Hogar seguro
| Descripción |
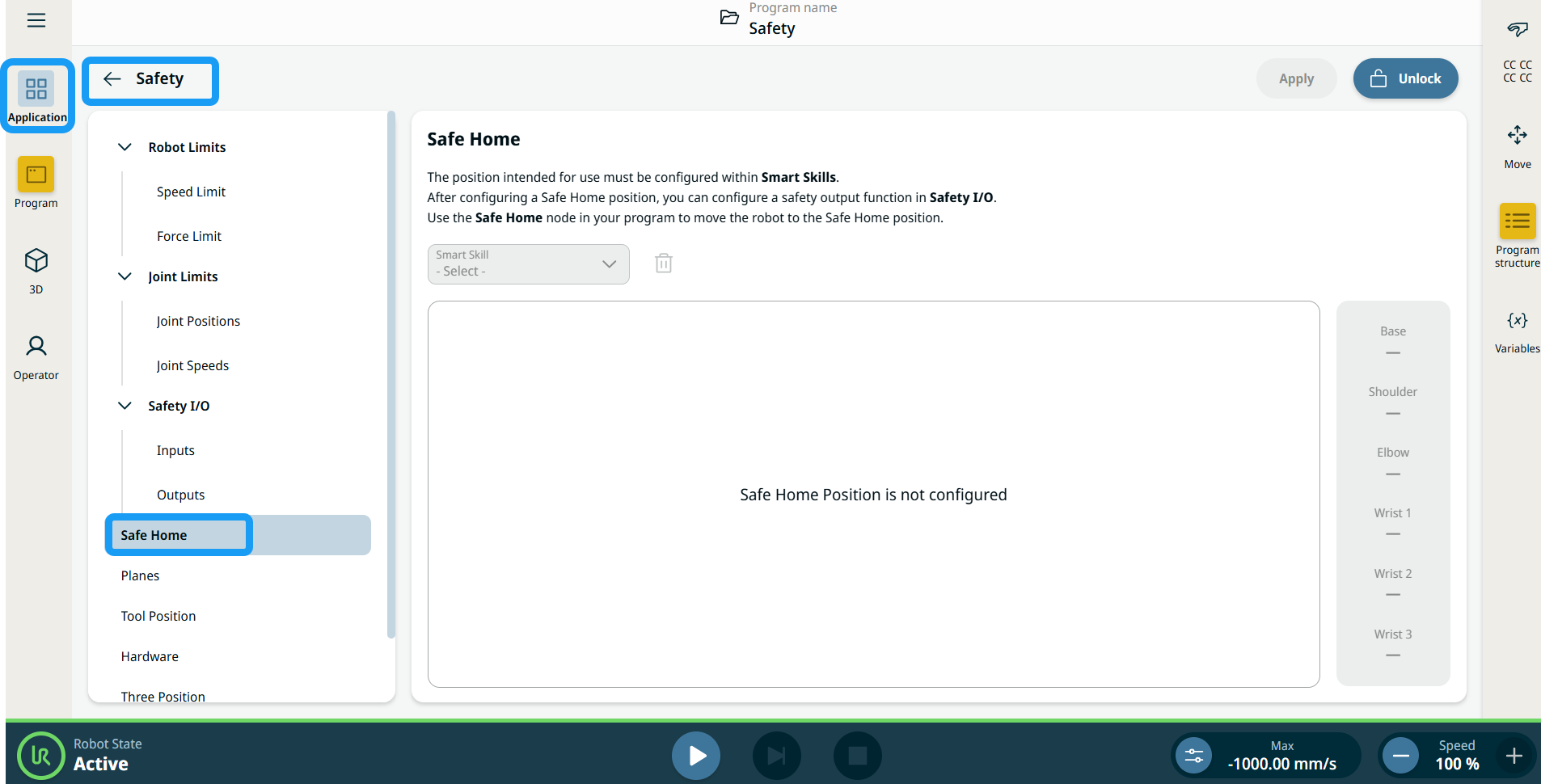
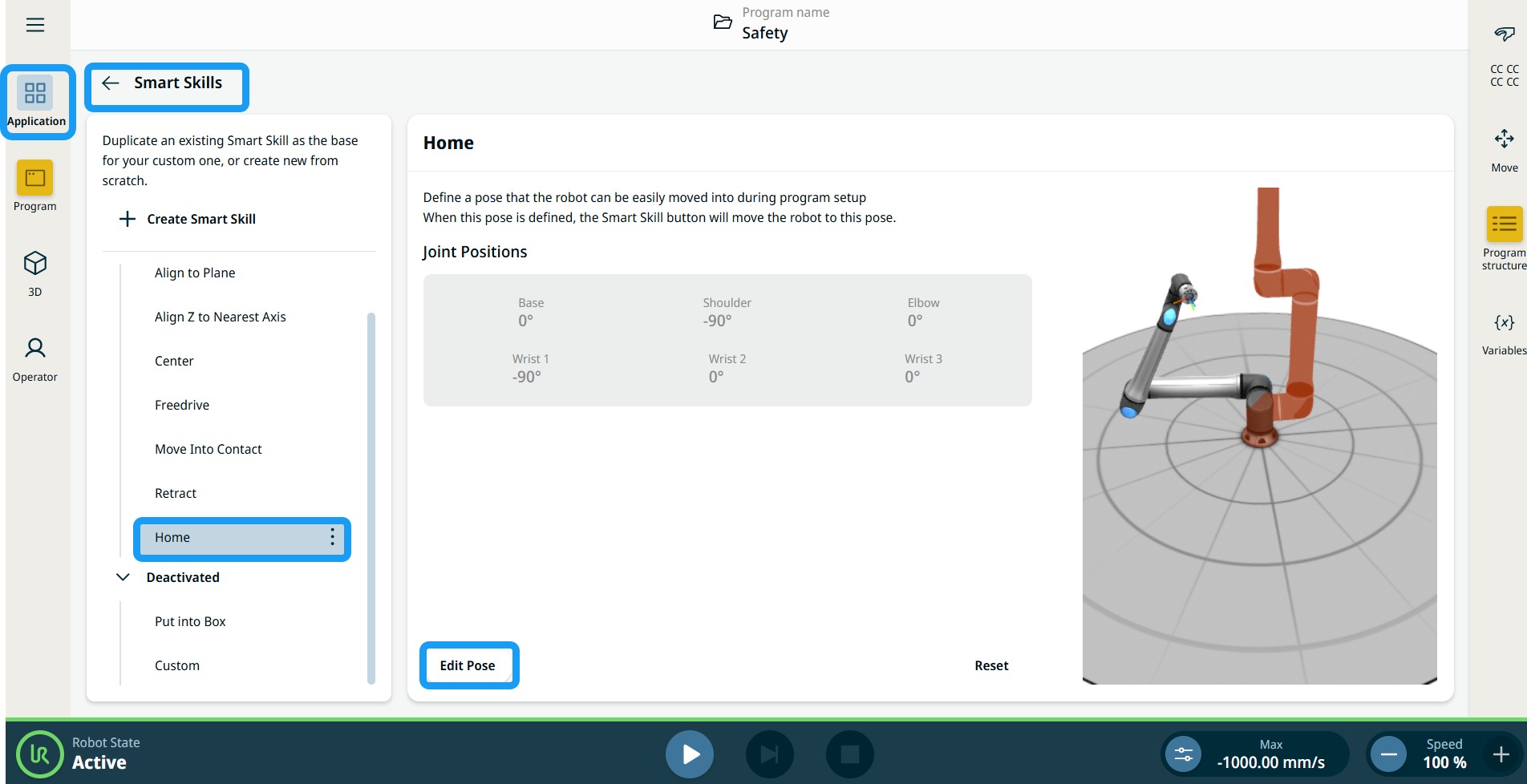
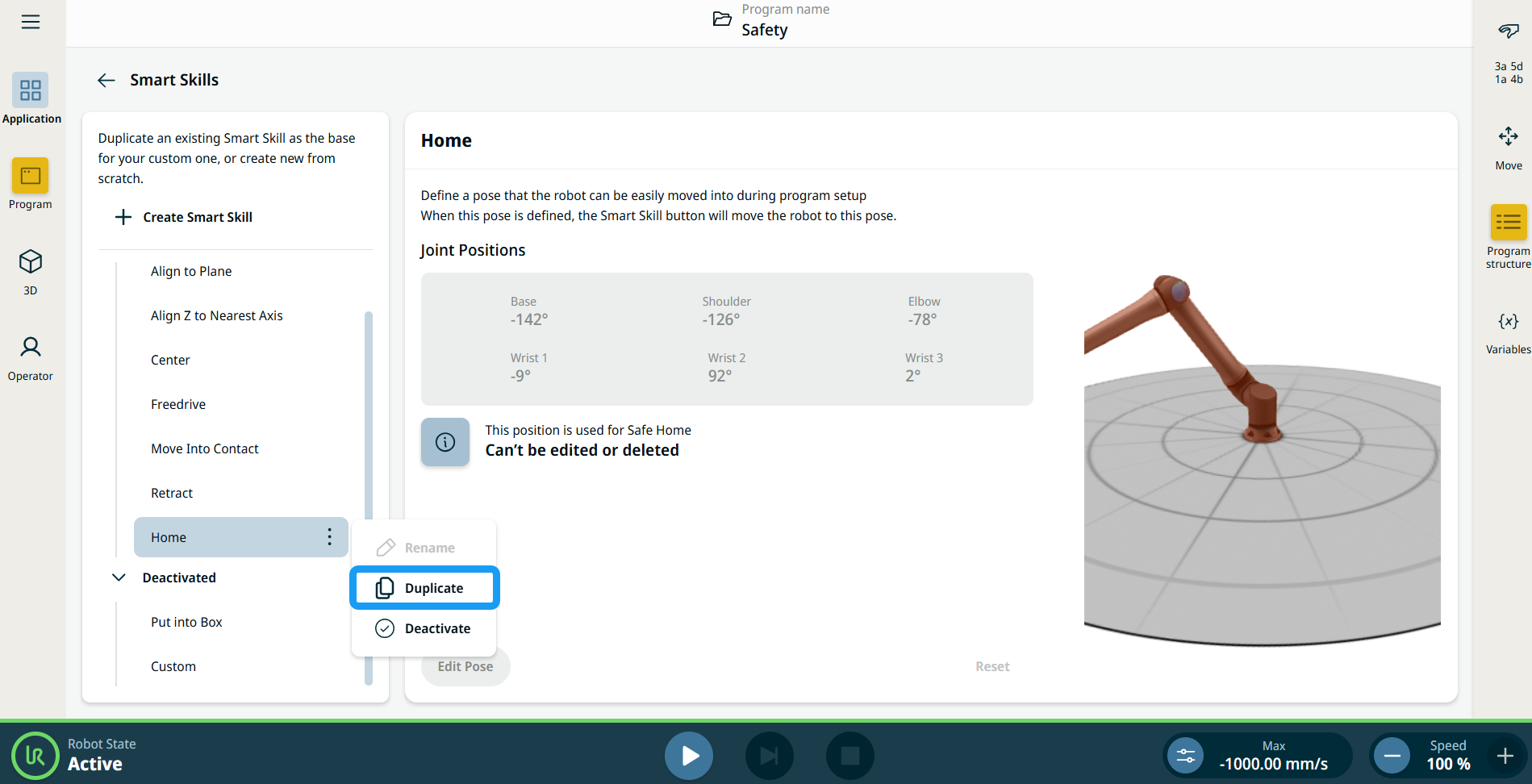
Origen seguro es una función de PolyScope X que permite a los usuarios definir una salida relacionada con la seguridad que se activa cuando el robot alcanza la posición de origen seguro configurada. El usuario elige Origen en el menú desplegable de las posiciones de capacidades inteligentes disponibles, que puede asignarse como referencia para la posición de Origen seguro.
|
|
Acceso a Origen seguro |
|
|
|
|
|
|
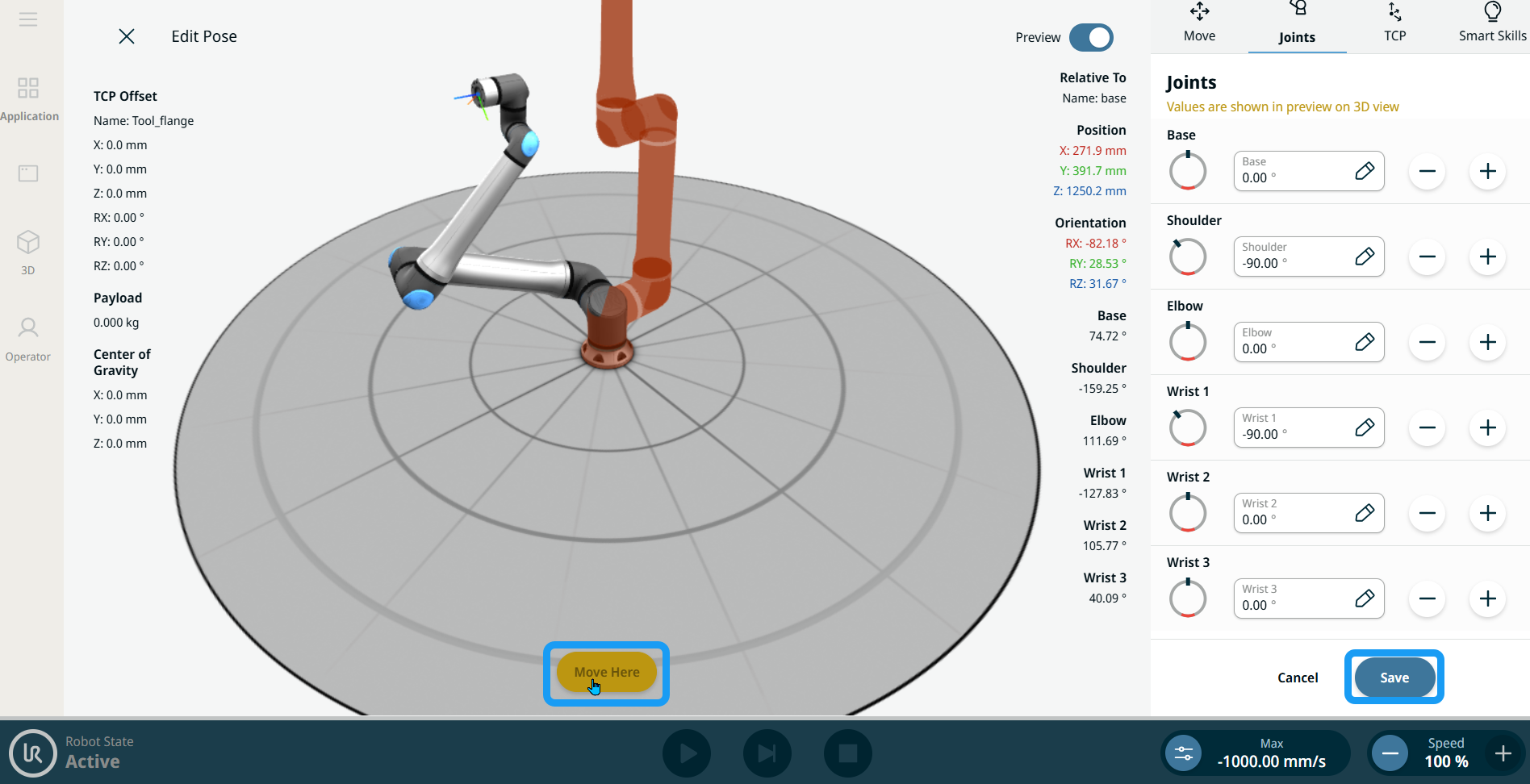
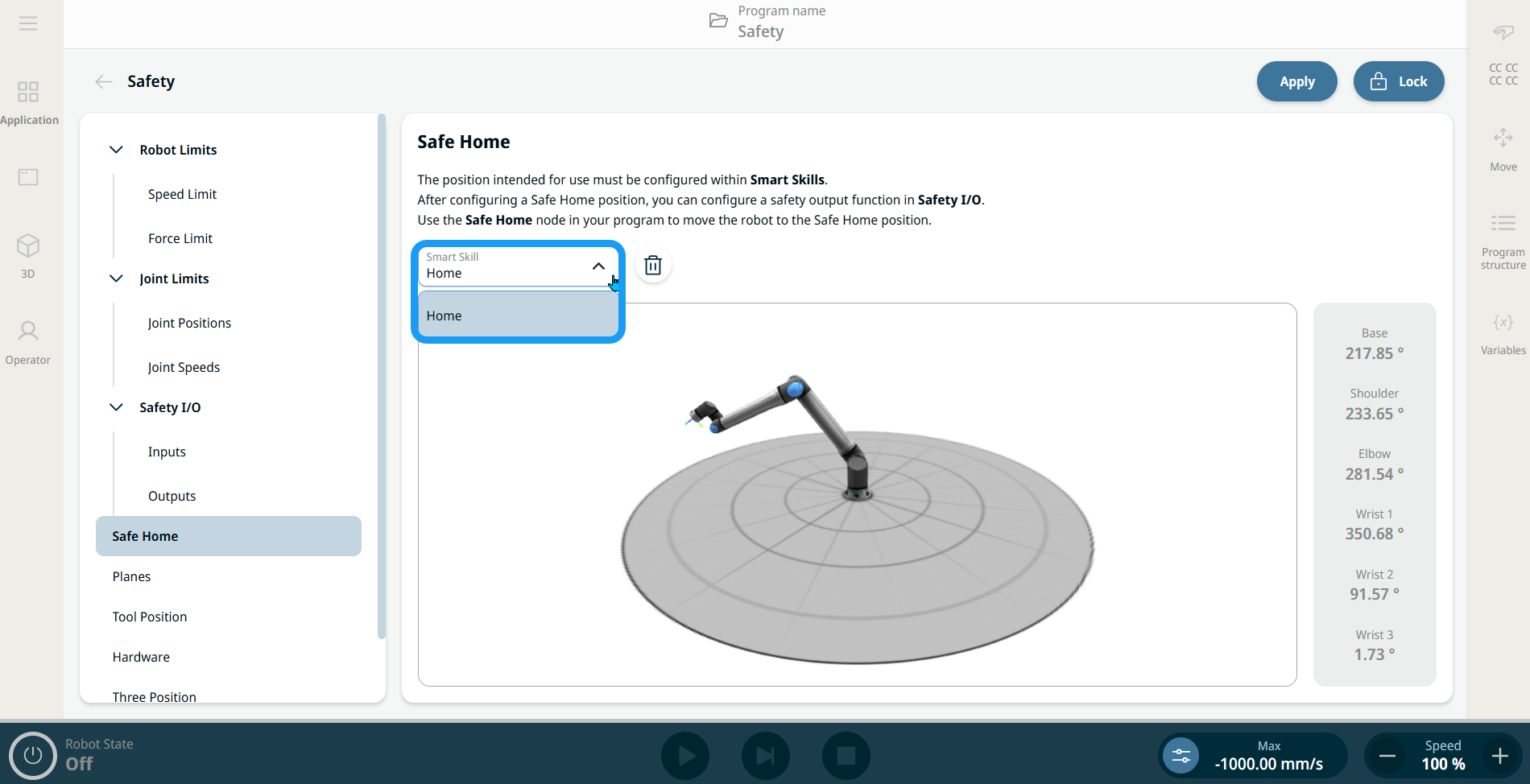
Si se selecciona la capacidad inteligente de la posición como referencia de posición para el Origen seguro:
|
|
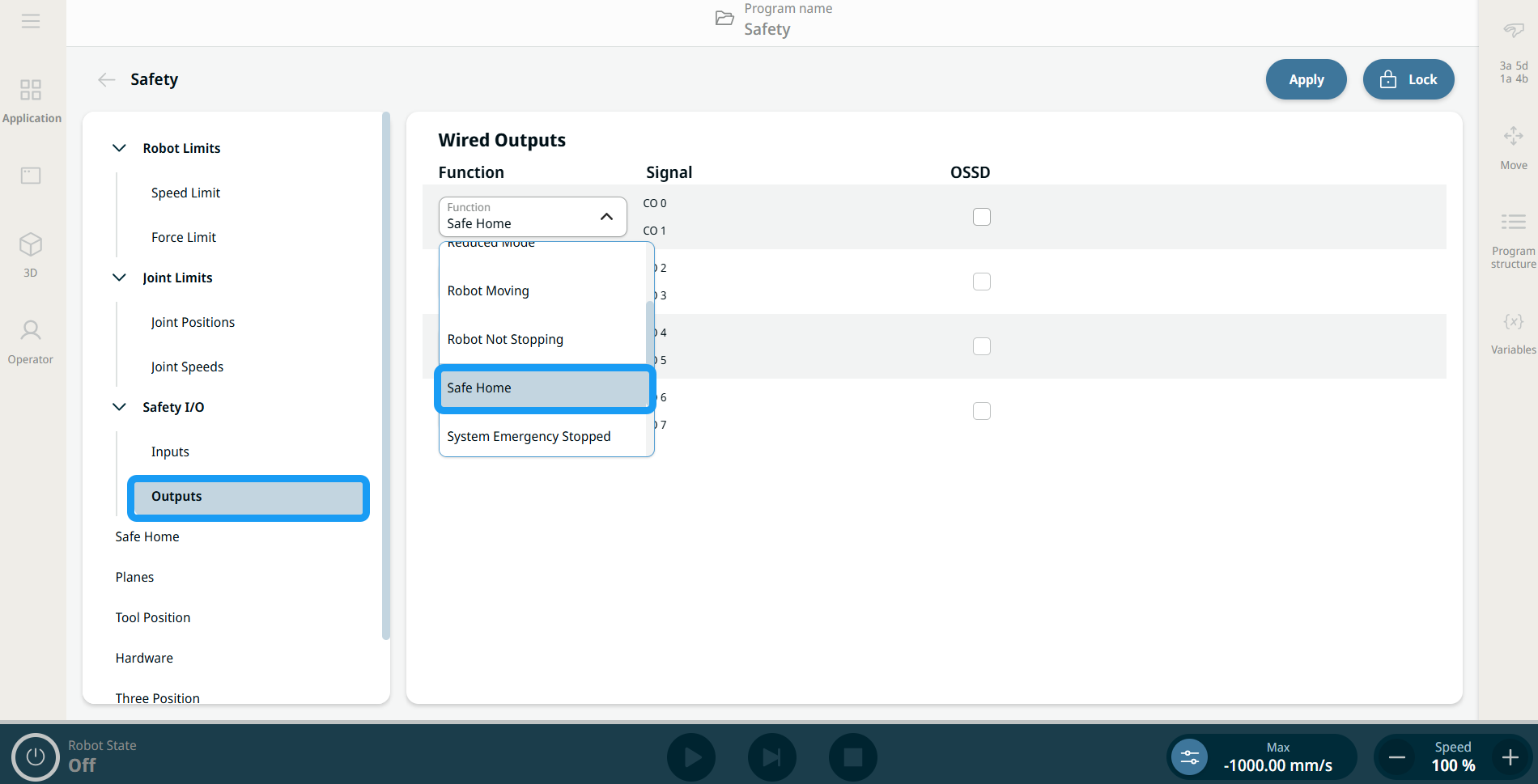
Función Origen seguro en las salidas |
Si la posición Origen se asigna a una capacidad inteligente de posición en Seguridad, el menú desplegable de la función de salida de seguridad incluirá Origen seguro como una nueva asignación de función. Elija Origen seguro en los campos de Función en Salidas de E/S de seguridad.
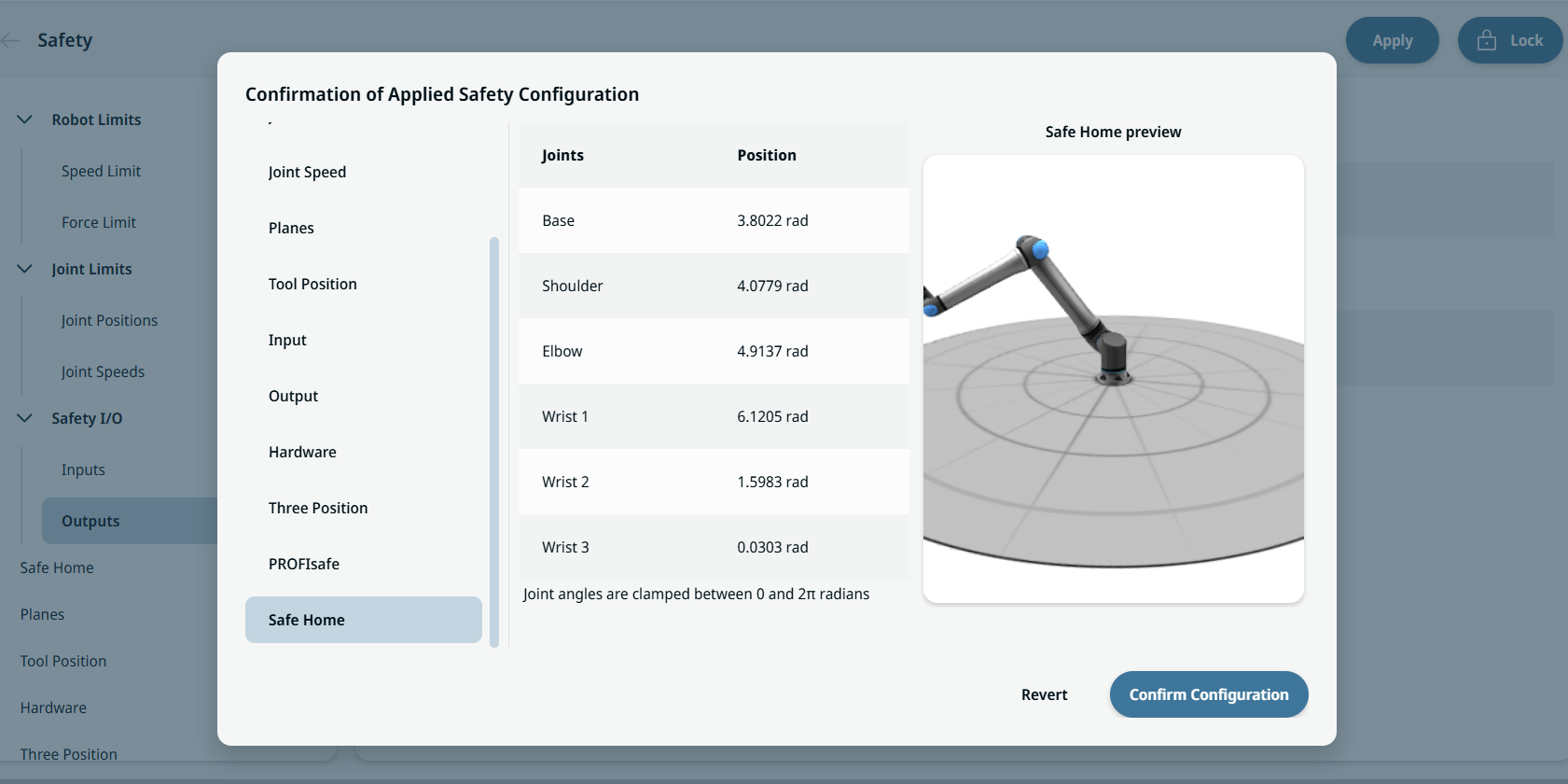
Se puede ver Origen seguro en la tabla de asignación de funciones en el diálogo de información Confirmación de la configuración de seguridad aplicada.
|
|
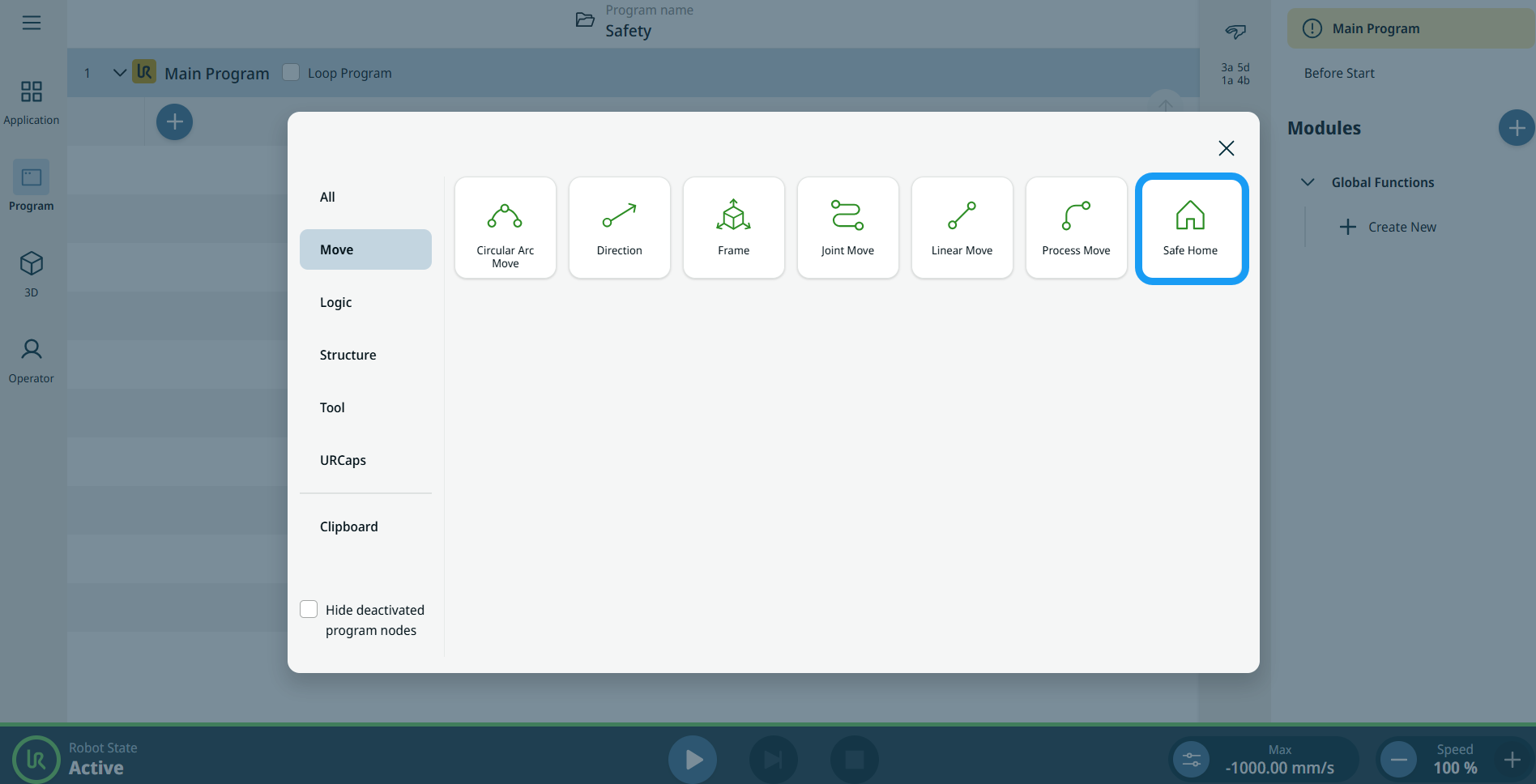
Origen seguro como un nodo de programa |
El nodo de programa Origen seguro se encuentra bajo la categoría Mover nodos dentro de Nodos de comando. Este nodo se utiliza para ordenar al robot que se mueva a su posición predefinida de origen seguro, como se ha configurado en los ajustes de la aplicación de seguridad para origen seguro.
Añadir el nodo sin una posición de origen seguro configurada en la aplicación de seguridad marcará el nodo de color amarillo.

El nodo de comandos de Origen seguro tiene opciones de perfiles de movimiento y otros ajustes avanzados cuando se pulsa el icono de elipsis
|
 .
.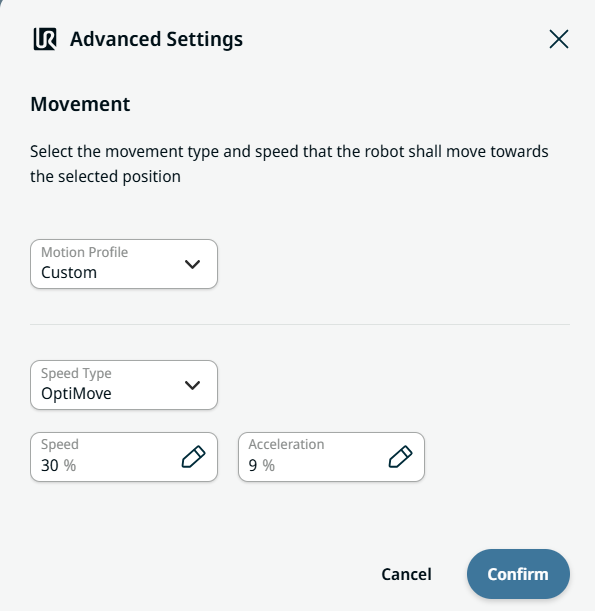
| Ajustes avanzados |
Los usuarios pueden crear perfiles de movimiento en los Ajustes avanzados usando dos pestañas y dos campos:
Perfil de movimiento es una función que permite a los usuarios establecer perfiles de movimiento predefinidos en los nodos de movimiento: Movimiento de articulaciones, movimiento lineal, movimiento de arco circular, movimiento del proceso y dirección. El perfil de movimientopersonalizado permite a los usuarios definir los datos de movimiento en el nodo de movimiento. En el campo Tipo de velocidad, OptiMove es la opción predeterminada. Seleccione el movimiento « » o « » si desea introducir la velocidad y la aceleración en grados por segundo o en milímetros por segundo. Los ajustes de OptiMove se especifican en porcentaje para simplificar el uso y la configuración. Los usuarios pueden configurar el porcentaje de velocidad preferida en la pestaña Velocidad, que establece la velocidad de viaje objetivo como un porcentaje de la capacidad de velocidad máxima del robot. Los usuarios pueden configurar el porcentaje de aceleración preferida en la pestaña Aceleración, que establece los límites de par de torsión objetivo durante la aceleración y la desaceleración como un porcentaje de la potencia máxima del robot.
|