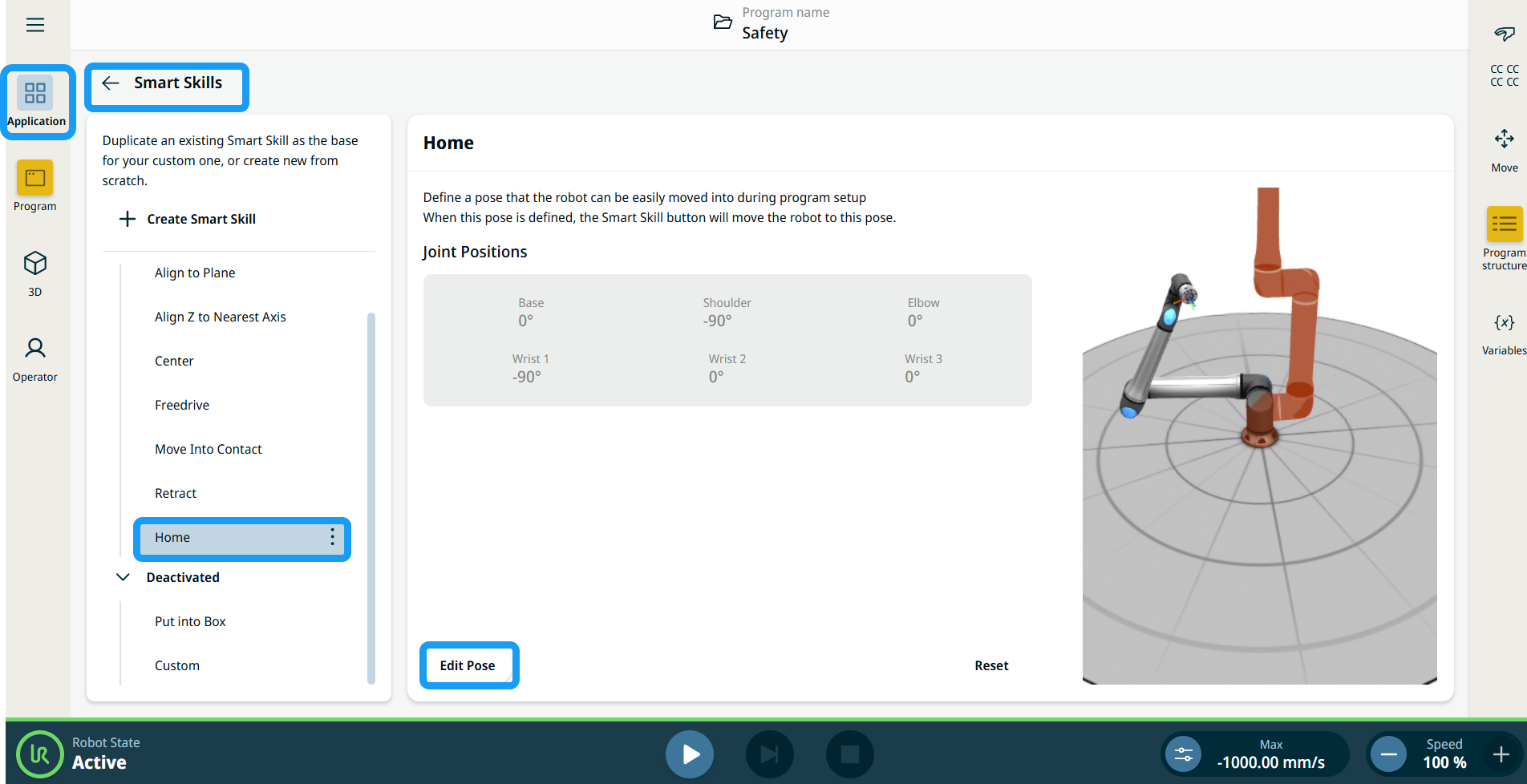
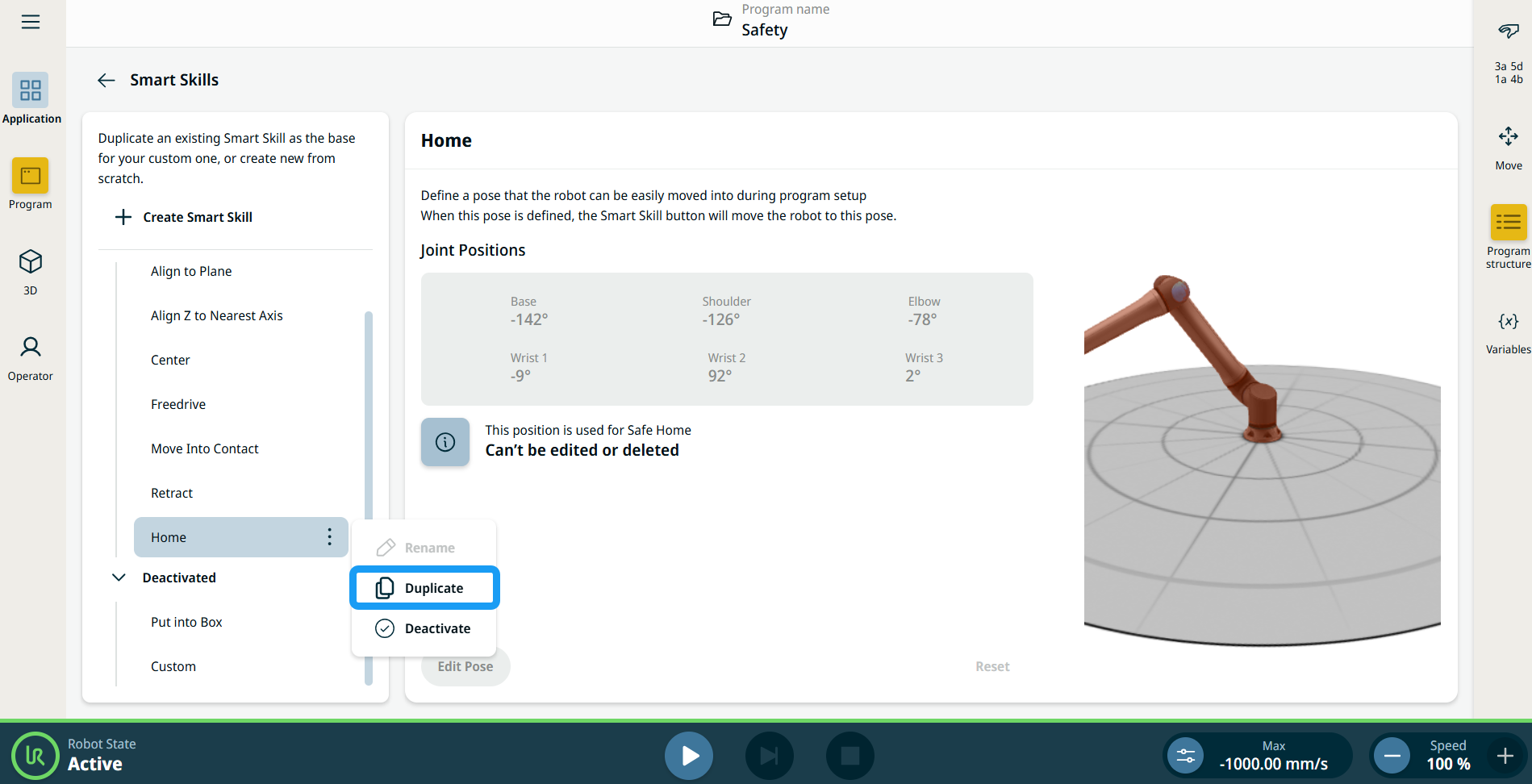
Position initiale de sécurité est une fonctionnalité PolyScope X qui permet aux utilisateurs de définir une sortie de sécurité qui s'active lorsque le robot atteint la position initiale de sécurité configurée. L'utilisateur choisit la position dans la liste déroulante des compétences intelligentes disponibles, qui peut être assignée comme référence pour la position initiale de sécurité.
|
|
Accéder à la position initiale de sécurité |
|
|
|
|
|
|
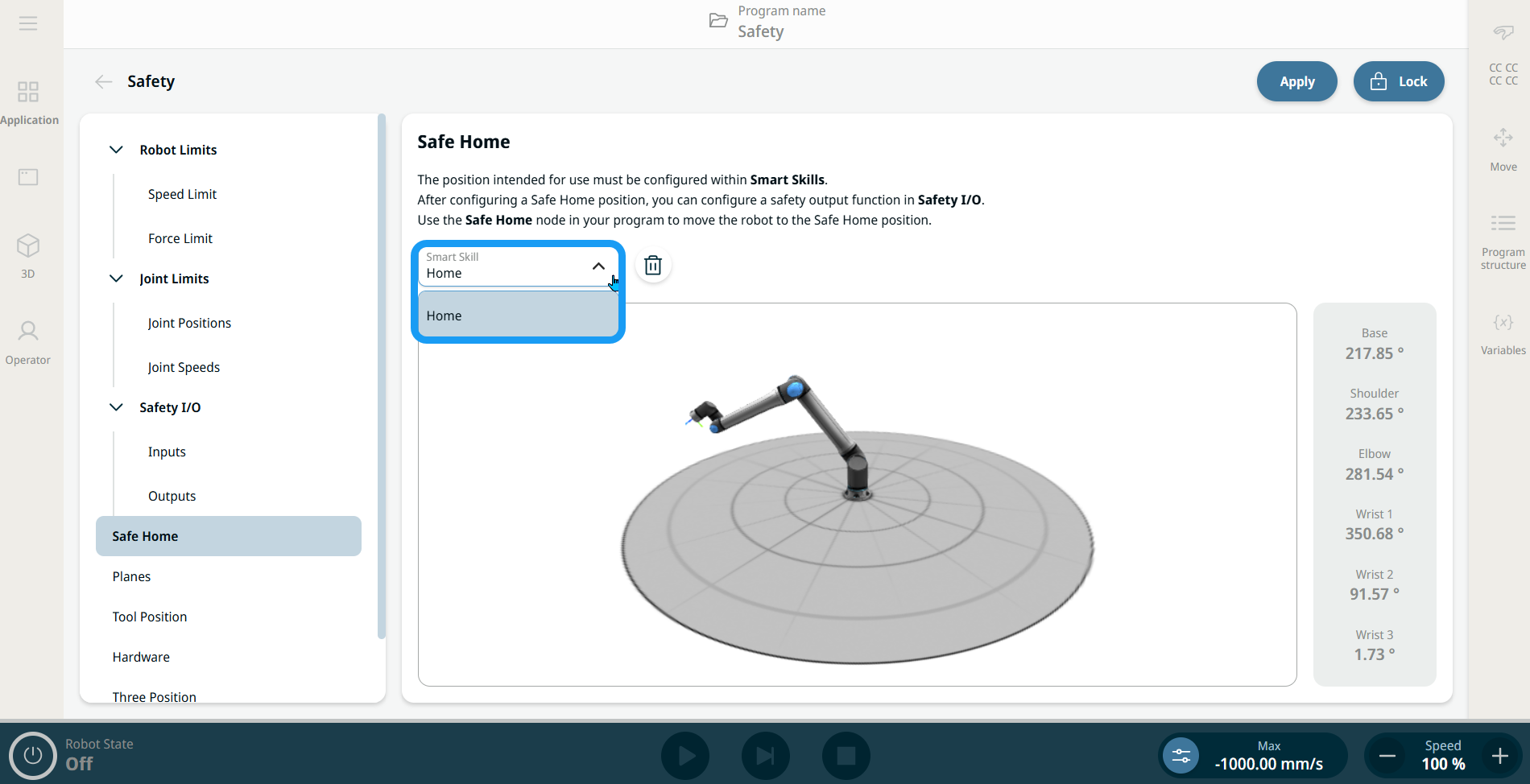
Si la position de la Smart skill est sélectionnée comme référence de position pour la position initiale de sécurité :
|
|
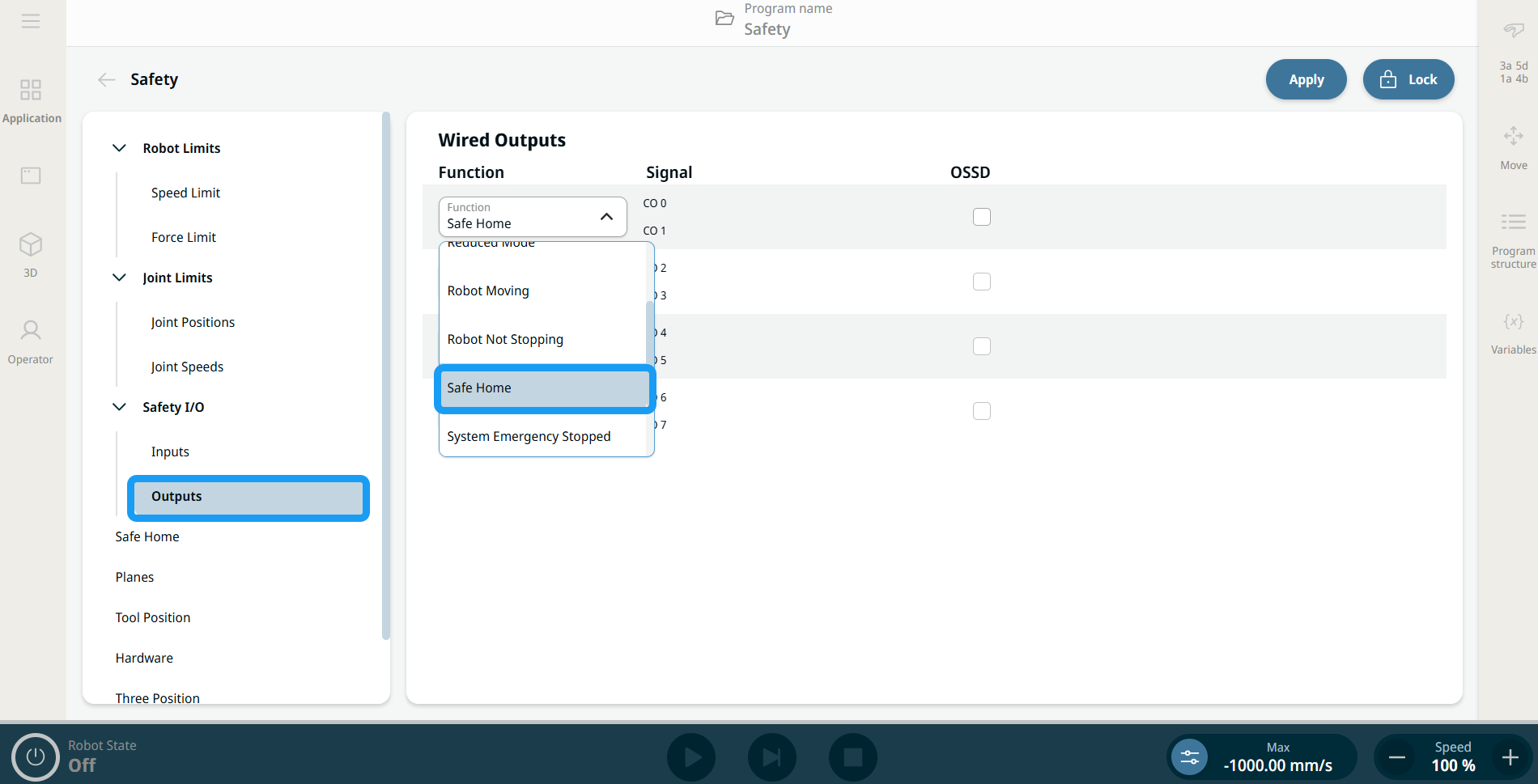
Fonction Position initiale de sécurité des sorties |
Si la position initiale est affectée à une smart skill de position dans Sécurité, la fonction de sortie de sécurité dans la liste déroulante contient Position initiale de sécurité en tant que nouvelle affectation de fonctions. Choisissez Position initiale de sécurité dans les champs Fonction dans Sorties des E/S de sécurité.
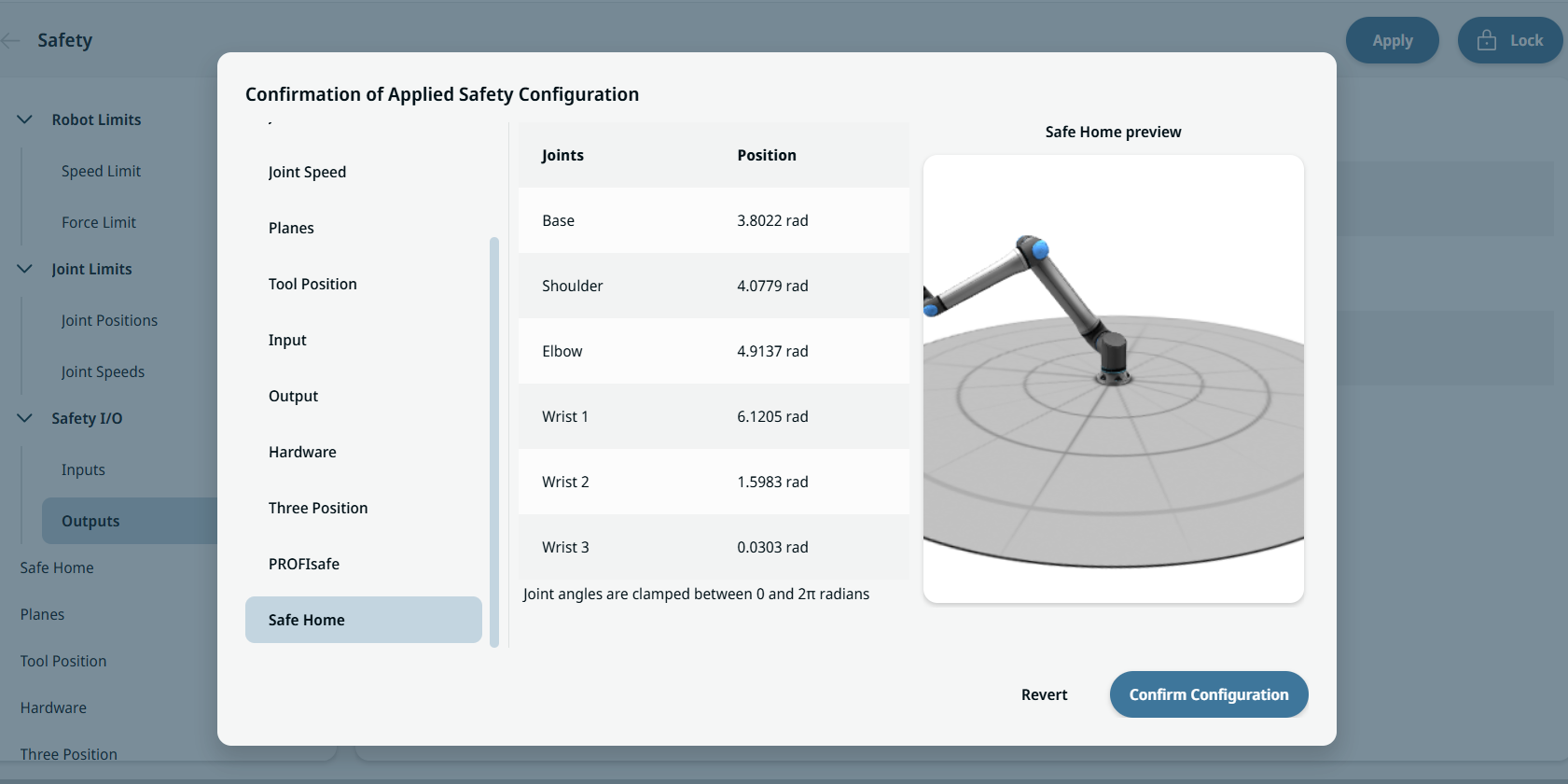
La Position initiale de sécurité peut être vue dans le tableau d'affectation de fonctions dans la boîte de dialogue Confirmation de la configuration de sécurité appliquée.
|
|
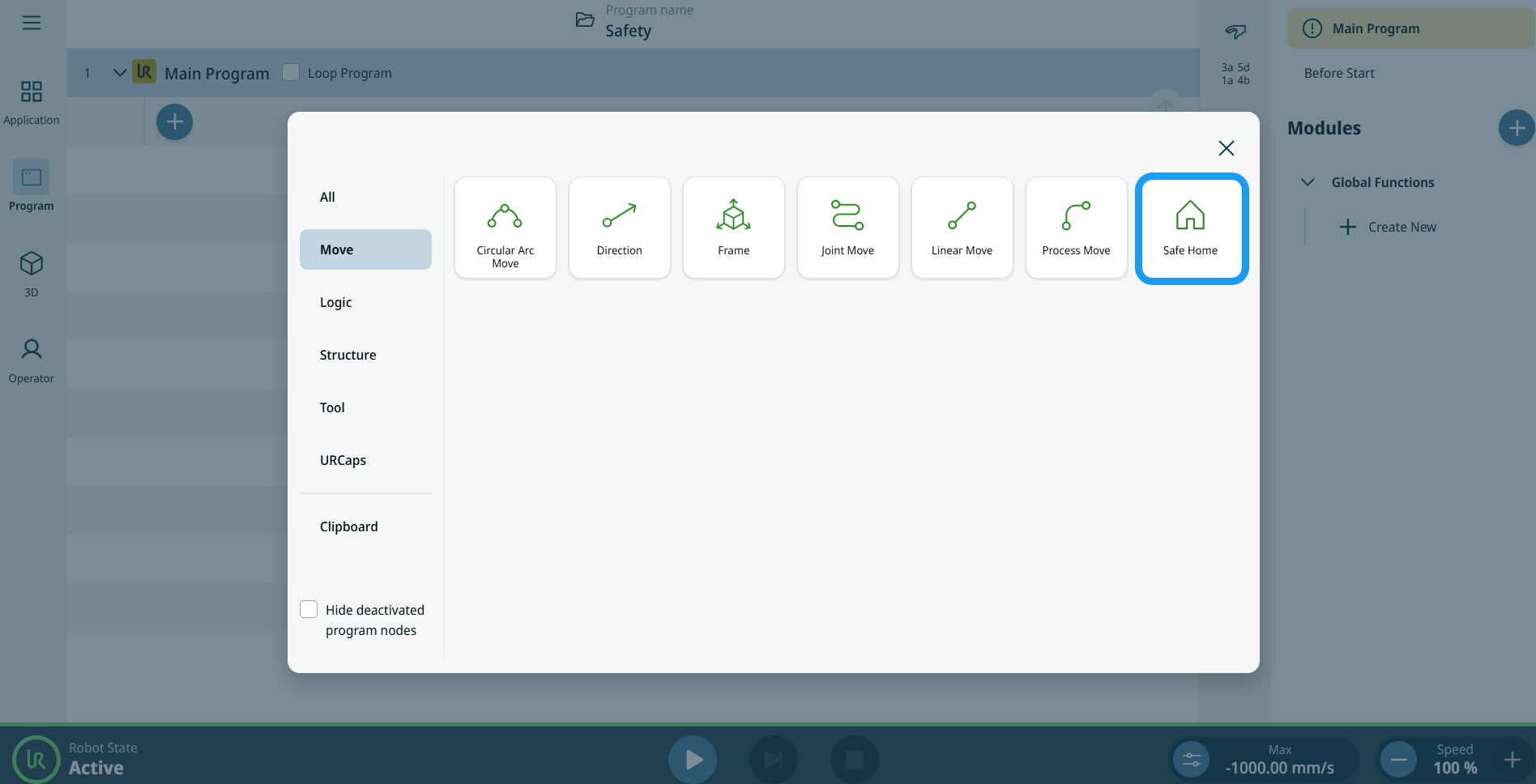
Position initiale de sécurité en tant que nœud de programme |
Le nœud du programme Position initiale de sécurité est situé dans la catégorie Nœuds de déplacement dans la catégorie Nœuds de commande. Ce nœud est utilisé pour commander au robot de se déplacer vers sa position initiale de sécurité prédéfinie, telle que configurée dans les réglages de l'application de sécurité pour une position initiale de sécurité.
L'ajout du nœud sans position initiale de sécurité configurée dans la sécurité marquera le nœud en jaune.

Le nœud de commande position initiale de sécurité a des options de profils de mouvement et d'autres réglages avancés lorsque l'icône d'ellipse
|
 est cliquée.
est cliquée.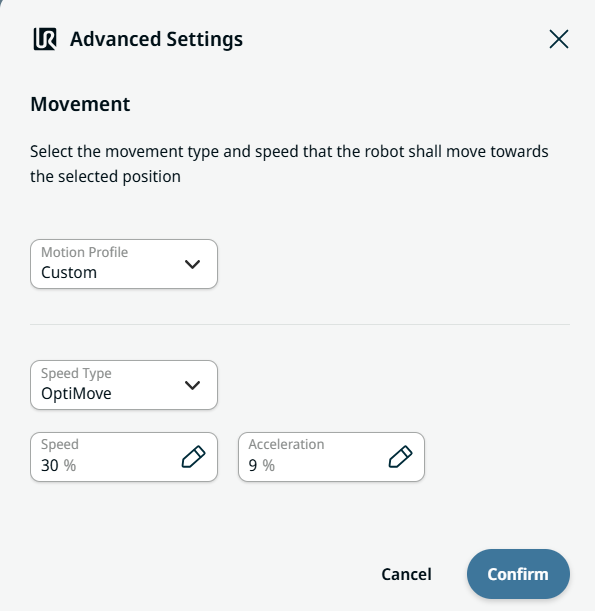
| Réglages avancés |
Les utilisateurs peuvent créer des profils de mouvement dans les réglages avancés en utilisant les deux onglets et deux champs :
Profil de mouvement est une fonctionnalité permettant aux utilisateurs de définir des profils de mouvement prédéfinis dans les nœuds de mouvement : Déplacement de l'articulation, Déplacement linéaire, Déplacement arc circulaire, déplacement de processus, et direction. Profil de mouvement personnalisé permet aux utilisateurs de définir des données de mouvement dans le nœud de déplacement. Dans le champ Type de vitesse, OptiMove est l'option par défaut. Choisissez le mouvement « Classic » si vous souhaitez saisir la vitesse et l'accélération en degrés par seconde ou en mm par seconde. Les réglages OptiMove sont spécifiés en pourcentage pour simplifier l'utilisation et la configuration. Les utilisateurs peuvent configurer le pourcentage de vitesse préférée dans l'onglet Vitesse, qui définit la vitesse de déplacement cible en pourcentage de la capacité de vitesse maximale du robot. Les utilisateurs peuvent configurer le pourcentage d'accélération préférée dans l'onglet Accélération, qui fixe les limites du couple cible pendant l'accélération et la décélération en pourcentage de la puissance maximale du robot.
|