Plano de seguridad utilizando un marco
| Descripción |
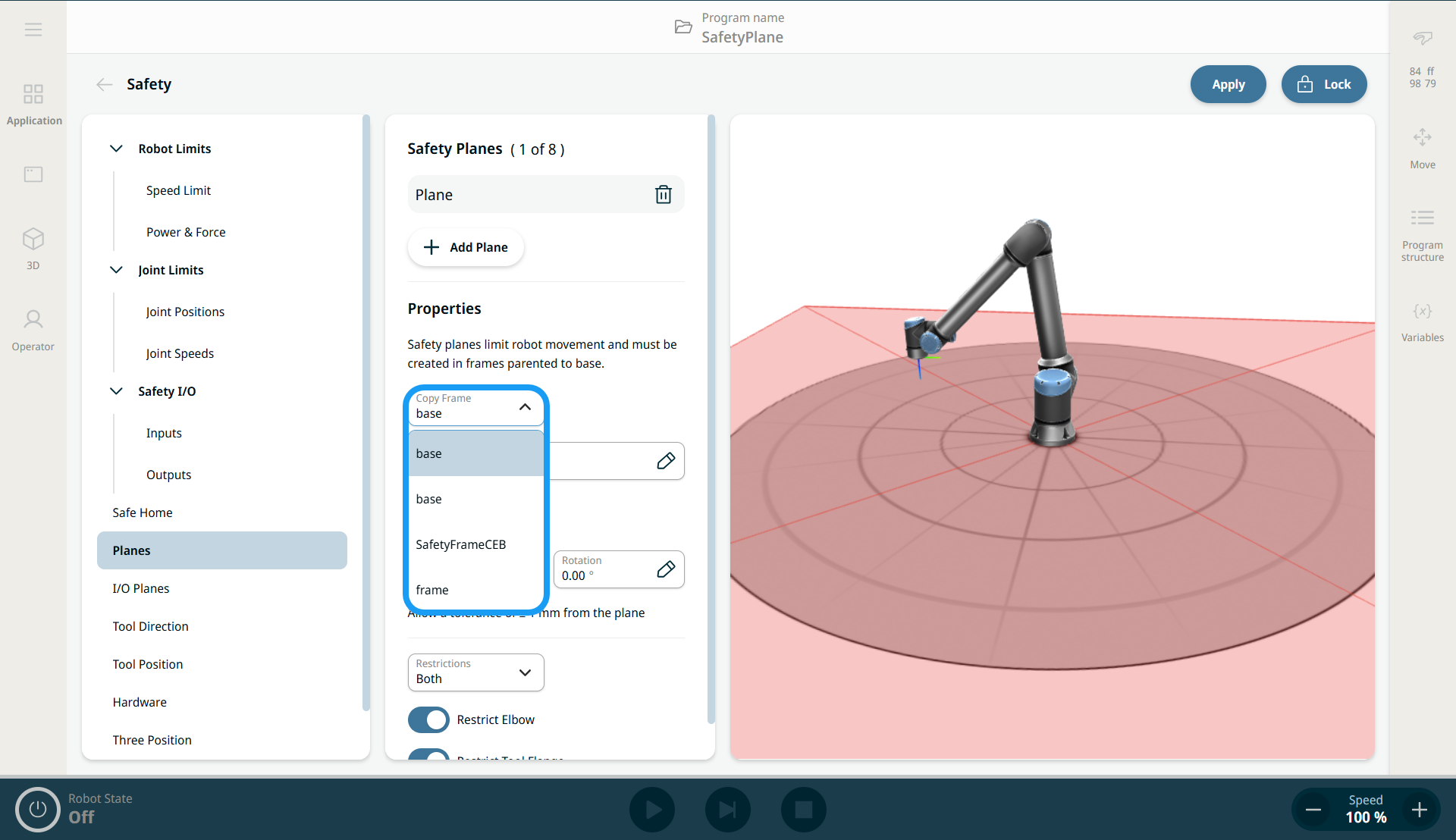
Puede utilizar un marco existente para definir un plano de seguridad. Esto ofrece una forma más intuitiva de especificar los parámetros del plano a partir de una posición y rotación predefinidas (X, Y, Z, RX, RY, RZ). Seleccione el marco en el Copiar marco menú desplegable.
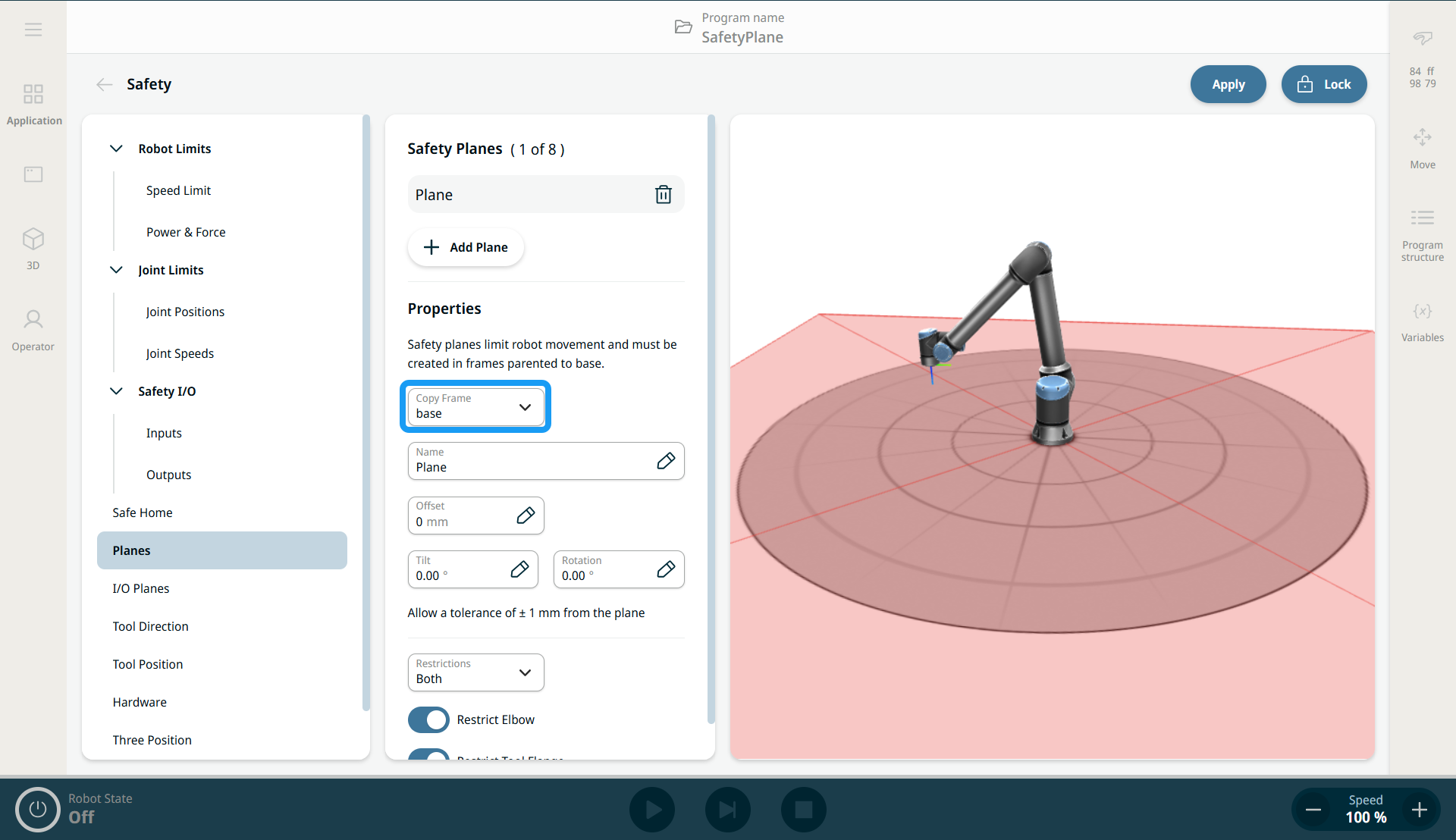
El menú desplegable Copiar marco se encuentra en los parámetros de la definición de un plano de seguridad en la pantalla Planos. Esta lista incluye los marcos definidos en la pantalla Marcos. Cuando se selecciona un marco, se utiliza como definición del plano de seguridad. Si se especifican los parámetros de desplazamiento, inclinación y rotación, estos se aplican al marco seleccionado (véase «Configuración de un plano de seguridad»). El plano de seguridad resultante combina todos los parámetros.
|
|
|
Consulte la sección «Marcos» en el Manual de software. |
|
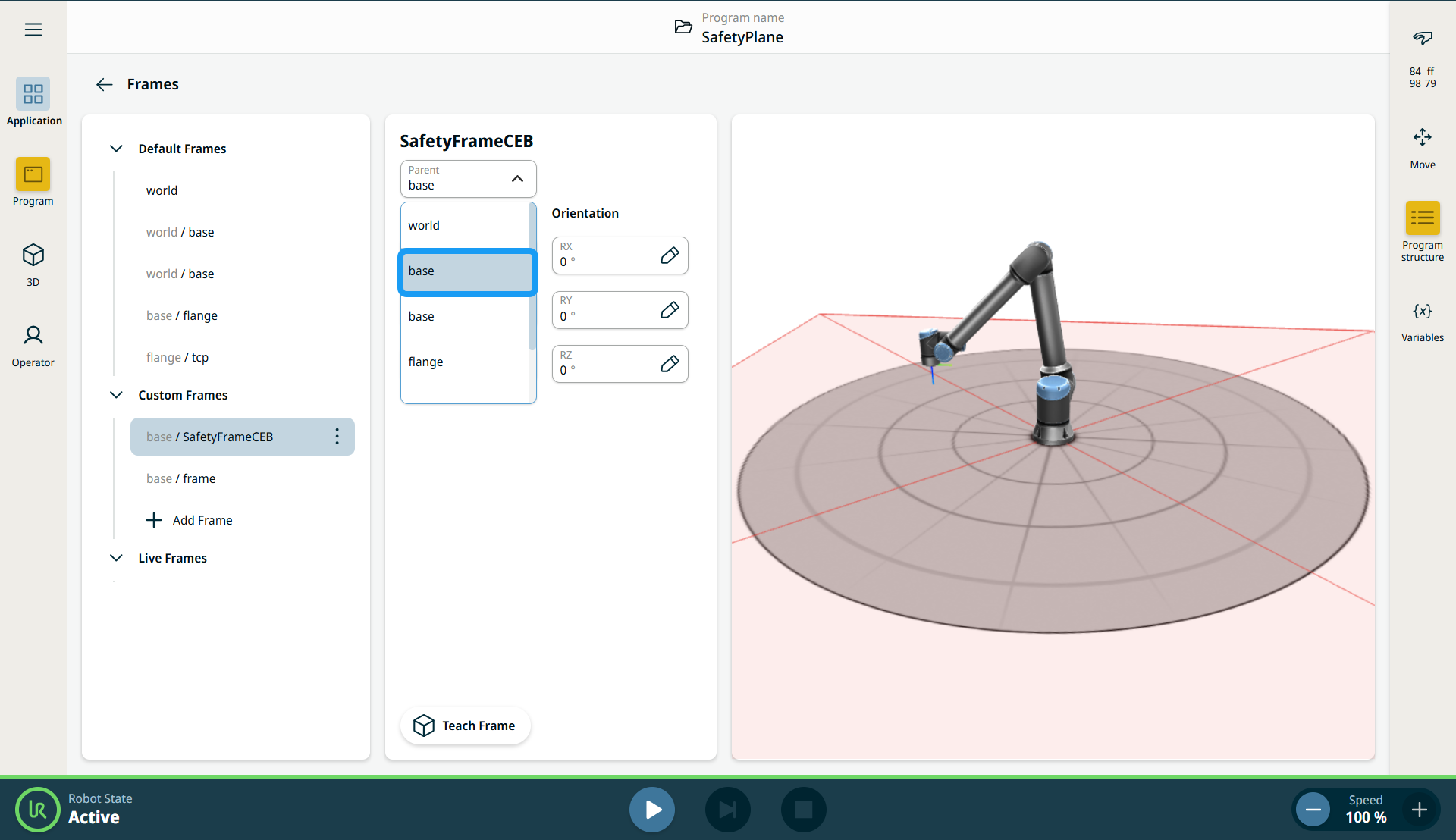
Crear un marco |
|
|
|
Seleccionar marco de referencia en el plano de seguridad |
|
|
|
|
|
|
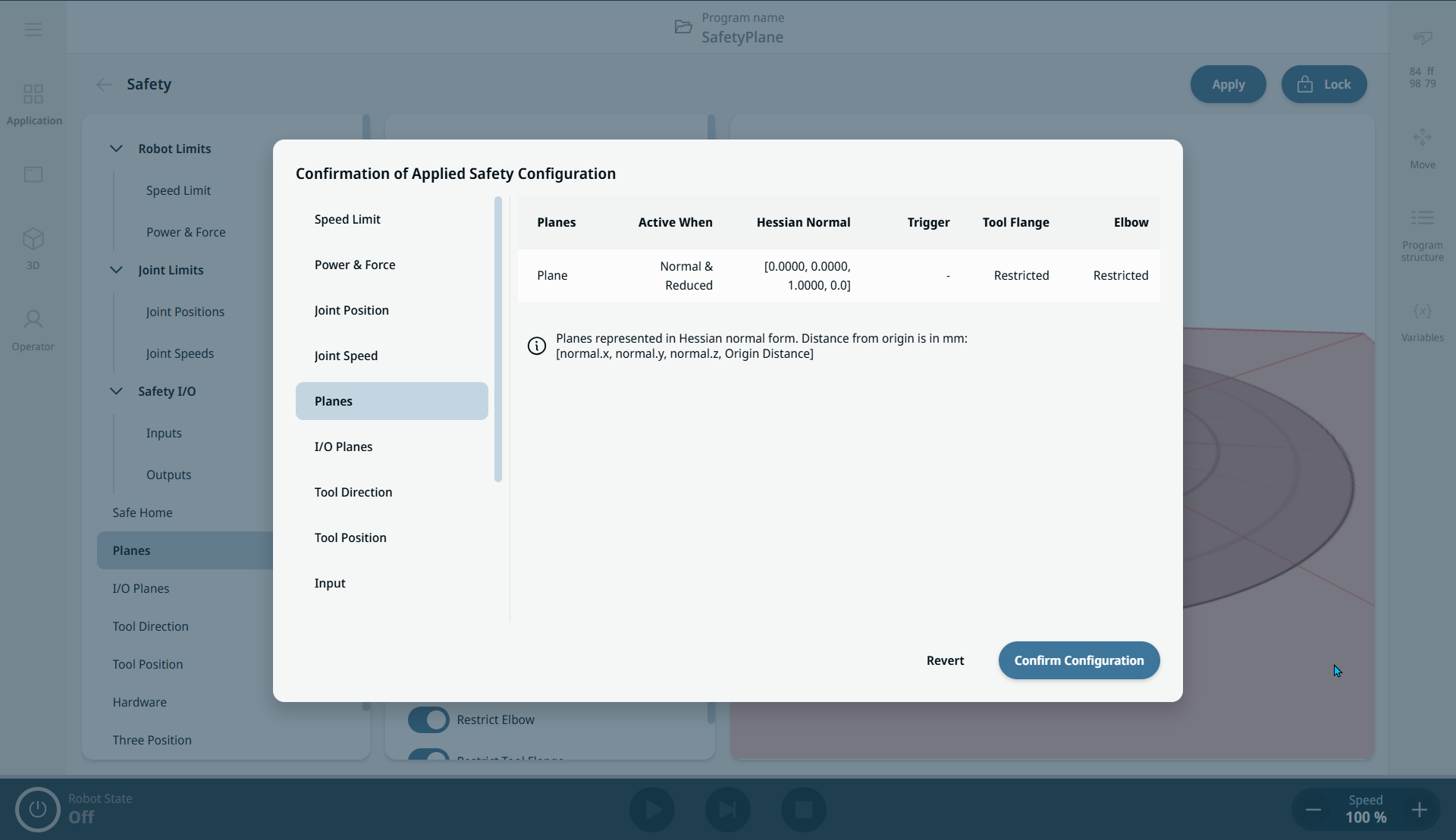
Es posible que el marco utilizado para un plano de seguridad esté invertido con respecto a lo que cabría esperar. Si el robot se encuentra en el lado del plano que infringe la norma, añada una inclinación de 180 grados. Para conocer las restricciones relativas a las configuraciones de planos, la restricción del codo y la restricción de la brida de la herramienta, consulte «Planos de seguridad».
|