PolyScope X Übersicht
| Übersicht |
PolyScope X ist die auf dem Teach-Pendant installierte grafische Benutzeroberfläche (GUI), die den Roboterarm über einen Touchscreen bedient. Über die Schnittstelle von PolyScope X können Sie Programme erstellen, laden und ausführen. Aktualisieren Sie Ihre Software stets auf die neueste Version.
|
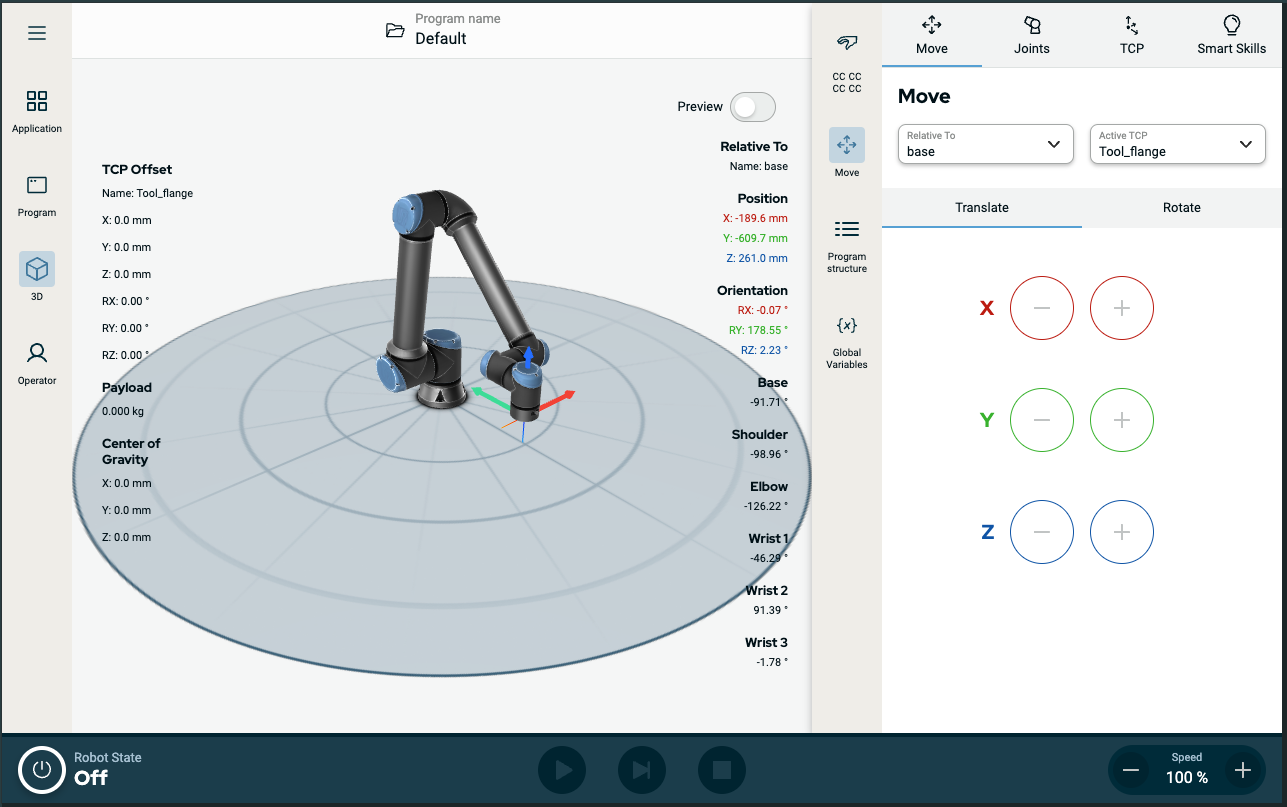
| Anzeige des Hauptbildschirms |
|
 in der Hauptnavigation. So erhalten Sie eine dreidimensionale Ansicht des Roboterarms in X-Y-Z-Koordinaten.
in der Hauptnavigation. So erhalten Sie eine dreidimensionale Ansicht des Roboterarms in X-Y-Z-Koordinaten.




| Bildschirmkombinationen |
Der Hauptbildschirm und der Multitasking-Bildschirm bilden zusammen den Betriebsbildschirm des Roboters. Der Multitasking-Bildschirm ist unabhängig vom Hauptbildschirm, sodass Sie verschiedene Aufgaben ausführen können. Sie können beispielsweise ein Programm im Hauptbildschirm konfigurieren, während Sie den Roboterarm im Multitasking-Bildschirm bewegen. Sie können den Multitasking-Bildschirm auch ausblenden, wenn er nicht benötigt wird.
|
| So blenden Sie den Multitasking-Bildschirm ein/aus |
|