Linear Move
| Descripción |
The Linear Move command node supports Motions Profiles as Joint Move, but it creates a movement that is a direct line from point A and point B. It moves the Tool Center Point (TCP) linearly between waypoints. Esto significa que cada articulación realiza un movimiento más complicado para mantener la herramienta en una trayectoria en línea recta.
|
|
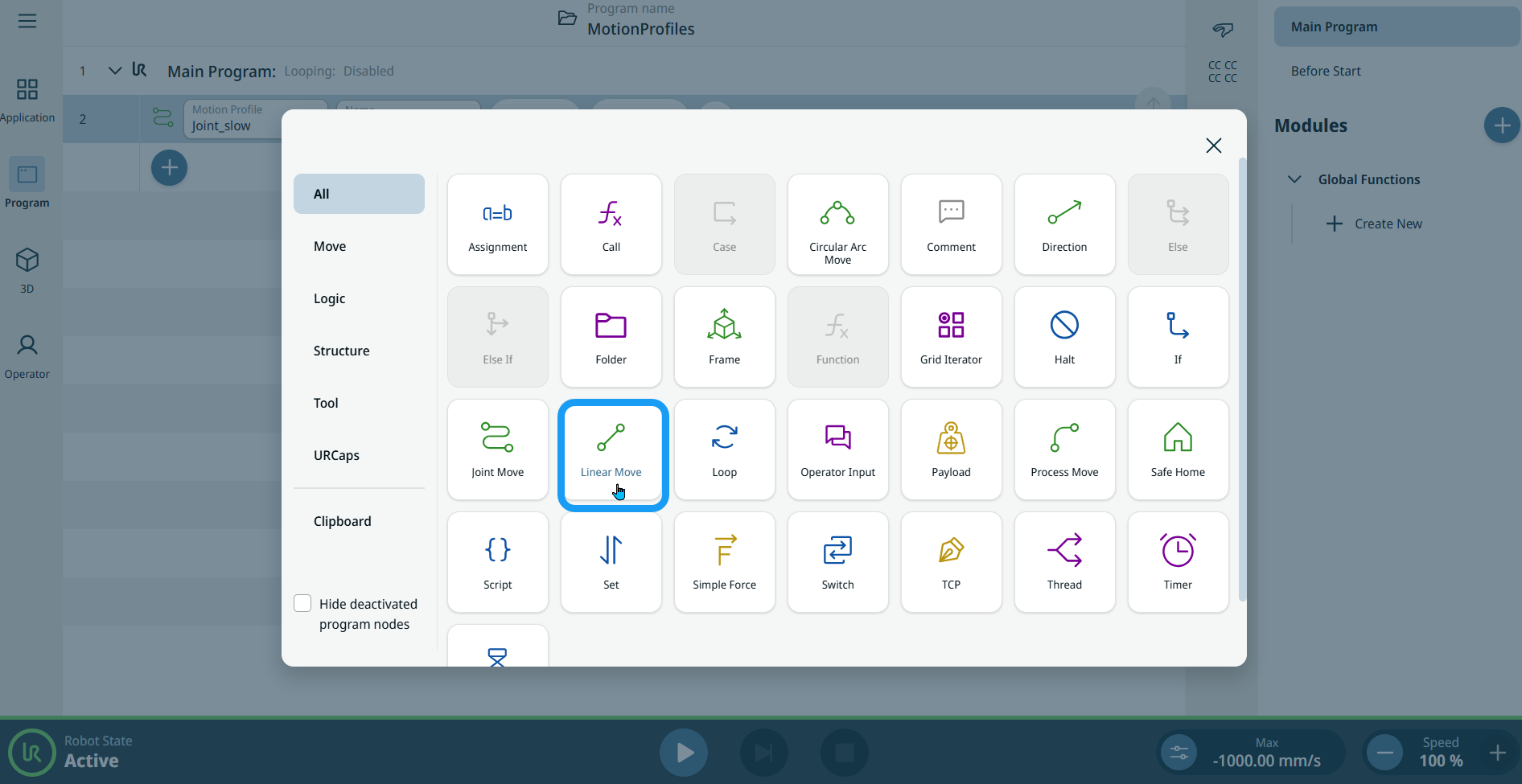
To access Linear Move command |
|
|
|
|
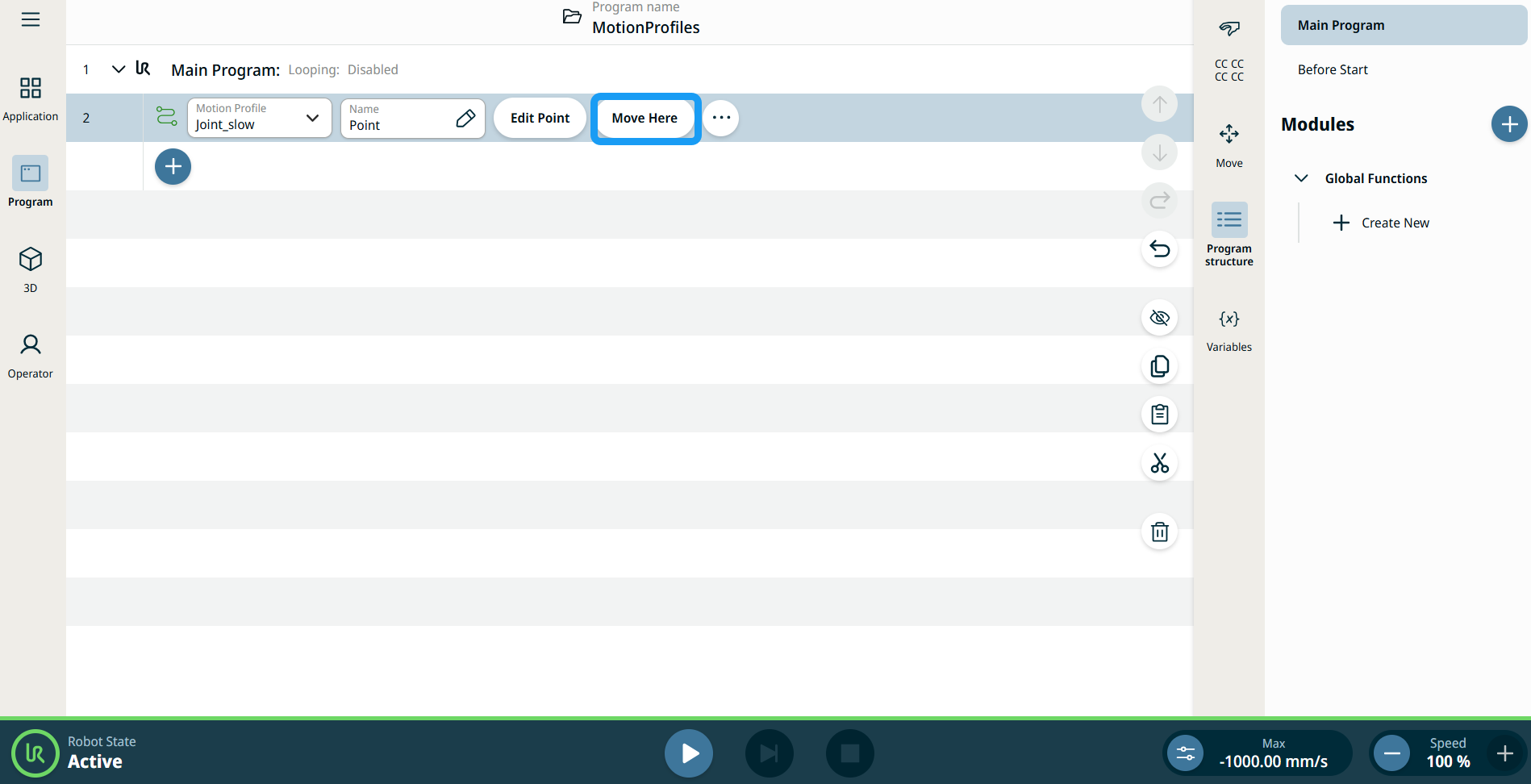
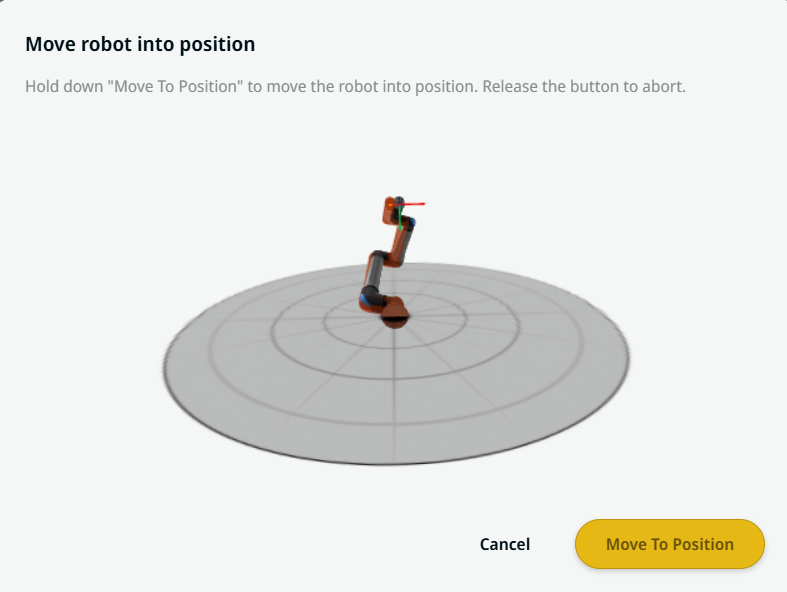
| Uso del botón Mover aquí |
El botón Mover aquí se puede ver en los comandos Linear Move y Joint Move. Esta función le permite desplazarse a la posición de un punto de paso directamente desde el árbol de programa. Al pulsar el botón Mover aquí se abre el diálogo Poner robot en posición. El botón se puede ver cuando se ha enseñado el punto de paso y solo se habilita cuando el estado del robot está en modo Normal o Reducido.
|
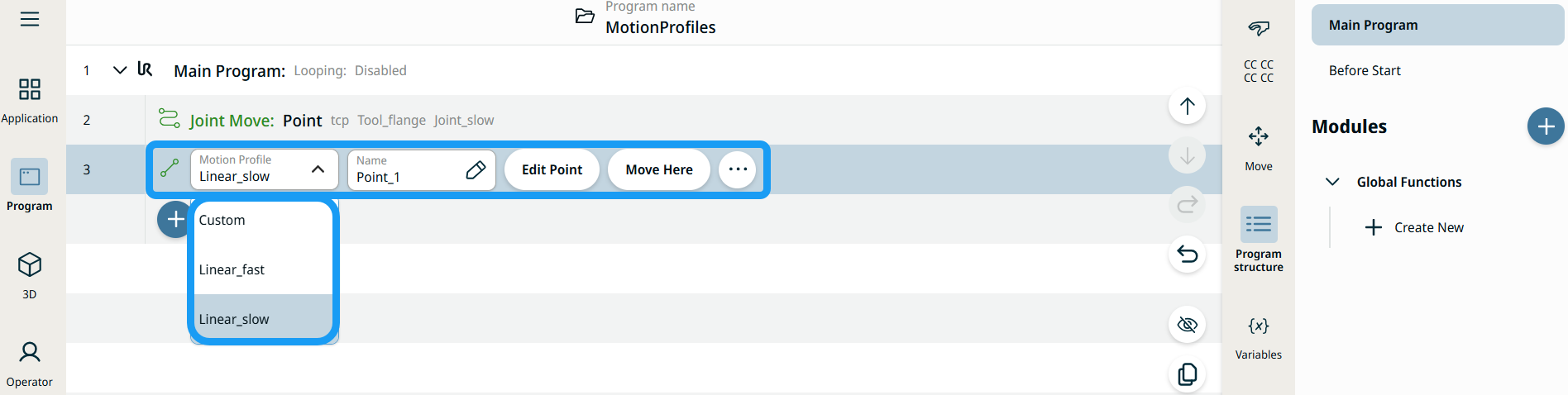
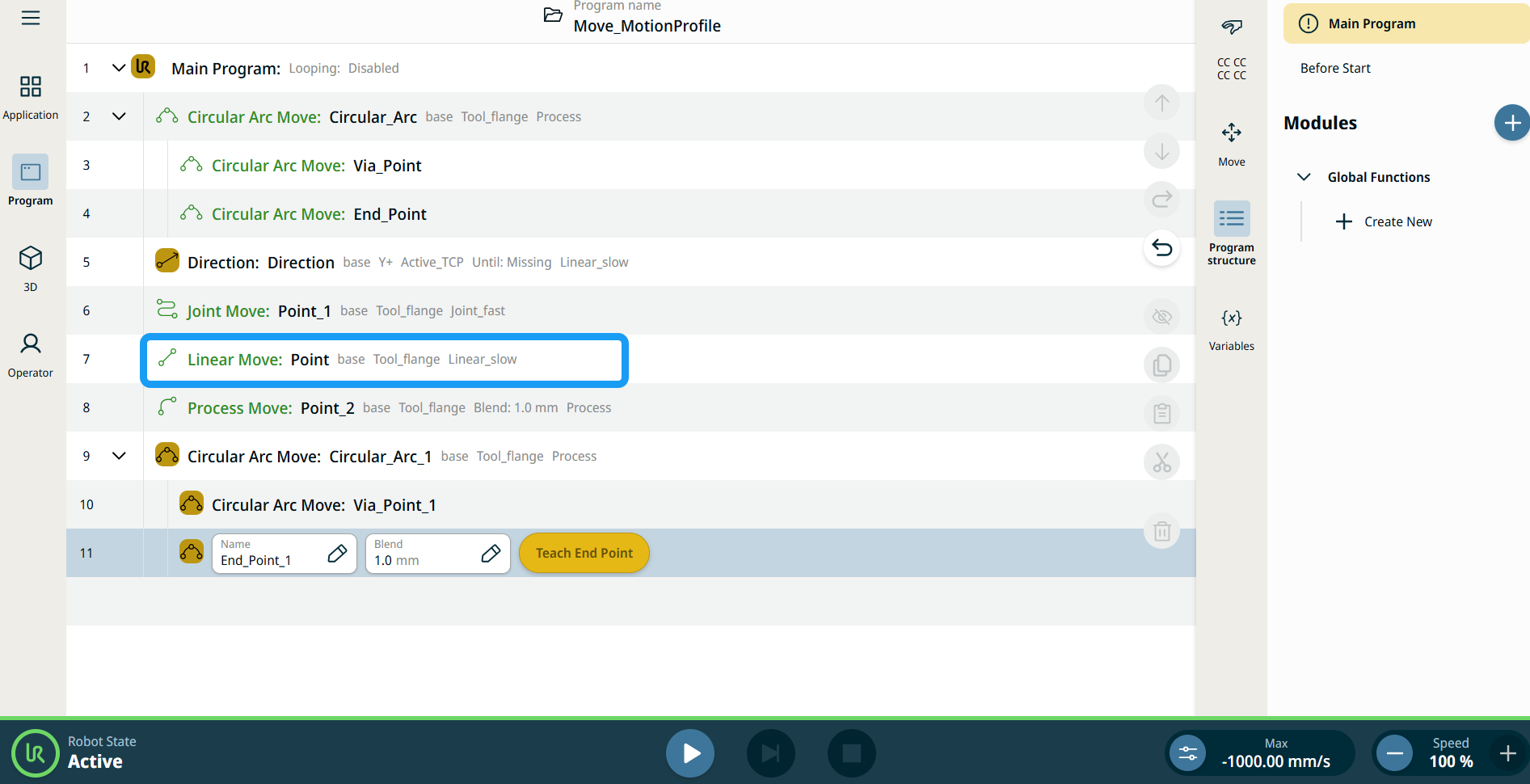
| Etiquetas de perfil de movimiento en nodos de movimiento |
Todos los nodos de comando relacionados con movimiento en el árbol de programa muestran el Perfil de movimiento asociado a cada nodo. Esta función permite a los usuarios ver el perfil de movimiento seleccionado en un nodo Mover. Esta función se implementa en los siguientes nodos de comando: Los nodos de movimiento con perfil de movimiento personalizado mostrarán los valores de velocidad y aceleración en lugar del perfil de movimiento. |
|
|
|
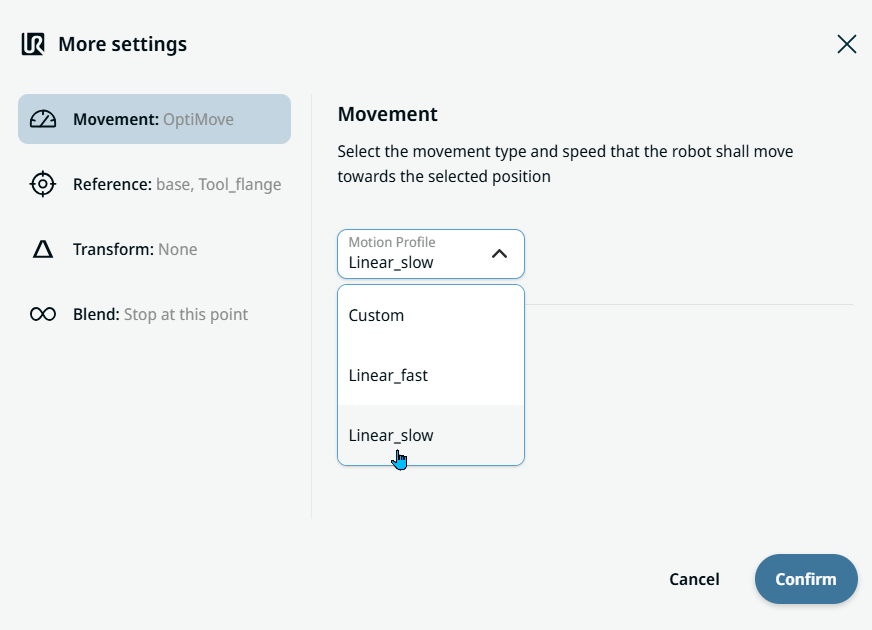
| Movement setting |
|
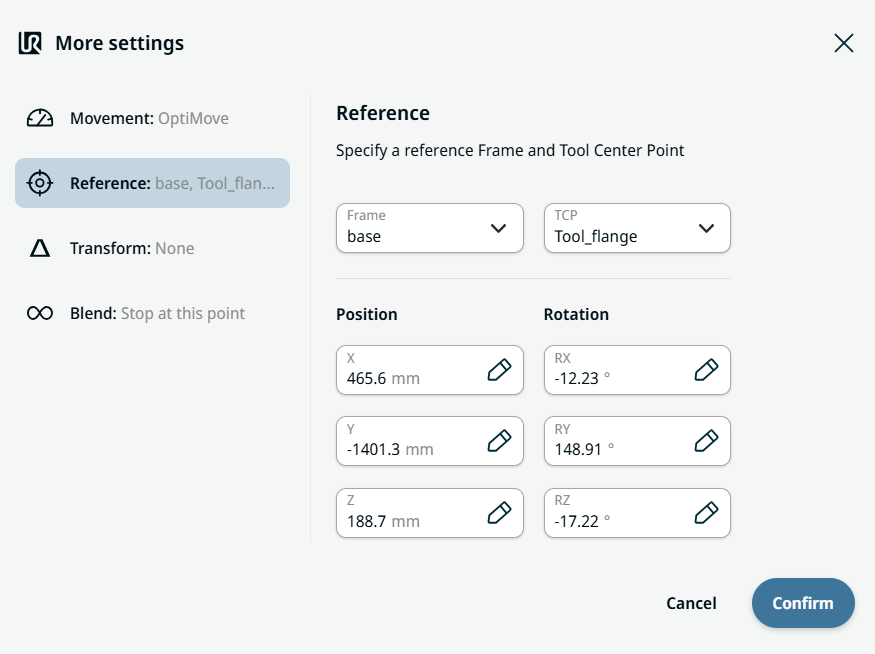
| Reference setting |
|
| Transform setting |
|
|
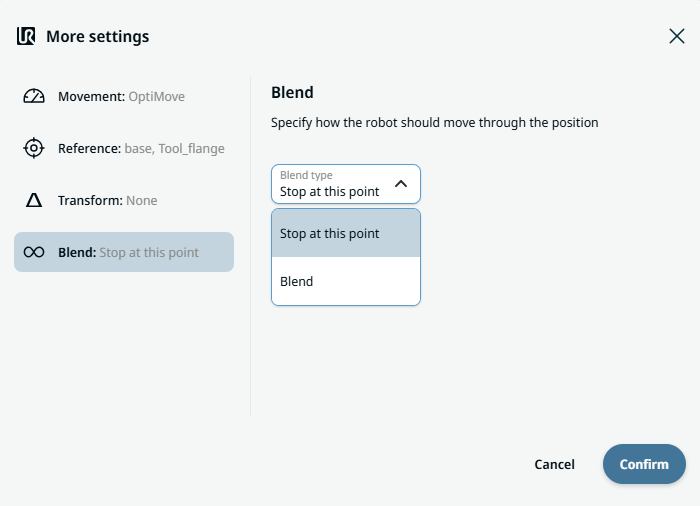
Blend setting |
|