Linear Move
| Beschreibung |
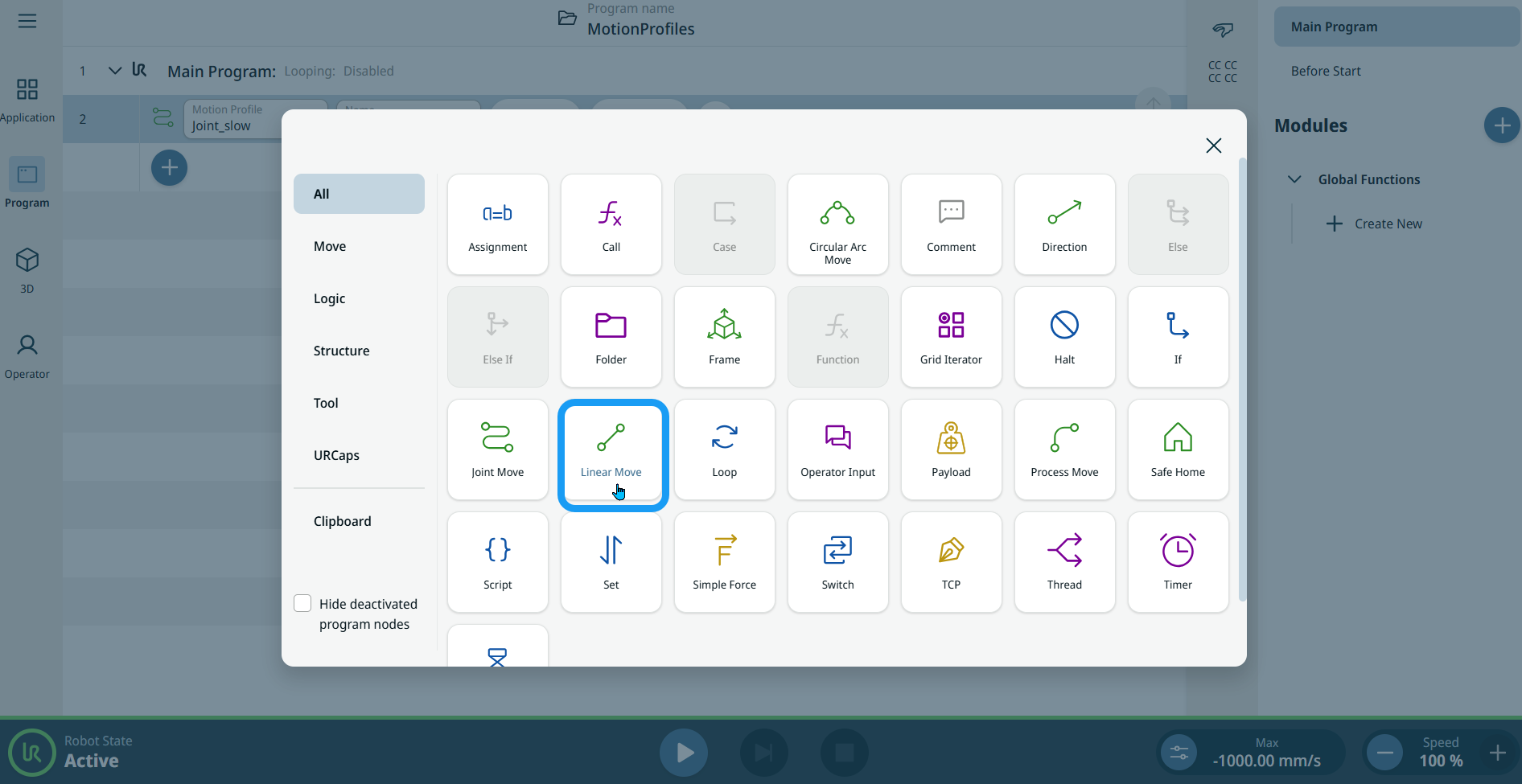
The Linear Move command node supports Motions Profiles as Joint Move, but it creates a movement that is a direct line from point A and point B. It moves the Tool Center Point (TCP) linearly between waypoints. Dies bedeutet, dass jedes Gelenk eine kompliziertere Bewegung ausführt, um das Werkzeug auf einer geraden Bahn zu halten.
|
|
To access Linear Move command |
|
|
|
|
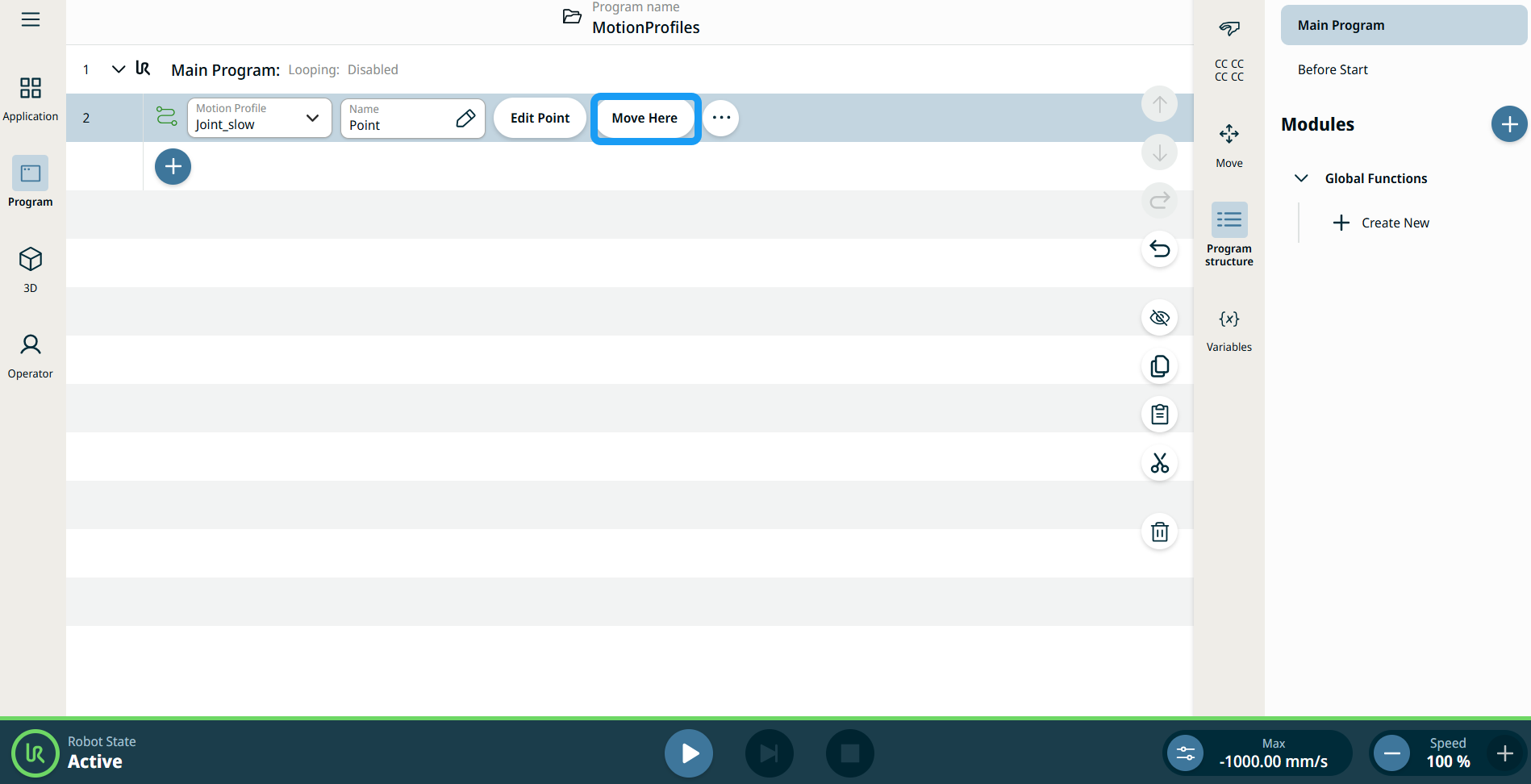
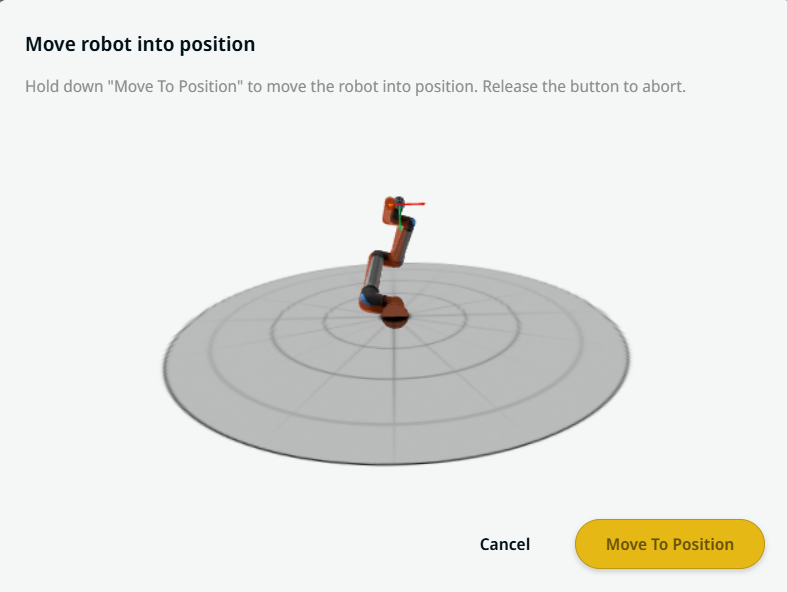
| Die Schaltfläche Hierher Bewegen verwenden |
Die Schaltfläche Hierher Bewegen ist bei den Befehlen Linear Move und Joint Move zu sehen. Mit dieser Funktion können Sie direkt aus der Programmstruktur zur Position eines Wegpunktes bewegen. Durch das Drücken auf die Schaltfläche Hierher Bewegen wird der Dialog Roboter in Position bewegen geöffnet. Die Schaltfläche ist sichtbar, wenn der Wegpunkt geteacht wurde und ist nur aktiv, wenn der Roboter sich im Normalen oder im Reduzierten Modus befindet.
|
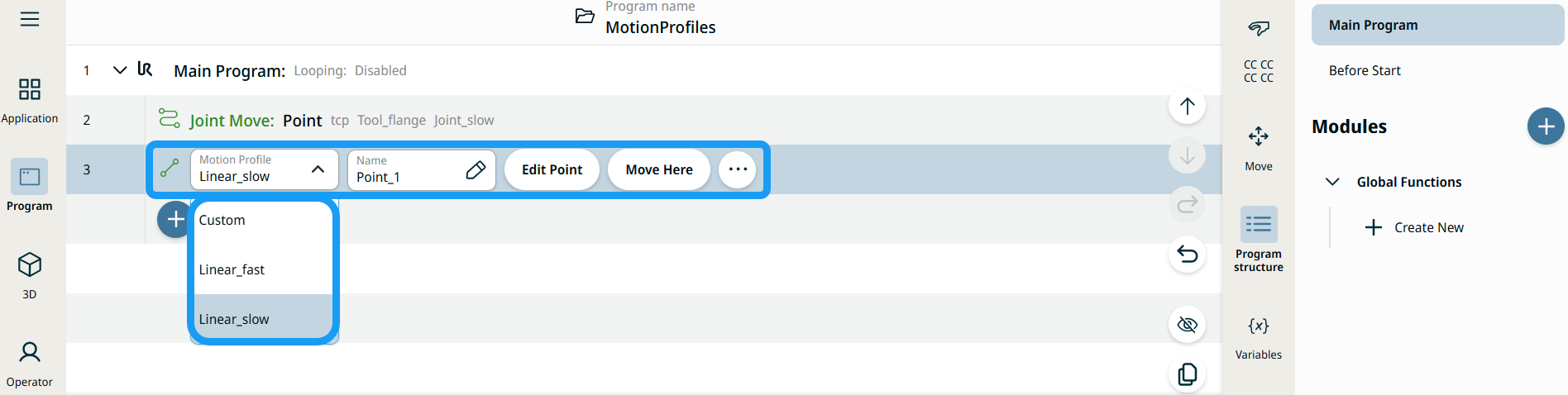
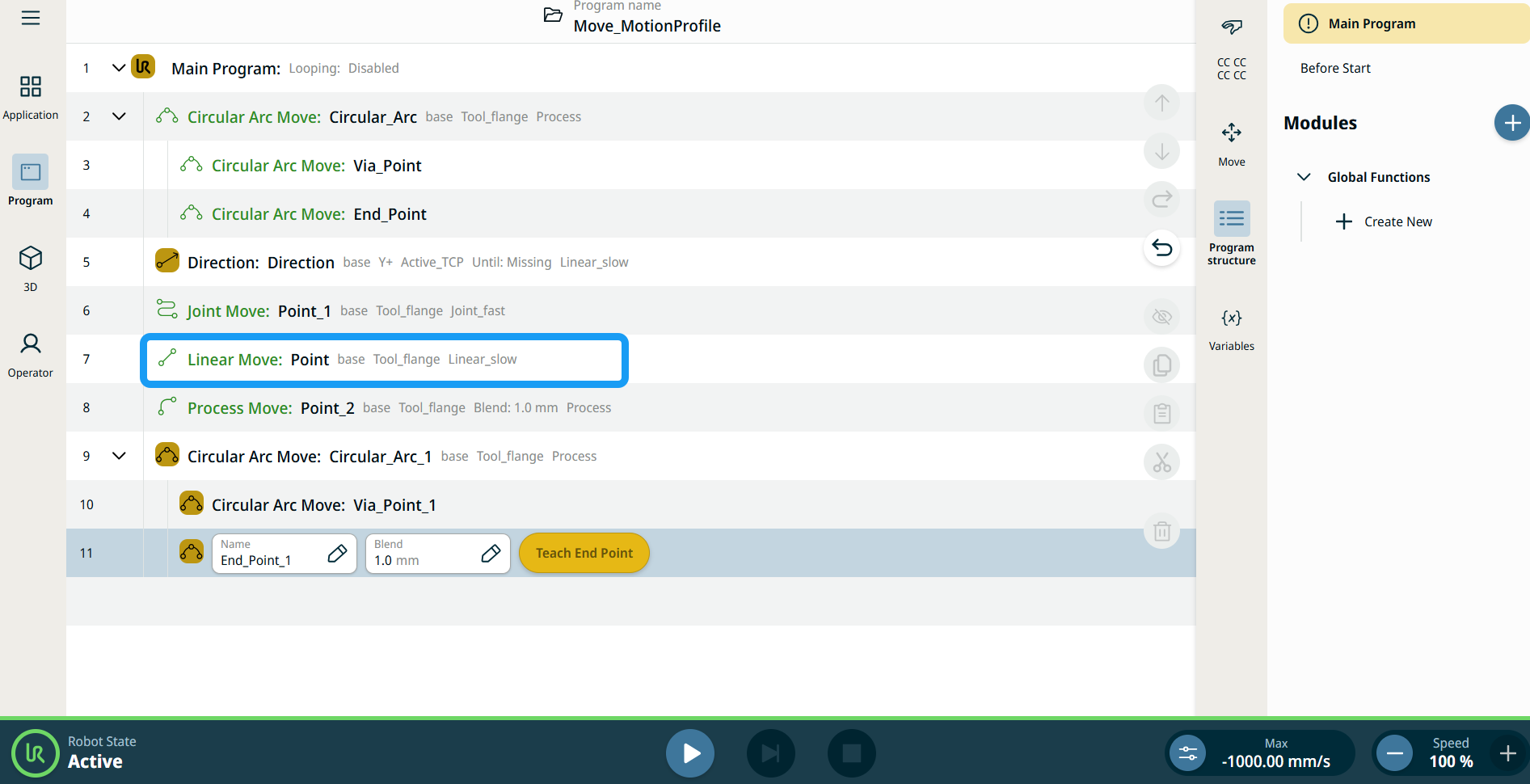
| Bewegungsprofil-Kennzeichnungen bei Bewegungsknoten |
Alle Bewegungsbezogenen Befehlsknoten in der Programmstruktur zeigen das Bewegungsprofil an, welches mit jedem Knoten verknüpft ist. Diese Funktion ermöglicht es Benutzern, das ausgewählte Bewegungsprofil bei einem Bewegen-Knoten zu sehen. Diese Funktion ist bei den folgenden Befehlsknoten implementiert: Bewegungsknoten mit benutzerdefiniertem Bewegungsprofil zeigen die Werte für die Geschwindigkeit und Beschleunigung an. |
|
|
|
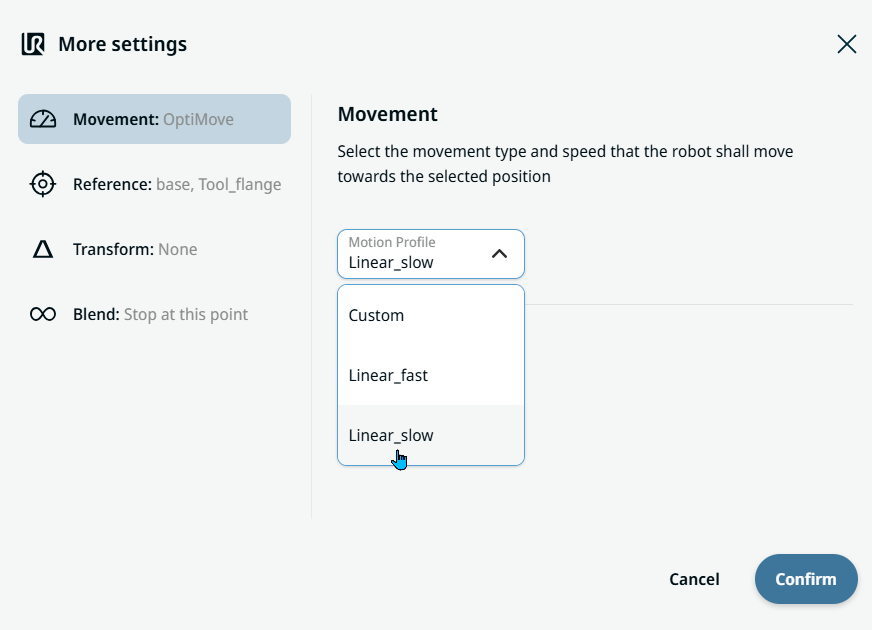
| Movement setting |
|
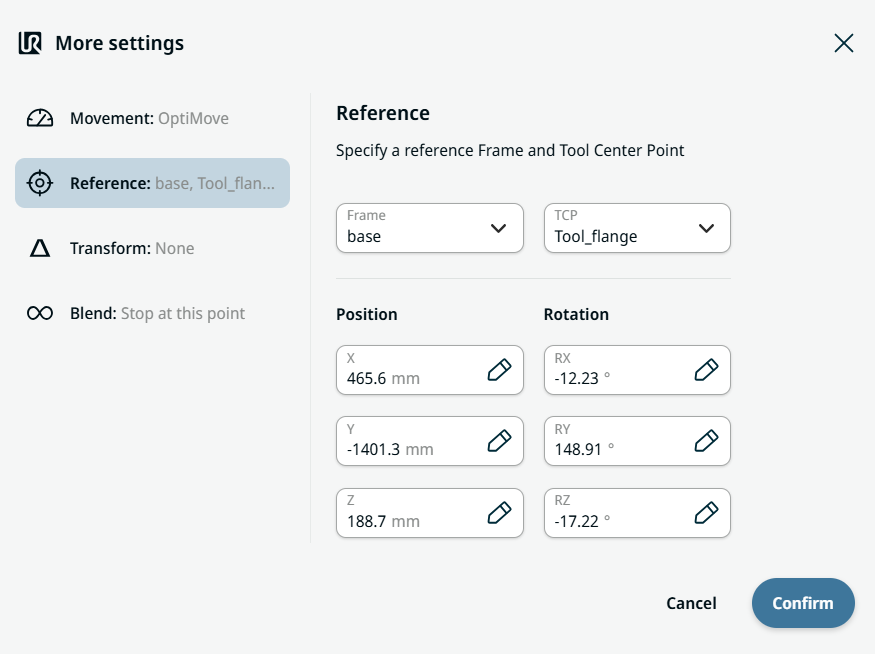
| Reference setting |
|
| Transform setting |
|
|
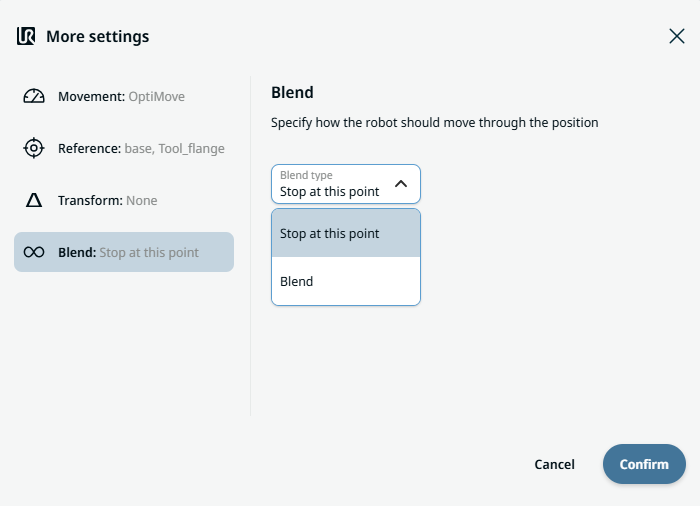
Blend setting |
|